一种计算机PCB板双面焊接设备及方法
本发明涉及pcb板焊接,特别涉及一种计算机pcb板双面焊接设备及方法。
背景技术:
1、随着技术的发展,在计算机pcb板的两个面上都需要焊接大量的元器件,而现有技术中,计算机pcb板上元器件的焊接是在生产线上进行,生产线上在不同工位上焊接不同的元器件,而且双面都要焊接元器件的计算机pcb板还需要工位进行翻转,这样导致整个生产线上需要设置有多个工位,生产线也非常的长,占用空间大,这样也导致投入成本大。同时,由于计算机pcb板焊接车间属于无尘车间,面积越大的无尘车间的导致维护成本也就越高。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种计算机pcb板双面焊接设备及方法。
2、本发明的目的是通过以下技术方案来实现的:
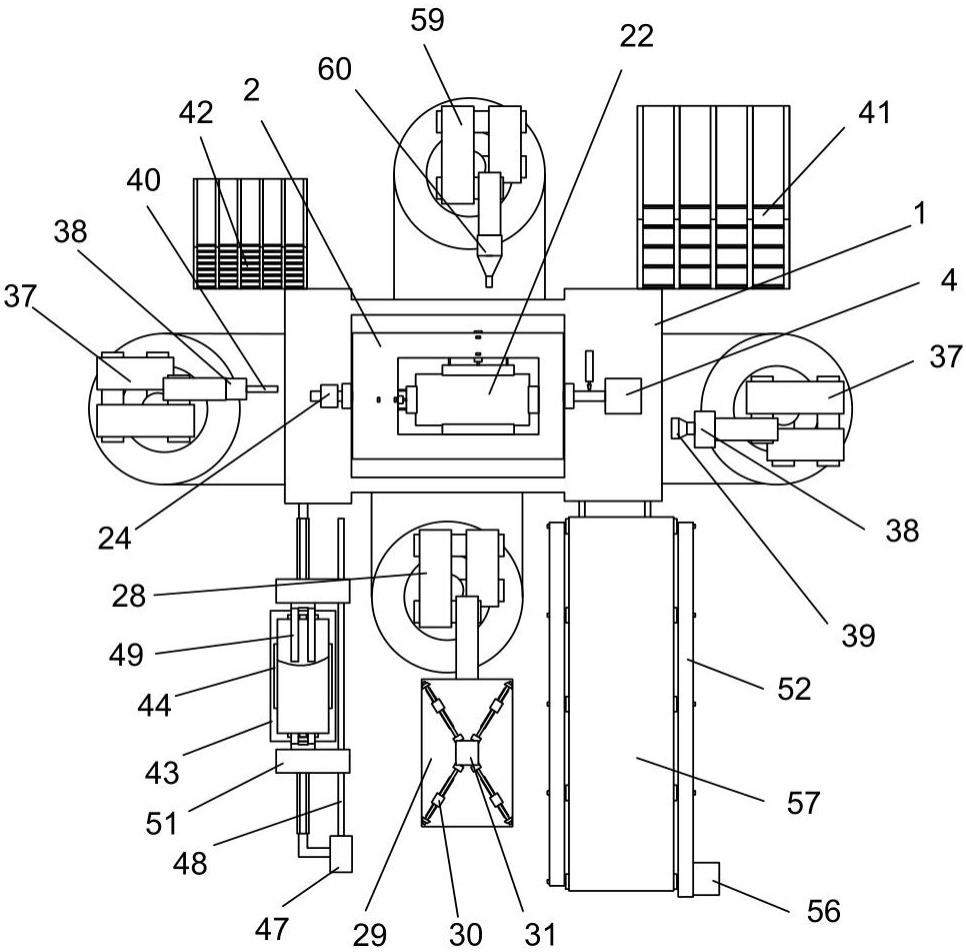
3、一种计算机pcb板双面焊接设备,包括安装支架、pcb板进料运输组件、pcb板出料运输组件、pcb板抓取组件、pcb板翻转组件、pcb板焊接组件和元件运输摘取组件,所述pcb板进料运输组件与所述安装支架的一侧配合,所述pcb板出料运输组件与所述安装支架的另一侧配合,所述pcb板抓取组件、所述pcb板翻转组件、所述pcb板焊接组件和所述元件运输摘取组件均固定设置在所述安装支架上,且所述pcb板进料运输组件、所述pcb板出料运输组件和所述pcb板翻转组件均与所述pcb板抓取组件配合,所述pcb板焊接组件和所述元件运输摘取组件均与所述pcb板翻转组件配合,所述pcb板进料运输组件、所述pcb板出料运输组件、所述pcb板抓取组件、所述pcb板翻转组件、所述pcb板焊接组件和所述元件运输摘取组件均与控制中心电连接;
4、所述pcb板翻转组件包括翻转板、轴承座、转动驱动电机、第一定位板、第二定位板、第一锁紧板、第二锁紧板、第一电动推杆、第二电动推杆、第三电动推杆、导电外环、导电内环、导电推头、推头弹簧和限位插销,所述翻转板的一端通过第一转动轴与所述转动驱动电机的输出轴相连,所述翻转板的另一端设置有与所述第一转动轴同轴的第二转动轴,所述第一转动轴和所述第二转动轴分别通过所述轴承座固定在所述安装支架上,所述翻转板的中部设置有贯穿且截面呈方形的安装孔,所述第一定位板和所述第二定位板分别固定在所述安装孔内相邻的两个内壁上,所述第一锁紧板固定设置在所述第一电动推杆的输出端上且与所述第一定位板相对设置,所述第二锁紧板固定设置在所述第二电动推杆的输出端上且与所述第二定位板相对设置,所述第一电动推杆和所述第二电动推杆均通过调节部件固定设置在所述翻转板上,所述第一锁紧板上固定设置有第一导向杆,所述安装孔的侧壁上设置有与所述第一导向杆配合的第一导向孔,所述第二锁紧板上固定设置有第二导向杆,所述安装孔的侧壁上设置有与所述第二导向杆配合的第二导向孔,所述第一定位板上沿其长度方向设置有与计算机pcb板边缘配合的第一定位槽,所述第二定位板上沿其长度方向设置有与计算机pcb板边缘配合的第二定位槽,所述第一锁紧板上沿其长度方向设置有与计算机pcb板边缘配合的第一锁紧槽,所述第二锁紧板上沿其长度方向设置有与计算机pcb板边缘配合的第二锁紧槽,所述第一定位槽、所述第二定位槽、所述第一锁紧槽和所述第二锁紧槽的底部均处在同一平面上,所述第一转动轴上呈对称设置有两个与所述限位插销配合的限位孔,所述限位插销固定设置在所述第三电动推杆的输