一种可定位式硅胶加工用裁切机的制作方法
1.本实用新型涉及裁切机领域,特别涉及一种可定位式硅胶加工用裁切机。
背景技术:
2.硅胶分为有机硅胶和无机硅胶两种,是一种常见的吸附材料,由硅胶制成的硅胶板在生产加工过程中,需采用裁切机对硅胶板进行裁切,而为了保证切口的平整性,一般采用激光刀头而非刀片进行切割,本方案具体涉及可定位式硅胶加工用裁切机;现有的硅胶加工用裁切机在使用时,输送硅胶板的输送辊之间距离固定,不便于进行调节,当硅胶板的长度小于用于进料和出料两个输送辊之间的距离时,便无法完成出料过程,需要手动输送,较为麻烦,同时需要提前在硅胶板上刻画裁切线方能进行定位裁切,刻画的裁切线易导致裁切切口不平整,且只能进行直线裁切,无法进行圆形裁切。
技术实现要素:
3.本实用新型的主要目的在于提供一种可定位式硅胶加工用裁切机,可以有效解决背景技术中的问题。
4.为实现上述目的,本实用新型采取的技术方案为:
5.一种可定位式硅胶加工用裁切机,包括底箱,所述底箱的顶端安装有辊运组件,底箱的顶端且位于辊运组件的上方安装有龙门架,贯穿龙门架的上下端居中固定安装有主电机,主电机的输出轴末端固定安装有搭载箱,搭载箱的两侧均固定安装有机箱,机箱的底端固定安装有定位组件,两个机箱之间且位于搭载箱的颞部居中设置有丝杆,其中一个机箱的内部且位于丝杆的一端固定安装有伺服电机,丝杆的外侧设置有丝套,丝套的底部固定安装有激光刀头,丝套的底部且位于激光刀头的一侧固定安装有对点激光器;
6.所述定位组件包括三个长短不一的固定架,三个固定架在机箱的底部由内而外呈直线形依次排列,且位于中间的固定架的长度大于位于两边的固定架的长度,其中位于中间的固定架的内侧靠底端设置有反射镜一,位于外侧的固定架的内侧设置有定位激光器,位于内侧的固定架的内侧设置有反射镜二。
7.作为本实用新型的进一步方案,所述辊运组件包括两根滑轨,滑轨的前后端均固定安装有固定块,滑轨的外侧靠前后端均设置有搭载块,位于前端的两个搭载块之间、位于后端的两个搭载块之间均设置有输送辊,贯穿搭载块的顶部居中设置有调节旋钮,其中一根滑轨上的两个搭载块的外侧靠底端均固定安装有副电机。
8.作为本实用新型的进一步方案,所述龙门架的四个支脚底端与底箱的顶端固定连接,搭载箱的俯视面呈圆形设置,伺服电机的机壳与机箱固定连接,伺服电机的输出轴与丝杆固定连接,丝杆与机箱的连接处安装有轴承,激光刀头打出的激光点与对点激光器打出的激光点间距为1cm。
9.作为本实用新型的进一步方案,所述固定架的顶端与机箱的底端固定连接,定位激光器、反射镜一和反射镜二均通过转轴与固定架活动连接,固定架的架体内部均安装有
马达,且马达的输出轴与转轴固定连接,反射镜一的镜面朝上,反射镜二的镜面朝下。
10.作为本实用新型的进一步方案,四个所述固定块的底端分别与底箱顶端且靠近龙门架四个支脚内侧的位置固定连接,搭载块与滑轨滑动连接,调节旋钮与搭载块螺纹连接。
11.作为本实用新型的进一步方案,所述输送辊的辊轴通过轴承与搭载块活动连接,副电机的输出轴与输送辊的辊轴固定连接。
12.与现有技术相比,本实用新型具有如下有益效果:
13.本实用新型通过设置辊运组件,便于根据硅胶板的长度调节两个输送辊之间的距离,方便在裁切硅胶板时对硅胶板进行自动输送;
14.通过设置定位组件,便于进行两点定位确定裁切线的位置,方便对硅胶板进行定位裁切;
15.通过设置定位组件配合主电机、搭载箱、伺服电机、丝杆、丝套和对点激光器,便于定位圆形裁切时的半径长度,方便对硅胶板进行圆形裁切。
