一种污水循环式地面水磨研磨机器人及其使用方法与流程
本申请涉及地坪施工,更具体地说,涉及一种污水循环式地面水磨研磨机器人及其使用方法。
背景技术:
1、地坪研磨是指混凝土/石材/水磨石/环氧地面的研磨处理,有效打磨水磨石、混凝土表层及环氧砂浆层和旧的环氧地面等,使地坪表面清洁、亮丽、更加平滑,从而提高地坪的美观程度,常用的地坪研磨工具有地坪研磨机、高抛机等相关设备;
2、现有技术公开号为cn115157038a的文献提供一种污水循环式地面水磨研磨机器人,该装置通过电磁阀控制pac及pam溶剂箱内的pac溶剂和pam溶剂流入沉淀箱,与污水充分混合,对污水进行絮凝和分层,再打开水阀,流入过滤箱,固液分离的污水通过过滤箱的滤网,使得污泥被过滤出来便于打包回收,而被过滤后的水通过水泵被送到喷淋结构,实现水循环。
3、上述中的现有技术方案虽然通过现有技术的结构可以实现与关的有益效果,但是仍存在以下缺陷;该装置通过聚丙烯酰胺对污水进行凝絮和分层,聚丙烯酰胺是一种线型高分子聚合物,因其具有良好的絮凝性和助凝性,pam有一个缺点:那就是溶解时间长。常规阴离子或者阳离子聚丙烯酰胺通常需要约40-60分钟的搅拌时间才能使粉末充分溶解。该装置再利用聚丙烯酰胺对污水进行处理时,由于时间过长,不便于对污水进行实时的处理,导致需要暂停后进行污水处理后才能进行研磨,导致其施工效率较低,
4、鉴于此,我们提出一种污水循环式地面水磨研磨机器人。
技术实现思路
1、1.要解决的技术问题
2、本申请的目的在于提供一种污水循环式地面水磨研磨机器人,解决了上述背景技术中提出的技术问题,实现了实时对污水进行过滤处理,提高施工效率的技术效果。
3、2.技术方案
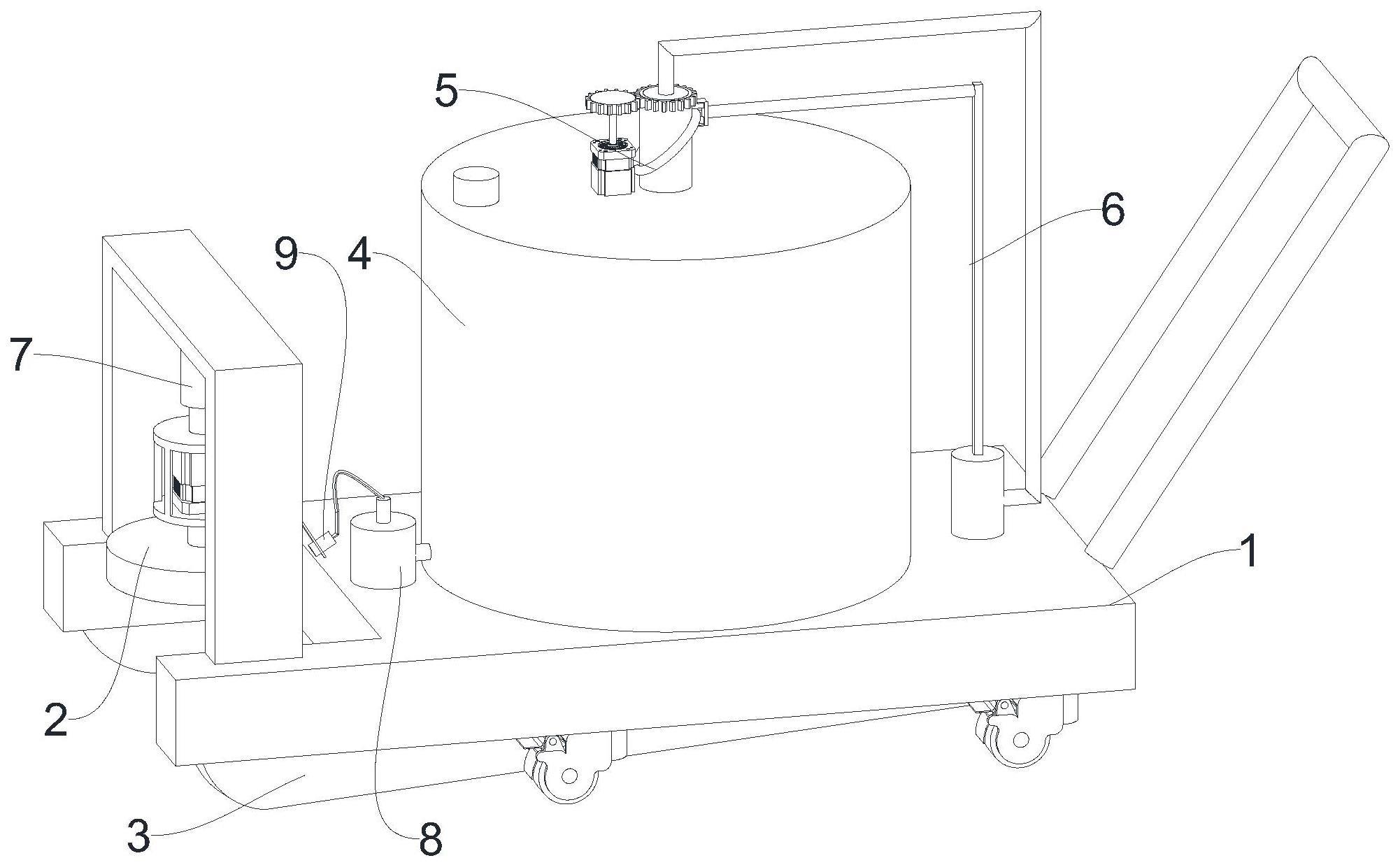
4、本申请实施例提供了一种污水循环式地面水磨研磨机器人,包括:底座、研磨头、导水机构、污水循环处理箱、电推杆、污水处理机构及吸水机构,
5、所述底座上方固定设置有电推杆;