出轴上,所述第三电动推杆和所述转动驱动电机均固定设置在所述安装支架上,所述第二转动轴上同轴设置有至少两个所述导电内环,所述导电内环外侧设置有与所述导电内环配合的所述导电外环,所述导电外环固定设置在绝缘座上,所述绝缘座固定设置在所述安装支架上,所述导电外环上设置有多个导电盲孔,所述导电推头的一端设置在所述导电盲孔内,所述导电推头另一端设置有球面端头,所述导电内环的外壁上设置有与所述球面端头配合的导电槽,所述推头弹簧设置在所述导电盲孔内且用于推动所述导电推头作用在所述导电内环上,所述第一电动推杆和所述第二电动推杆均与所述导电内环电连接,所述导电外环、所述第三电动推杆和所述转动驱动电机均与所述控制中心电连接。
5、进一步地,所述调节部件包括调节旋钮,所述翻转板上设置有两个滑动孔,所述第一电动推杆和所述第二电动推杆分别设置在所述滑动孔中,所述调节旋钮设置在所述滑动孔上且用于将所述第一电动推杆和所述第二电动推杆固定在所述滑动孔中,当所述计算机pcb板与所述第一定位板和所述第二定位板均接触时,所述第一锁紧板到所述计算机pcb板最近边缘的距离l1等于所述第二锁紧板到所述计算机pcb板最近边缘的距离l2。
6、进一步地,所述pcb板抓取组件包括第一六轴机器人机械手臂、安装板、夹取杆、夹取驱动电机、主动锥齿轮、从动锥齿轮和传动丝杆,所述第一六轴机器人机械手臂的固定部固定设置在所述安装支架上,所述安装板固定设置在所述第一六轴机器人机械手臂的活动部上,所述安装板上至少设置有三个导向滑槽,所述夹取杆上端滑动设置在所述导向滑槽中,所述传动丝杆转动设置在所述安装板且与所述夹取杆螺纹配合,所述从动锥齿轮固定设置在所述传动丝杆上,所述主动锥齿轮固定设置在所述夹取驱动电机的输出轴上且与所述从动锥齿轮配合,所述夹取驱动电机固定设置在所述安装板上,所述夹取杆的下端上设置有与所述计算机pcb板转角配合的夹取槽,所述第一六轴机器人机械手臂和所述夹取驱动电机均与所述控制中心电连接。
7、进一步地,所述元件运输摘取组件包括大型元件抓取部件、小型元件抓取部件和元件存放部件,所述大型元件抓取部件、所述小型元件抓取部件和所述元件存放部件均固定设置在所述安装支架上,所述大型元件抓取部件和所述小型元件抓取部件均与所述控制中心电连接,且所述大型元件抓取部件和所述小型元件抓取部件均将所述元件存放部件、所述翻转板上的所述计算机pcb板配合。
8、进一步地,所述大型元件抓取部件和所述小型元件抓取部件均包括第二六轴机器人机械手臂和电磁控制阀,所述第二六轴机器人机械手臂的固定部固定设置在所述安装支架上,所述电磁控制阀固定设置在所述第二六轴机器人机械手臂的活动部上,所述第二六轴机器人机械手臂和所述电磁控制阀均与所述控制中心电连接,所述电磁控制阀的一端通过管道与负压机连通,所述大型元件抓取部件还包括吸取盘,所述小型元件抓取部件还包括吸取管,所述吸取盘和所述吸取管分别设置在所述电磁控制阀上。
9、进一步地,所述元件存放部件包括存放架、大元件放置区和小元件放置区,所述存放架固定设置在所述安装支架上,所述存放架上设置有所述大元件放置区和所述小元件放置区,所述大元件放置区上设置有倾斜的大元件放置通道,所述小元件放置区上设置有倾斜的小元件放置通道,所述大元件放置通道和所述小元件放置通道均设置有至少两层且呈阶梯式布置,所述大元件放置通道的下端设置有与所述吸取盘配合的第一抓取口,所述小元件放置通道下端设置有与所述吸取管配合的第二抓取口。