附图说明
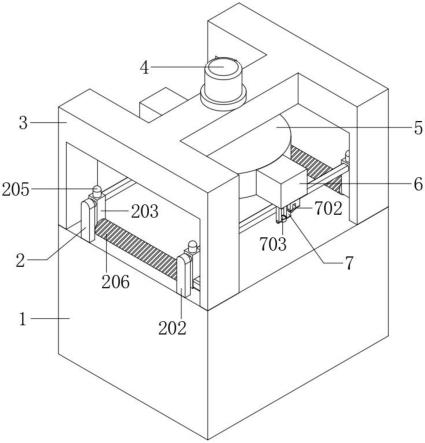
16.图1为本实用新型一种可定位式硅胶加工用裁切机的整体结构示意图;
17.图2为本实用新型一种可定位式硅胶加工用裁切机中搭载箱和机箱的内部结构主视图;
18.图3为本实用新型一种可定位式硅胶加工用裁切机中定位组件的结构示意图;
19.图4为本实用新型一种可定位式硅胶加工用裁切机中卷运组价的结构示意图。
20.图中:1、底箱;2、辊运组件;3、龙门架;4、主电机;5、搭载箱;6、机箱;7、定位组件;8、伺服电机;9、丝杆;10、丝套;11、激光刀头;12、对点激光器;201、滑轨;202、固定块;203、搭载块;204、副电机;205、调节旋钮;206、输送辊;701、固定架;702、定位激光器;703、反射镜一;704、反射镜二。
具体实施方式
21.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
22.如图1-图4所示,一种可定位式硅胶加工用裁切机,包括底箱1,底箱1的顶端安装有辊运组件2,底箱1的顶端且位于辊运组件2的上方安装有龙门架3,贯穿龙门架3的上下端居中固定安装有主电机4,主电机4的输出轴末端固定安装有搭载箱5,搭载箱5的两侧均固定安装有机箱6,机箱6的底端固定安装有定位组件7,两个机箱6之间且位于搭载箱5的颞部居中设置有丝杆9,其中一个机箱6的内部且位于丝杆9的一端固定安装有伺服电机8,丝杆9的外侧设置有丝套10,丝套10的底部固定安装有激光刀头11,丝套10的底部且位于激光刀头11的一侧固定安装有对点激光器12;
23.定位组件7包括三个长短不一的固定架701,三个固定架701在机箱6的底部由内而外呈直线形依次排列,且位于中间的固定架701的长度大于位于两边的固定架701的长度,其中位于中间的固定架701的内侧靠底端设置有反射镜一703,位于外侧的固定架701的内侧设置有定位激光器702,位于内侧的固定架701的内侧设置有反射镜二704。
24.在本方案中,为了在裁切硅胶板时便于进料和出料设置了辊运组件2,辊运组件2
包括两根滑轨201,滑轨201的前后端均固定安装有固定块202,滑轨201的外侧靠前后端均设置有搭载块203,位于前端的两个搭载块203之间、位于后端的两个搭载块203之间均设置有输送辊206,贯穿搭载块203的顶部居中设置有调节旋钮205,其中一根滑轨201上的两个搭载块203的外侧靠底端均固定安装有副电机204。
25.龙门架3的四个支脚底端与底箱1的顶端固定连接,搭载箱5的俯视面呈圆形设置,伺服电机8的机壳与机箱6固定连接,伺服电机8的输出轴与丝杆9固定连接,丝杆9与机箱6的连接处安装有轴承,激光刀头11打出的激光点与对点激光器12打出的激光点间距为1cm,利用龙门架3搭载伺服电机8,同时启动伺服电机8后带动丝杆9转动,再通过丝杆9配合丝套10带动激光刀头11移动,便于调节激光刀头11的位置进行裁切。
26.固定架701的顶端与机箱6的底端固定连接,定位激光器702、反射镜一703和反射镜二704均通过转轴与固定架701活动连接,固定架701的架体内部均安装有马达,且马达的输出轴与转轴固定连接,反射镜一703的镜面朝上,反射镜二704的镜面朝下,开启定位激光器702,启动马达后带动转轴转动,进而调节定位激光器702、反射镜一703和反射镜二704的角度,使定位激光器702打出的激光照射在反射镜一703上,再通过反射镜一703反射到反射镜二704上,最后通过反射镜二704反射到底箱1顶面待裁切的硅胶板上,通过两个定位激光器702发出的激光定位两个激光点,两个激光点之间的连线即是裁切线。
