反重力高温合金调压精铸装备模壳温度补偿装置及方法与流程
1.本发明涉及冶金领域,特别是涉及一种用于反重力高温合金调压精铸装备模壳温度补偿装置及方法。
背景技术:
2.反重力调压铸造装备不同于常规铸造设备,坩埚位于模壳下方,铸造时金属液的流向是反重力方向,即金属液自下而上流动。目前,世界范围内仅存在对反重力调压铸造的各种理论研究,现有技术并不存在能用于生产的反重力调压铸造装备。
3.大型高温合金薄壁铸件对于精密铸造要求相当高,尤其是铸造大型高温合金薄壁铸件。在采用传统铸造设备制造大型高温合金薄壁铸件,会产生薄壁难于成型、微观疏松、大尺寸铸件精度差、成材率较低、稳定性不可控制、严重影响产业能力等缺陷。当下国家航空航天亟待解决高温材料轻量化问题,亟需一种基于反重力铸造理论能够用于生产的反重力调压铸造装备。
4.反重力调压铸造装备在真空条件下,利用使液态金属自坩埚反重力进入铸造模壳,对改善高温合金铸件的薄成型、微观疏松、大尺寸精度差有等缺陷具有显著效果。实际研发中发现,采用反重力精密浇铸工艺对设备要求非常高,大型高温合金薄壁铸件铸造时对于铸造温度要求非常高,特别针对大型复杂薄壁高温合金航空铸件。
5.在铸造大型高温合金薄壁铸件时,模壳需要进行预热然后再转移到模室,在模室内完成浇铸。而在转移的过程中模壳温度会不同程度的下降,无法保证和确知浇铸时的陶瓷模壳的真实温度,造成铸件稳定性无法保证和凝固缺陷,且不利于发现铸件微观质量与陶瓷模壳温度之间的数据机理与理论量化关系。即使采用反重力调压铸造装备也同样存在模壳温度对铸造精度的影响有待解决,模壳温度下降甚至影响科学家和工程师们对反重力凝固规律的发现与工艺优化进程。因此,亟需解决反重力调压浇铸过程中陶瓷模壳温度补偿问题。
技术实现要素:
6.在发明内容部分中引入了一系列简化形式的概念,该简化形式的概念均为本领域现有技术简化,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
7.本发明要解决的技术问题是提供一种能对反重力高温合金调压精铸装备模壳和升液管转移丢失温度进行准确补偿,且能保障金属液在升液管内反重力流动性的反重力高温合金调压精铸装备模壳温度补偿装置。
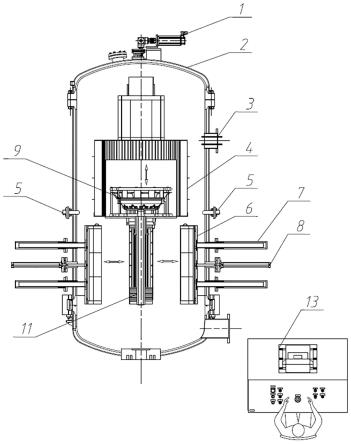
8.为解决上述技术问题,本发明提供的反重力高温合金调压精铸装备模壳温度补偿装置,包括:第一动力源1,其固定连接在模室2顶部,且与模室2形成动密封,其能同步驱动两
组传动组件10;两组传动组件10,对称分布在模室2内侧壁上;升降固定架12,其固定在两组传动组件10之间,其能沿着两组传动组件10上下移动;第一保温结构4,其固定在模室2内并通过电缆3与外部电源连接,其能根据上位机13指令对其内部空间进行加热保温;第二保温结构6,形成为两半式管状结构,其两半结构能预粘帖于升液管11外侧,其两半结构分别由两个水平驱动装置8驱动能实现分开或闭合,其两半结构闭合时套装在升液管11外侧,其两半结构分开时升降固定架12能穿过;两个水平驱动装置8,对称分布在模室2内侧壁上,且与模室2形成动密封;模壳9,其被夹持在升降固定架12上;升液管11,其一端连接在模壳9底部,另一端连接外部熔炼室;上位机13,其设置在反重力调压精密浇铸装备旁,用于控制第二保温结构6和升降固定架12动作。
9.对于精确的控制第二保温结构6和升降固定架12动作进一步说明至少可以有以下实现的方式,下述方式也可以结合使用;1、在第一动力源1和水平驱动装置8中配置位移编码器实时采集和反馈运行参数,并将运行参数发送至上位机13,进而能够实时获得第二保温结构6和升降固定架12准确的位置。
10.2、在模室内壁设置光栅传感器5,光栅传感器5固定在模室2内,光栅传感器5的发射极和接收极呈180度对称分布,其用于实时对第二保温结构6和升降固定架12位移定位,将定位数据发送至上位机13进而能够实时获得第二保温结构6和升降固定架12准确的位置。
11.可选择的,进一步改进所述反重力高温合金调压精铸装备模壳温度补偿装置,第一动力源1是伺服同步驱动装置。
12.可选择的,进一步改进所述反重力高温合金调压精铸装备模壳温度补偿装置,传动组件10是螺杆式直线导轨,一旦陶瓷模壳就位,具有自锁特性。
13.可选择的,进一步改进所述反重力高温合金调压精铸装备模壳温度补偿装置,两组传动组件10和两个水平驱动装置8均呈180度对称分布在模室2内侧壁上。
14.可选择的,进一步改进所述反重力高温合金调压精铸装备模壳温度补偿装置,升降固定架12具有石墨高温隔离层。