10、进一步地,所述pcb板进料运输组件包括安装座、限位竖板、第四电动推杆、承重板、送料运输驱动电机、反向转动丝杆、楔形挤出块和导轨,所述安装座固定设置所述安装支架的中部上,所述安装座上至少设置有四个所述限位竖板,所述限位竖板与所述计算机pcb板边缘配合,所述安装座上设置有用于支撑所述计算机pcb板的所述承重板板,所述承重板固定设置在所述第四电动推杆的输出轴上,所述第四电动推杆的固定部固定设置在所述安装座上,相对的两个所述限位竖板上均设置有所述导轨,所述导轨上均设置有导向块,两个所述导向块分别设置在所述反向转动丝杆的两端上,所述送料运输驱动电机固定设置在所述安装支架上且用于驱动所述反向转动丝杆转动,所述导向块上设置有用于分离所述计算机pcb板的所述楔形挤出块,所述楔形挤出块的下表面处于水平状态,所述第四电动推杆和所述送料运输驱动电机均与所述控制中心电连接。
11、进一步地,所述pcb板出料运输组件包括运输支架、传送带、主转轮、从动转轮、出料运输驱动电机、缓冲柔性层和支撑滚轮,所述运输支架与所述安装支架相连,所述主转轮与所述从动转轮分别设置在所述运输支架的两端上,所述传送带的两侧分别套设在所述主转轮和所述从动转轮上,所述出料运输驱动电机固定设置在所述运输支架上且用于带动所述主转轮转动,所述运输支架设置有多个用于支撑所述传送带的所述支撑滚轮,所述传送带的运输面上设置有所述缓冲柔性层,所述主转轮、所述从动转轮和所述支撑滚轮的轴心线互相平行,所述出料运输驱动电机和所述送料运输驱动电机均与所述控制中心电连接。
12、进一步地,所述pcb板焊接组件包括第三六轴机器人机械手臂和焊接端头,所述焊接端头设置在所述第三六轴机器人机械手臂的输出部上,所述第三六轴机器人机械手臂的固定部固定设置在所述安装支架上,所述第三六轴机器人机械手臂与所述控制中心电连接。
13、一种计算机pcb板双面焊接设备的焊接方法,所述焊接方法包括以下步骤:
14、s1:在所述pcb板进料运输组件中以堆叠的方式水平放入多个所述计算机pcb板,通过所述第四电动推杆调整最上侧的一个所述计算机pcb板,使得所述计算机pcb板的上表面与所述楔形挤出块的下表面平齐,在所述大元件放置通道中放入可被所述吸取盘抓取的大体积元器件,在所述小元件放置通道中放入可被所述吸取管抓取的小体积元器件,将所述翻转板水平放置,控制所述第三电动推杆移动并将所述限位插销插入到所述限位孔中;
15、s2:通过所述控制中心控制所述第四电动推杆带动所述承重板上移一个所述计算机pcb板厚度的距离,然后控制所述送料运输驱动电机转动,所述送料运输驱动电机通过所述反向转动丝杆同时带动两个所述导向块向所述计算机pcb板侧滑动,所述导向块上的所述楔形挤出块将最上侧的所述计算机pcb板顶出,所述计算机pcb板未脱离所述限位竖板的限制;
16、s3:通过所述控制中心控制所述第一六轴机器人机械手臂和所述夹取驱动电机工作,所述夹取驱动电机通过所述夹取杆上的所述夹取槽夹持在所述计算机pcb板的转角上,夹取后将所述计算机pcb板放置在所述翻转板内,并使所述计算机pcb板上相邻的两个边缘分别与所述第一定位槽和所述第二定位槽接触,然后控制所述第一电动推杆和所述第二电动推杆向前伸出,使得所述第一锁紧槽和所述第二锁紧槽分别夹紧在所述计算机pcb板的边缘上,然后控制所述夹取驱动电机松弛所述计算机pcb板,再通过所述第一六轴机器人机械手臂将所述夹取驱动电机移开至不影响焊接所述计算机pcb板的位置停止;