27.四个固定块202的底端分别与底箱1顶端且靠近龙门架3四个支脚内侧的位置固定连接,搭载块203与滑轨201滑动连接,调节旋钮205与搭载块203螺纹连接,拧松调节旋钮205后沿着滑轨201的方向移动搭载块203带动输送辊206移动,当两个输送辊206之间间距合适后再拧紧调节旋钮205锁定搭载块203,便于根据硅胶板的长度调节两个输送辊206之间的距离。
28.输送辊206的辊轴通过轴承与搭载块203活动连接,副电机204的输出轴与输送辊206的辊轴固定连接,启动副电机204后带动输送辊206转动,在输送辊206转动的同时对处于其底面的硅胶板进行运输。
29.需要说明的是,本实用新型为一种可定位式硅胶加工用裁切机,在使用时,先拧松调节旋钮205,再沿着滑轨201的方向移动搭载块203带动输送辊206同步移动,两个输送辊206之间的距离根据待裁切硅胶板的长度决定,调节好两个输送辊206之间的距离后再拧紧调节旋钮205锁定搭载块203,之后启动副电机204带动输送辊206转动,再启动对点激光器12;
30.在对硅胶板进行水平直线裁切时,将硅胶板从后端的输送辊206底端插入,当对点激光器12的激光打在硅胶板上时,关闭副电机204,开启定位激光器702,启动马达后带动转轴转动,进而调节定位激光器702、反射镜一703和反射镜二704的角度,使定位激光器702打出的激光照射在反射镜一703上,再通过反射镜一703反射到反射镜二704上,最后通过反射镜二704反射到底箱1顶面待裁切的硅胶板上,通过两个定位激光器702发出的激光在硅胶板上定位两个激光点确认裁切线的位置,之后再启动伺服电机8和激光刀头11进行裁切,伺服电机8带动丝杆9转动,通过丝杆9带动丝套10移动,在丝套10移动的同时带动激光刀头11对硅胶板进行裁切,裁切过程中,对点激光器12打出的激光点距离左边定位激光器702打出的激光点间隔1cm时,伺服电机8反向转动,当对点激光器12打出的激光点超出右边的定位激光器702打出的激光点1cm时,伺服电机8反向转动至对点激光器12打出的激光点处于正
中间位置时,伺服电机8停止转动,激光刀头11关闭;
31.在对硅胶板进行斜向直线裁切时,裁切线的定位方式同水平直线裁切时的定位方式,之后启动主电机4带动搭载箱5转动和机箱6转动,进而带动定位激光器702转动,使两个定位激光器702激光点之间的直线呈斜向设置后再进行裁切即可,在对硅胶板进行圆形裁切时,启动马达带动转轴转动,通过转轴带动定位激光器702、反射镜一703和反射镜二704转动,当两个定位激光器702的激光点重合时关闭马达,此时重合点处于硅胶板中心位置,再启动对点激光器12,启动伺服电机8带动丝杆9转动,通过丝杆9带动丝套10、激光刀头11和对点激光器12同步移动,此时,对点激光器12的激光点到重合点之间的距离加减1cm即为裁切半径,其中激光刀头11远离伺服电机8一侧时加1cm,激光刀头11靠近伺服电机8一侧时则减1cm,确认裁切半径后,再启动主电机4和激光刀头11,通过主电机4带动搭载箱5转动,进而带动激光刀头11进行圆形裁切,完成裁切后再启动副电机204带动输送辊206进行输送。
32.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1