一种激光打标机器人自动上下料机构的制作方法
本技术涉及自动上下料机构,具体为一种激光打标机器人自动上下料机构。
背景技术:
1、激光打标机器人自动上下料机构的背景技术主要是利用机器人的灵活性和精确性,结合激光打标系统的高效性和稳定性,实现对各种材料和形状的产品的自动化标识,将待打标的产品放置在上料台上,物料传送至激光打标机下,打标机根据预设的参数和图案对产品进行打标,打标完成后,重复上述过程,直到所有产品都被打标完毕,结束操作。
2、目前,在上料时,物料从上料器掉落在传送带时,散乱的物料在打标时,可能没办法打标在指定位置,可能会导致物料失效,浪费资源、增加了成本;因此,不满足现有的需求,对此我们提出了一种激光打标机器人自动上下料机构。
技术实现思路
1、本实用新型提供了一种激光打标机器人自动上下料机构,具备的有益效果,解决了上述背景技术中所提到在上料时,物料从上料器掉落在传送带时,散乱的物料在打标时,可能没办法打标在指定位置,可能会导致物料失效,浪费资源、增加了成本的问题。
2、本实用新型提供如下技术方案:一种激光打标机器人自动上下料机构,包括支撑板、打标器和传送履带,所述打标器安装在所述支撑板的侧部,所述打标器下方对应设置有传送履带,所述打标器与所述传送履带之间安装有扭轮,所述扭轮安装在所述支撑板的侧部,所述扭轮与所述传送履带配合使用,所述传送履带表面安装有上料板,所述上料板和所述传送履带铰接处安装有扭簧。
3、作为本实用新型所述的一种激光打标机器人自动上下料机构可选方案,其中:所述传送履带内部安装有第一滚轮和第二滚轮,所述第一滚轮、所述第二滚轮与所述传送履带滚动连接,所述传送履带底部安装有支撑架,所述支撑架贴合所述支撑板。
4、作为本实用新型所述的一种激光打标机器人自动上下料机构可选方案,其中:所述上料板设置有多个,多个所述上料板分布在所述传送履带的表面,所述上料板设置为矩形板。
5、作为本实用新型所述的一种激光打标机器人自动上下料机构可选方案,其中:所述上料板底部安装有转销,所述扭簧套设在所述转销外侧,所述扭簧的一端铰接所述上料板,所述扭簧的另一端铰接所述传送履带。
6、作为本实用新型所述的一种激光打标机器人自动上下料机构可选方案,其中:所述扭轮分为第一扭转轮、第二扭转轮和第三扭转轮,所述第一扭转轮、所述第二扭转轮和所述第三扭转轮分别连接在所述支撑板的侧部。
7、作为本实用新型所述的一种激光打标机器人自动上下料机构可选方案,其中:所述第一扭转轮、所述第二扭转轮和所述第三扭转轮侧部分别转动连接有第一挡块、第二挡块和第三挡块,所述第一挡块、所述第二挡块和所述第三挡块表面分别安装有用于清理的毛刷,所述第一挡块、所述第二挡块和所述第三挡块截面设置为梯形。
8、作为本实用新型所述的一种激光打标机器人自动上下料机构可选方案,其中:所述第一挡块、所述第二挡块和所述第三挡块分别设置有两个,两个所述第一挡块、两个所述第二挡块和两个所述第三挡块与传送履带搭配使用。
9、作为本实用新型所述的一种激光打标机器人自动上下料机构可选方案,其中:所述传送履带两侧分别安装有上料器和出料器,所述上料器、出料器与所述传送履带配合使用。
10、本实用新型具备以下有益效果:
11、1、该激光打标机器人自动上下料机构,通过在传送履带上方设置扭轮,当物料从出料器掉落在传送履带时,经过扭轮,第一扭转轮、第二扭转轮和第三扭转轮配合使用,将物料摆正,使得物料在打标时尽可能打标在正确位置,又在扭转轮表面安装毛刷,在移动的过程中,毛刷可以清理物料表面,从而使打标时可以更加清楚,清除产品表面的灰尘和杂质,提高打标的质量和效果。
12、2、该激光打标机器人自动上下料机构,通过在履带上方设置转销,转销上方设置扭簧,扭簧连接上料板,当上料板完成上料传送到扭轮下方时,扭轮压迫上料板,上料板挤压扭簧,使得上料板改变方向,从而顺利完成运动轨迹,扭簧连接可以提供一定的弹性,当发生振动、冲击或变形时,可以缓冲吸收部分能量,减少对连接部件的影响,这有助于保护上料板和扭簧之间的连接,延长其使用寿命。