17、s4:通过所述控制中心控制所述第二六轴机器人机械手臂和所述电磁控制阀工作,将通过所述吸取盘抓取所述大体积元器件或者通过所述吸取管抓取所述小体积元器件并安装到所述计算机pcb板上对应的位置,再控制所述第三六轴机器人机械手臂和所述焊接端头将所述大体积元器件或者所述小体积元器件焊接在所述计算机pcb板上,当所述计算机pcb板的一面焊接完成后,控制所述第二六轴机器人机械手臂和所述第三六轴机器人机械手臂远离所述翻转板,控制所述第三电动推杆移动并将所述限位插销从所述限位孔中拔出,然后控制所述转动驱动电机带动所述翻转板绕所述第一转动轴转动180°,再控制所述第三电动推杆移动并将所述限位插销插入到另一个所述限位孔中,接着控制所述第二六轴机器人机械手臂和所述第三六轴机器人机械手臂工作并对所述计算机pcb板的另一面进行焊接;
18、s5:所述计算机pcb板焊接完成后,控制所述第三电动推杆移动并将所述限位插销从所述限位孔中拔出,然后控制所述转动驱动电机带动所述翻转板绕所述第一转动轴转动180°,再控制所述第三电动推杆移动并将所述限位插销插入到另一个所述限位孔中;
19、s6:通过所述控制中心控制所述第一六轴机器人机械手臂和所述夹取驱动电机夹取所述翻转板中焊接后的所述计算机pcb板,控制所述第一电动推杆和所述第二电动推杆后移并松弛所述计算机pcb板,然后控制所述第一六轴机器人机械手臂和所述夹取驱动电机将焊接后的所述计算机pcb板放置在所述缓冲柔性层上;
20、s7:控制所述出料运输驱动电机工作并将所述计算机pcb板运输到下一道工序;
21、s8:重复所述s2步骤到所述s7步骤;
22、其中,在所述s2步骤与所述s7步骤之间,控制所述送料运输驱动电机反向转动进行复位,并使使得所述楔形挤出块不影响所述计算机pcb板顶出。
23、本发明的有益效果是:
24、1)在本技术中,计算机pcb板双面焊接设备由安装支架、pcb板进料运输组件、pcb板出料运输组件、pcb板抓取组件、pcb板翻转组件、pcb板焊接组件和元件运输摘取组件组成的,整个设备的结构紧凑,可实现对计算机pcb板的双面进行焊接,相比于生产线,本设备占地面积小,可在小型的无尘车间经加工,降低了车间的维护成本,同时也降低了设备的投入成本。
25、2)在pcb板翻转组件中,翻转板上设置第一定位板、第二定位板、第一锁紧板、第二锁紧板、第一电动推杆和第二电动推杆,这样可以在翻转板上夹持多个型号的计算机pcb板,降低计算机pcb板焊接过程中的夹具制造成本。
26、3)在pcb板翻转组件中,设置导电外环、导电内环、导电推头和推头弹簧可以有效的使得导电外环与导电内环之间进行充分的导电,转动驱动电机无论正向转动或者反向转动,无论转动多少圈,导电外环与导电内环之间通过导电推头始终保持充分接触。
27、4)在pcb板抓取组件中,夹取杆上的夹取槽对计算机pcb板的角进行夹取,这样可以有效的防止计算机pcb板从夹取杆上脱离。
28、5)在元件运输摘取组件中,大元件放置通道和小元件放置通道均倾斜设置,当最下侧的元器件被抓取部件从第一抓取口或者第二抓取口抓取后,各个放置通道中的元器件在重力作用下自动滑向下侧,这样可以有效的使得元件存放部件结构得到简化。
29、6)在pcb板出料运输组件中,设置缓冲柔性层可以保证pcb板抓取组件下放焊接后的计算机pcb板时有效的得到缓冲,防止计算机pcb板上焊接的元器件从计算机pcb板上脱落。
- 还没有人留言评论。精彩留言会获得点赞!