一种用于铝型材加工的智能抬刀方法与流程
本发明涉及型材智能加工,尤其涉及一种用于铝型材加工的智能抬刀方法。
背景技术:
1、当前,在铣床加工的过程抬刀一直是一个被忽略的问题。通过智能抬刀可以减少加工的时间,尤其是在一块材料上需要加工较多的图形时,可以减少生产成本、提高公司收益。
2、公开号为cn107643727a的中国专利公开了一种基于机器视觉的剪毛机智能抬刀系统及其实现方法,这种装置可以通过视觉方法让其通过控制系统自动完成刷毛刀及剪毛刀的自动抬刀让布缝动作,结构简单、控制精度高、故障率低、省工、增效、提高产品质量。
3、综合市面现有的抬刀功能,部分是通过用户输入的参数,每次固定抬刀的高度,这种方法如果用户设置高了,会导致加工时间边长,加工效率低下,如果设置低了,又会有安全隐患;另一部分是通过视觉系统来判断抬刀高度,进行智能抬刀,这种方式会增加生产成本,且不适配一些没有视觉功能的机器。
4、因此,急需一种新的方案来解决上述技术问题。
技术实现思路
1、本发明的目的在于克服上述现有技术的问题,提供了一种用于铝型材加工的智能抬刀方法,以解决现有技术中因参数设置不当影响加工效率和易造成安全隐患的技术问题。
2、上述目的是通过以下技术方案来实现:
3、一种用于铝型材加工的智能抬刀方法,包括铝型材加工机构和控制器,所述铝型材加工机构接受所述控制器发出的加工指令,并根据所述加工指令进行铝型材加工,所述铝型材加工机构包括解析传感器模块、加工传感器模块和刀具,方法如下:
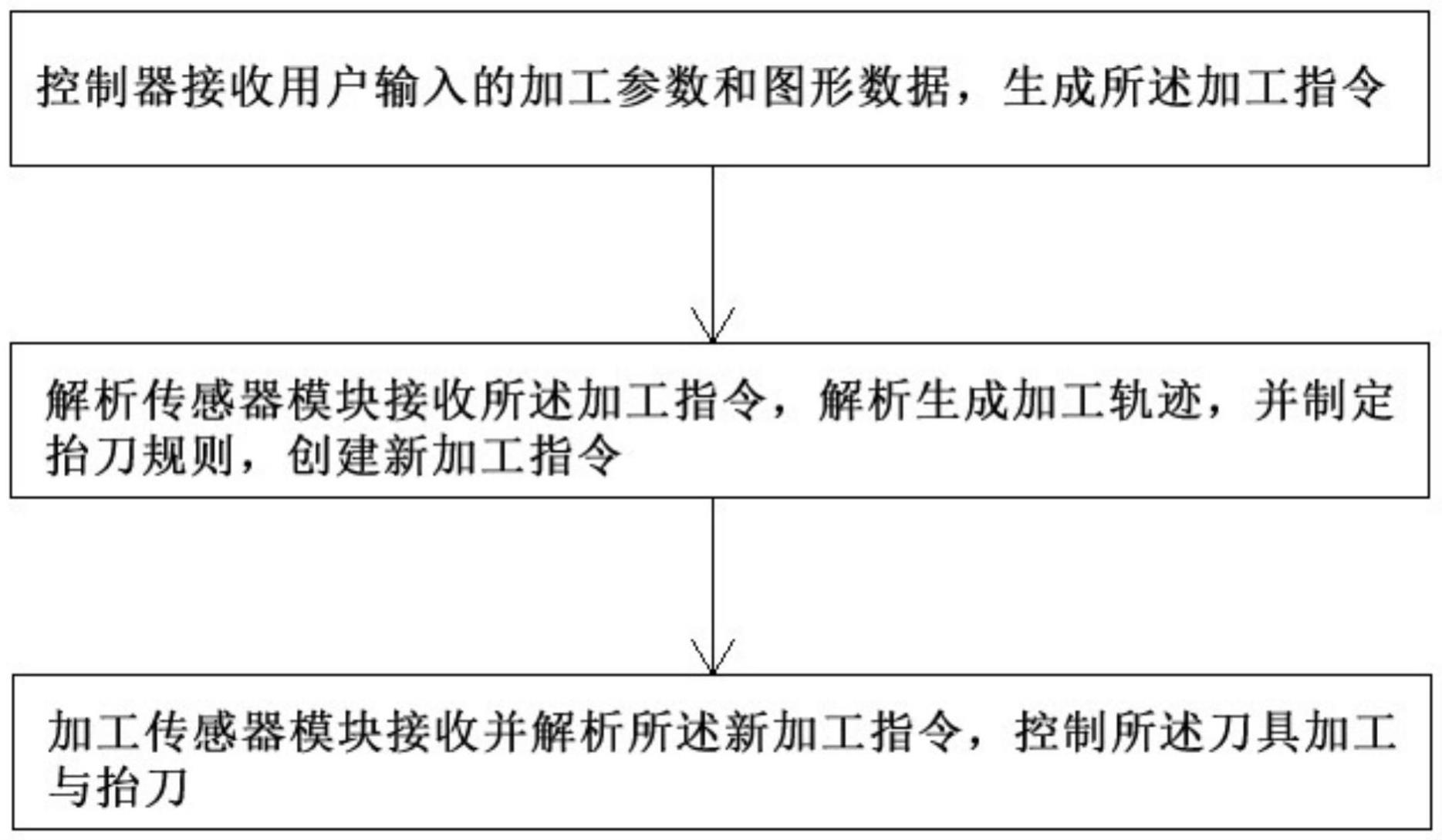
4、所述控制器接收用户输入的加工参数和图形数据,生成所述加工指令;
5、所述解析传感器模块接收所述加工指令,解析生成加工轨迹,并制定抬刀规则,创建新加工指令;
6、所述加工传感器模块接收并解析所述新加工指令,控制所述刀具加工与抬刀。
7、进一步地,所述加工参数包括型材信息、用户期望安全高度、刀库位置、夹具高度和z偏置信息。
8、进一步地,所述刀具包括铣刀和钻孔刀;所述铣刀用于切割型材,所述钻孔刀用于对型材钻孔。
9、进一步地,所述抬刀规则包括:
10、(1)刀号判断
11、若刀号不一致,则需要换刀,抬刀高度=刀库换刀高度;
12、(2)面号判断
13、若刀号一致,则判断面号是否一致;
14、若面号不一致,则需要翻面,抬刀高度具体为:
15、顶面抬刀高度=用户期望安全高度+顶面z方向偏置+材料高度和顶面夹具高度中较大的一项+当前刀具的长度;
16、前面安全高度=用户期望安全高度+前面z偏置+材料宽度+前面夹具高度+当前刀具的长度;
17、后面安全高度=用户期望安全高度+后面z偏置+材料宽度+后面夹具高度+当前刀具的长度;
18、(3)中途是否需要经过夹具判断
19、若所述面号一致,则判断中途是否需要经过夹具;
20、若中途需要经过夹具,则抬刀高度具体为:
21、顶面安全高度=用户期望安全高度+顶面z偏置+材料高度和顶面夹具高度其中较大的一项+当前刀具的长度;
22、前面安全高度=用户期望安全高度+前面z偏置+材料宽度+前面夹具高度+当前刀具的长度;
23、后面安全高度=用户期望安全高度+后面z偏置+材料宽度+后面夹具高度+当前刀具长度;