技术特征:
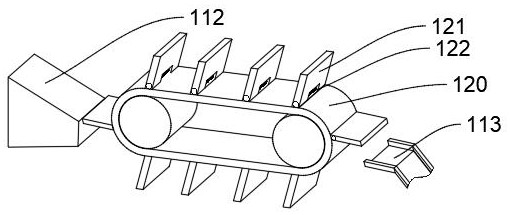
1.一种激光打标机器人自动上下料机构,包括支撑板(110)、打标器(111)和传送履带(120),其特征在于:所述打标器(111)安装在所述支撑板(110)的侧部,所述打标器(111)下方对应设置有传送履带(120),所述打标器(111)与所述传送履带(120)之间安装有扭轮(130),所述扭轮(130)安装在所述支撑板(110)的侧部,所述扭轮(130)与所述传送履带(120)配合使用,所述传送履带(120)表面安装有上料板(121),所述上料板(121)和所述传送履带(120)铰接处安装有扭簧(122)。
2.根据权利要求1所述的一种激光打标机器人自动上下料机构,其特征在于:所述传送履带(120)内部安装有第一滚轮(141)和第二滚轮(142),所述第一滚轮(141)、所述第二滚轮(142)与所述传送履带(120)滚动连接,所述传送履带(120)底部安装有支撑架(143),所述支撑架(143)贴合所述支撑板(110)。
3.根据权利要求1所述的一种激光打标机器人自动上下料机构,其特征在于:所述上料板(121)设置有多个,多个所述上料板(121)分布在所述传送履带(120)的表面,所述上料板(121)设置为矩形板。
4.根据权利要求1所述的一种激光打标机器人自动上下料机构,其特征在于:所述上料板(121)底部安装有转销(123),所述扭簧(122)套设在所述转销(123)外侧,所述扭簧(122)的一端铰接所述上料板(121),所述扭簧(122)的另一端铰接所述传送履带(120)。
5.根据权利要求1所述的一种激光打标机器人自动上下料机构,其特征在于:所述扭轮(130)分为第一扭转轮(131)、第二扭转轮(132)和第三扭转轮(133),所述第一扭转轮(131)、所述第二扭转轮(132)和所述第三扭转轮(133)分别连接在所述支撑板(110)的侧部。
6.根据权利要求5所述的一种激光打标机器人自动上下料机构,其特征在于:所述第一扭转轮(131)、所述第二扭转轮(132)和所述第三扭转轮(133)侧部分别转动连接有第一挡块(134)、第二挡块(135)和第三挡块(136),所述第一挡块(134)、所述第二挡块(135)和所述第三挡块(136)表面分别安装有用于清理的毛刷(137),所述第一挡块(134)、所述第二挡块(135)和所述第三挡块(136)截面设置为梯形。
7.根据权利要求6所述的一种激光打标机器人自动上下料机构,其特征在于:所述第一挡块(134)、所述第二挡块(135)和所述第三挡块(136)分别设置有两个,两个所述第一挡块(134)、两个所述第二挡块(135)和两个所述第三挡块(136)与传送履带(120)搭配使用。
8.根据权利要求1所述的一种激光打标机器人自动上下料机构,其特征在于:所述传送履带(120)两侧分别安装有上料器(112)和出料器(113),所述上料器(112)、出料器(113)与所述传送履带(120)配合使用。
技术总结
本技术涉及自动上下料机构技术领域,且公开了一种激光打标机器人自动上下料机构,包括支撑板、打标器和传送履带,所述打标器安装在所述支撑板的侧部,所述打标器下方对应设置有传送履带,所述打标器与所述传送履带之间安装有扭轮,所述扭轮安装在所述支撑板的侧部,所述扭轮与所述传送履带配合使用,所述传送履带表面安装有上料板,所述上料板底部安装有扭簧;通过在传送履带上方设置扭轮,当物料从出料器掉落在传送履带时,经过扭轮,将物料摆正,使得物料在打标时尽可能打标在正确位置,又在扭转轮表面安装毛刷,在移动的过程中,毛刷可以清理物料表面,清除产品表面的灰尘和杂质,提高打标的质量和效果。
技术研发人员:张华平
受保护的技术使用者:奇遇激光(宁波)有限公司
技术研发日:20230822
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!