一种智能焊接机器人用工件打磨除锈装置的制作方法
1.本实用新型涉及打磨除锈装置技术领域,尤其涉及一种智能焊接机器人用工件打磨除锈装置。
背景技术:
2.打磨,是表面改性技术的一种,一般指借助粗糙物体(含有较高硬度颗粒的砂纸等)来通过摩擦改变材料表面物理性能的一种加工方法,主要目的是为了获取特定表面粗糙度,除锈方法可分:手工除锈,手工除锈速度较慢,效率较低,不实用,化学除锈,利用化学的方法除锈方法效率中等,处理不好可能会造成环境小污染,用酸也可以除锈。
3.现如今大多数打磨除锈操作效率低,在应对不同工件,无法做到彻底打磨除锈作用,且在打磨除锈方向上,通常只是从一个方向进行,无法打磨成平滑的平面。
技术实现要素:
4.本实用新型的目的在于:为了解决上述问题,而提出的一种智能焊接机器人用工件打磨除锈装置。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种智能焊接机器人用工件打磨除锈装置,包括插头,所述插头固定连接有线缆,所述线缆另一端固定连接有夹板,所述夹板之间通过紧固弹簧连接,所述夹板下端固定连接有旋转电机,所述旋转电机一端固定连接有除锈滚轮,所述除锈滚轮另一端固定连接有固定架,所述固定架另一端固定连接有手持杆。
7.作为上述技术方案的进一步描述:
8.所述除锈滚轮设置有两个,两所述除锈滚轮旋转方向相反。
9.作为上述技术方案的进一步描述:
10.所述旋转电机设置有两个,规格相同,固定连接在所述除锈滚轮侧边位置。
11.作为上述技术方案的进一步描述:
12.所述夹板设置有两块,两个所述夹板上端转动连接,由所述紧固弹簧在夹板中心固定连接。
13.作为上述技术方案的进一步描述:
14.所述手持杆与除锈滚轮之间相互平行。
15.作为上述技术方案的进一步描述:
16.所述固定架与夹板之间相互平行,所述固定架之间转动连接。
17.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
18.1、本实用新型采用双向的除锈滚轮,从两个方向对工件进行打磨除锈,相对于传统装置,除锈更彻底,打磨的平面更平滑。
19.2、本实用新型采用可调节角度的夹板,故可以针对不同工件,施加不同的力,来对打磨程度进行改变,具有调节方便,易操作的优势。
附图说明
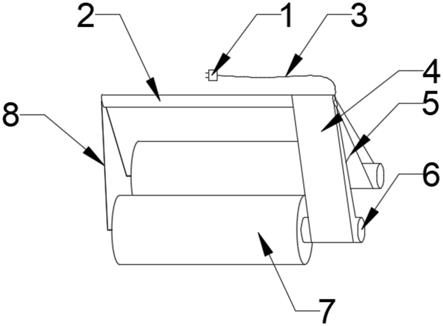
20.图1示出了根据本实用新型实施例提供的智能焊接机器人用工件打磨除锈装置整体结构示意图;
21.图2示出了根据本实用新型实施例提供的打磨除锈装置侧面的结构示意图;
22.图3示出了根据本实用新型实施例提供的打磨除锈装置正面的结构示意图。
23.图例说明:
24.1、插头;2、手持杆;3、线缆;4、夹板;5、紧固弹簧;6、旋转电机;7、除锈滚轮;8、固定架。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
26.请参阅图1-3,本实用新型提供一种技术方案:一种智能焊接机器人用工件打磨除锈装置,包括插头1,插头1固定连接有线缆3,线缆3另一端固定连接有夹板4,夹板4之间通过紧固弹簧5连接,夹板4下端固定连接有旋转电机6,旋转电机6一端固定连接有除锈滚轮7,除锈滚轮7另一端固定连接有固定架8,固定架8另一端固定连接有手持杆2。
27.具体的,如图2所示,除锈滚轮7设置有两个,两除锈滚轮7旋转方向相反,有旋转电机6控制的两个除锈滚轮7从相反方向开始除锈打磨,使得除锈更彻底,打磨的平面更加平滑。
28.具体的,如图2所示,旋转电机6设置有两个,规格相同,固定连接在除锈滚轮7侧边位置,使得除锈滚轮7在相同条件下进行除锈操作,减少因为旋转电机6转速不同,造成工件打磨有缺陷。
29.具体的,如图2所示,夹板4设置有两块,两个夹板4上端转动连接,由紧固弹簧5在夹板4中心固定连接。
30.具体的,如图3所示,手持杆2与除锈滚轮7之间相互平行,确保机器人在除锈时,除锈滚轮7能够平行于工件表面进行除锈打磨。
31.具体的,如图3所示,固定架8与夹板4之间相互平行,固定架8之间转动连接,确保了整个打磨除锈装置的稳定性,使得打磨除锈操作能平滑进行。
32.工作原理:使用时,将插头1插入电源,除锈滚轮7开始以相同的转速旋转,机器人固定手持杆2,采取按压的操作,使得两除锈滚轮7相互分离,并在紧固弹簧5的限制下保持固定结构,水平移动手持杆2,直到完成打磨除锈过程。
33.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种智能焊接机器人用工件打磨除锈装置,包括插头(1),其特征在于,所述插头(1)固定连接有线缆(3),所述线缆(3)另一端固定连接有夹板(4),所述夹板(4)之间通过紧固弹簧(5)连接,所述夹板(4)下端固定连接有旋转电机(6),所述旋转电机(6)一端固定连接有除锈滚轮(7),所述除锈滚轮(7)另一端固定连接有固定架(8),所述固定架(8)另一端固定连接有手持杆(2)。2.根据权利要求1所述的一种智能焊接机器人用工件打磨除锈装置,其特征在于,所述除锈滚轮(7)设置有两个,两所述除锈滚轮(7)旋转方向相反。3.根据权利要求1所述的一种智能焊接机器人用工件打磨除锈装置,其特征在于,所述旋转电机(6)设置有两个,规格相同,固定连接在所述除锈滚轮(7)侧边位置。4.根据权利要求1所述的一种智能焊接机器人用工件打磨除锈装置,其特征在于,所述夹板(4)设置有两块,两个所述夹板(4)上端转动连接,由所述紧固弹簧(5)在夹板(4)中心固定连接。5.根据权利要求1所述的一种智能焊接机器人用工件打磨除锈装置,其特征在于,所述手持杆(2)与除锈滚轮(7)之间相互平行。6.根据权利要求1所述的一种智能焊接机器人用工件打磨除锈装置,其特征在于,所述固定架(8)与夹板(4)之间相互平行,所述固定架(8)之间转动连接。
技术总结
本实用新型公开了一种智能焊接机器人用工件打磨除锈装置,包括插头,插头固定连接有线缆,线缆另一端固定连接有夹板,夹板之间通过紧固弹簧连接,夹板下端固定连接有旋转电机,旋转电机一端固定连接有除锈滚轮,除锈滚轮另一端固定连接有固定架,固定架另一端固定连接有手持杆,除锈滚轮设置有两个,两除锈滚轮旋转方向相反,旋转电机设置有两个,规格相同,固定连接在除锈滚轮侧边位置,夹板设置有两块,两个夹板上端转动连接,由紧固弹簧在夹板中心固定连接,固定架之间转动连接。本实用新型相对于传统装置,除锈更彻底,打磨的平面更平滑,具有调节方便,易操作的优势。易操作的优势。易操作的优势。
技术研发人员:周曙君 赵公元 陈伟鹏
受保护的技术使用者:南京合信自动化有限公司
技术研发日:2021.11.22
技术公布日:2022/4/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1