24、若中途不需要经过夹具,则抬刀高度具体为:
25、顶面安全高度=用户期望安全高度+顶面z偏置+材料高度+当前刀具的长度;
26、前面安全高度=用户期望安全高度+前面z偏置+材料宽度+当前刀具的长度;
27、后面安全高度=用户期望安全高度+后面z偏置+材料宽度+当前刀具的长度。
28、进一步地,在所述(2)面号判断中,根据当前所加工面和下次加工所在面的安全高度,取其中高的一个为安全高度。
29、进一步地,若当前所加工面和下次加工所在面为同一个面,则就取对应面作为安全高度。
30、有益效果
31、本发明所提供的一种用于铝型材加工的智能抬刀方法,可根据用户输入的夹具高度、材料的宽、材料的高、安全距离、工件z偏置、换刀高度、夹具高度、下一个加工图形的所在面、下一个加工图形的刀号和当下一个加工图形的位置这些参数,自动运算出需要抬刀的高度,并进行抬刀,本方法中高度运算的原则是保持刀具尽量低但是要确保安全,能有效提高加工效率和公司效益。本方法可保证安全性,软件智能算出来的安全高度是安全的,不会出现撞刀或者安全高度太低的情况;还可提高加工效率,软件智能算的安全高度的原则是保证安全的前提下,尽量低的安全高度,这样抬刀的时间就会被缩短,加工一个工件的时间也就会被缩短,提高加工效率。
技术特征:
1.一种用于铝型材加工的智能抬刀方法,包括铝型材加工机构和控制器,所述铝型材加工机构接受所述控制器发出的加工指令,并根据所述加工指令进行铝型材加工,其特征在于,所述铝型材加工机构包括解析传感器模块、加工传感器模块和刀具,方法如下:
2.根据权利要求1所述的一种用于铝型材加工的智能抬刀方法,其特征在于,所述加工参数包括型材信息、用户期望安全高度、刀库位置、夹具高度和z偏置信息。
3.根据权利要求1所述的一种用于铝型材加工的智能抬刀方法,其特征在于,所述刀具包括铣刀和钻孔刀;所述铣刀用于切割型材,所述钻孔刀用于对型材钻孔。
4.根据权利要求1所述的一种用于铝型材加工的智能抬刀方法,其特征在于,所述抬刀规则包括:
5.根据权利要求4所述的一种用于铝型材加工的智能抬刀方法,其特征在于,在所述(2)面号判断中,根据当前所加工面和下次加工所在面的安全高度,取其中高的一个为安全高度。
6.根据权利要求5所述的一种用于铝型材加工的智能抬刀方法,其特征在于,若当前所加工面和下次加工所在面为同一个面,则就取对应面作为安全高度。
技术总结
本发明涉及型材智能加工技术领域,具体是一种用于铝型材加工的智能抬刀方法,包括:(1)所述控制器接收用户输入的加工参数和图形数据,生成所述加工指令;(2)所述解析传感器模块接收所述加工指令,解析生成加工轨迹,并制定抬刀规则,创建新加工指令;(3)所述加工传感器模块接收并解析所述新加工指令,控制所述刀具加工与抬刀。本方法可保证安全性,软件智能算出来的安全高度是安全的,不会出现撞刀或者安全高度太低的情况;还可提高加工效率,软件智能算的安全高度的原则是保证安全的前提下,尽量低的安全高度,这样抬刀的时间就会被缩短,加工一个工件的时间也就会被缩短,提高加工效率。
技术研发人员:吴桐桐,邹骏宇
受保护的技术使用者:无锡信捷电气股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!