15.可选择的,进一步改进所述反重力高温合金调压精铸装备模壳温度补偿装置,执行加热保温时,第一动力源1驱动升降固定架12向上移动,光栅传感器5探测到模壳9位于第一保温结构4中达到第一指定位置后发送信号至上位机13,上位机13使两个水平驱动装置8驱动第二保温结构6的两半结构闭合套装在升液管11外侧启动第二保温结构6进行加热保温。
16.可选择的,进一步改进所述反重力高温合金调压精铸装备模壳温度补偿装置,执行浇铸时,上位机13使第二保温结构6停止加热保温,使两个水平驱动装置8驱动第二保温结构6的两半结构分开达到并靠近模室2内侧壁达到第二指定位置;
第一动力源1驱动升降固定架12向下移动,光栅传感器5探测到升液管11达到第三指定位置后发送信号至上位机13,上位机13控制外部熔炼室启动浇铸。
17.可选择的,进一步改进所述反重力高温合金调压精铸装备模壳温度补偿装置,执行保温和执行浇铸时,模室2内填充惰性气体,且模室2与外部熔炼室具有压力差,外部熔炼室压力高于模室2压力。
18.为解决上述技术问题,本发明提供一种上述任意一项所述反重力高温合金调压精铸装备模壳温度补偿装置的反重力高温合金调压精铸装备模壳温度补偿方法,包括以下步骤:s1,对预加热模壳和升液管达到指定温度;s2,将模壳和升液管转运至模室,关闭模室,模壳在升降固定架就位后通过第一动力源同步驱动两组传动组件使模壳位于第一保温结构中,对模室抽真空进行使第一保温结构加热进行温度补偿;s3,通过上位机进行补偿温度pid控制,达到工艺设定温度值;s4,外部熔炼室和模室填充惰性气体,建立惰性气体压力差,外部熔炼室压力高于模室压力,直至达到浇铸工艺设计的压力差,开始浇铸。
19.本发明工作原理如下:对于传统铸造设备,陶瓷模壳的温度对大型复杂薄壁铸件凝固结晶至关重要,失温从会影响薄壁铸件的充型完整性和凝固的微观组织品质。
20.而对于反重力高温合金调压精铸装备失温度造成的影响更为严重,因为反重力调压铸造装备进行精密铸造大型复杂铸件时,液态金属自熔炼室坩埚内被压向上方的高温陶瓷模壳,一旦失温会影响液态金属瞬时的反重力流动性,造成更为严重的工艺偏差。并且,反重力高温合金调压精铸装备除了要考虑模壳失温造成的影响之外,还要考虑升液管失温造成的影响(现有铸造设备并不存在升液管),在升液管内保障反重力流动性尤其重要。
21.本发明竖直传动部分采用伺服同步驱动和精密导轨且与模室形成动密封,水平传动部分的两个水平驱动装置示例性的采用水平导向装置和气缸且与模室形成动密封,进而在实现模壳、升液管、第一保温结构和第二保温结构动作的同时保障了模室的密封性,为反重力调压精铸建立压力差提供了必要条件,避免在压力差的作用下产生机构位置偏移而导致气密失败。本发明第一保温结构可选择采用合金电阻丝形式,能够很好的适应在大气、真空和充氩气的环境里进行工作,温度控制精准,误差正负1℃以内,通过温度传感器反馈信息,上位机pid实时跟随控制。需要说明的是对于补偿的温度可以有多种控制方式,例如实时采集温度传输至上位机,上位机控制加热温度补偿。当然,也可以通过标定的方式,直接调取标定的数据进行加热温度补偿。
22.本发明通过对陶瓷模壳与升液管在模室真空环境下进行原位自动温度补偿,能确保模壳温度的真实性,提高铸件质量和合格率。本发明能保障重力高温合金调压精铸装备铸造时温度为设计工艺温度,解决由于失温度造成的薄壁铸件充型完整性和凝固微观组织品质差的缺陷。避免由于失温对液态金属瞬时的反重力流动性的影响,保障铸造工艺质量。并,能为高温合金反重力铸件工艺提供温度量化依据,有利于工艺优化和研发。
附图说明
23.本发明附图旨在示出根据本发明的特定示例性实施例中所使用的方法、结构和/或材料的一般特性,对说明书中的描述进行补充。然而,本发明附图是未按比例绘制的示意图,因而可能未能够准确反映任何所给出的实施例的精确结构或性能特点,本发明附图不应当被解释为限定或限制由根据本发明的示例性实施例所涵盖的数值或属性的范围。下面结合附图与具体实施方式对本发明作进一步详细的说明:图1是本发明结构示意图一,显示加热保温工况的设备中间状态。
24.图2是本发明结构示意图二,显示浇铸工况的设备状态。
25.附图标记说明第一动力源1模室2外部电源3第一保温结构4光栅传感器5第二保温结构6导向装置7水平驱动装置8模壳9传动组件10升液管11升降装置12上位机13。
具体实施方式
26.以下通过特定的具体实施例说明本发明的实施方式,本领域技术人员可由本说明书所公开的内容充分地了解本发明的其他优点与技术效果。本发明还可以通过不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点加以应用,在没有背离发明总的设计思路下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。本发明下述示例性实施例可以多种不同的形式来实施,并且不应当被解释为只限于这里所阐述的具体实施例。应当理解的是,提供这些实施例是为了使得本发明的公开彻底且完整,并且将这些示例性具体实施例的技术方案充分传达给本领域技术人员。
27.第一实施例;本发明提供一种反重力高温合金调压精铸装备模壳温度补偿装置,包括:第一动力源1,本实施例选择伺服同步驱动电机,其固定连接在模室2顶部,且与模室2形成动密封,需要说明的是反重力高温合金调压精铸装备的模室2是密封环境,其能同步驱动两组传动组件10,其具有位移编码器实时采集和反馈运行参数,并将运行参数发送至上位机13;两组传动组件10,本实施例选择传动组件10是螺杆式直线导轨,对称分布在模室2
内侧壁上,例如呈180度对称分布;升降固定架12,其固定在两组传动组件10之间,其能沿着两组传动组件10上下移动,对称分布在模室2内侧壁上,例如呈180度对称分布;优选的,在升降固定架12上形成石墨高温隔离层;第一保温结构4,可选择的其形成为倒置的桶状结构,其固定在模室2内并通过电缆3与外部电源3连接,其能根据上位机13指令对其内部空间进行加热保温;第二保温结构6,形成为两半式管状结构,其两半结构分别由两个水平驱动装置8驱动能实现分开或闭合,其两半结构闭合时套装在升液管11外侧,其两半结构分开时升降固定架12能穿过,即升液管11能下移到浇铸位置;执行加热保温时,可选择将第二保温结构6的两半结构能预粘帖于升液管11外侧;两个水平驱动装置8,对称分布在模室2内侧壁上,且与模室2形成动密封;示例性的,水平驱动装置8采用气缸并通过水平导向装置7保障水平运动;模壳9,其被夹持在升降固定架12上;升液管11,其一端连接在模壳9底部,另一端连接外部熔炼室;光栅传感器5,其固定在模室2内侧壁,其用于实时对升降固定架12位移定位,将定位数据发送至上位机13;光栅传感器5,其成对180度分布,其中一个发射极和一个接收极,实时对陶瓷模壳4精确位移定位5上位机13,其设置在反重力调压精密浇铸装备旁,用于控制第二保温结构6和升降固定架12动作。
28.基于上述实施例,对本发明工作过程进一步限定如下;执行加热保温时,第一动力源1驱动升降固定架12向上移动,光栅传感器5探测到模壳9位于第一保温结构4中达到第一指定位置后发送信号至上位机13,上位机13使两个水平驱动装置8驱动第二保温结构6的两半结构闭合套装在升液管11外侧启动第二保温结构6进行加热保温。
29.执行浇铸时,上位机13使第二保温结构6停止加热保温,使两个水平驱动装置8驱动第二保温结构6的两半结构分开达到并靠近模室2内侧壁达到第二指定位置;第一动力源1驱动升降固定架12向下移动,光栅传感器5探测到升液管11达到第三指定位置后发送信号至上位机13,上位机13控制外部熔炼室启动浇铸。
30.执行保温和执行浇铸时,模室2内填充惰性气体,例如氩气,且模室2与外部熔炼室具有压力差,外部熔炼室压力高于模室2压力。
31.第二实施例;本发明提供一种利用所述反重力高温合金调压精铸装备模壳温度补偿装置的反重力高温合金调压精铸装备模壳温度补偿方法,包括以下步骤:s1,对预加热模壳和升液管达到指定温度;需要说明的是,预加热可以在大气环境中进行,例如预加热到800℃。
32.s2,在大气环境中将模壳和升液管转运至模室,关闭模室,模壳在升降固定架就位后通过第一动力源同步驱动两组传动组件使模壳位于第一保温结构中,对模室抽真空进行使第一保温结构加热进行温度补偿;
s3,通过上位机进行补偿温度pid控制,达到工艺设定温度值;s4,外部熔炼室和模室填充惰性气体,建立惰性气体压力差,外部熔炼室压力高于模室压力,直至达到浇铸工艺设计的压力差,开始浇铸。
33.除非另有定义,否则这里所使用的全部术语(包括技术术语和科学术语)都具有与本发明所属领域的普通技术人员通常理解的意思相同的意思。还将理解的是,除非这里明确定义,否则诸如在通用字典中定义的术语这类术语应当被解释为具有与它们在相关领域语境中的意思相一致的意思,而不以理想的或过于正式的含义加以解释。
34.以上通过具体实施方式和实施例对本发明进行了详细的说明,但这些并非构成对本发明的限制。在不脱离本发明原理的情况下,本领域的技术人员还可做出许多变形和改进,这些也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1