6、电推杆的活动杆下端连接固定设置有研磨头;导水机构滑动配合设置于底座底部;污水循环处理箱连接固定设置于底座上方;污水处理机构转动连接设置于污水循环处理箱上方,可以实现不断的进行污水的循环处理;
7、吸水机构连接固定设置于底座上方。吸水机构通过管路与污水处理机构相连通;
8、作为本申请文件技术方案的一种可选方案,所述导水机构包括导水板和弹簧,所述导水板呈v型结构设置,所述导水板上连接固定设置有多个弹簧,所述弹簧另一端与底座内壁连接固定设置。
9、通过采用上述技术方案,可以通过导水机构对研磨过程中的污水进行收集。
10、作为本申请文件技术方案的一种可选方案,所述污水处理机构包括导水管、环形齿条、滤网和清理管,所述导水管与污水循环处理箱上贯穿转动连接设置,所述导水管位于污水循环处理箱外的一端连接固定设置有环形齿条。
11、所述导水管位于污水循环处理箱内的一端中部内壁连接固定设置有滤网,所述导水管中部内壁密封滑动配合设置有清理管,所述清理管一端连接固定设置有密封盖。
12、通过采用上述技术方案,进入到导水管内的污水在经过滤网时会将其内部的泥沙进行过滤。
13、作为本申请文件技术方案的一种可选方案,所述污水循环处理箱上连接固定设置有电机,所述污水循环处理箱输出端连接固定设置有驱动轮,所述驱动轮与环形齿条啮合传动设置。
14、通过采用上述技术方案,使得电机带动驱动轮转动,然后驱动轮会带动环形齿条连接的导水管进行转动。
15、作为本申请文件技术方案的一种可选方案,所述清理管的一端连接固定设置有导向杆;所述污水循环处理箱内连接固定设置有导向槽,所述导向槽内壁与导向杆外壁滑动配合设置。
16、通过采用上述技术方案,导水管转动时,导向杆会在导向槽的作用下带动连接的清理管进行移动。
17、作为本申请文件技术方案的一种可选方案,所述导水管靠近密封盖的一端底部内壁螺纹连接设置有泥沙收集斗,所述导水管底部两端内壁均螺纹连接设置有滤芯管。
18、通过采用上述技术方案,清理管会对导水管进行暂时的封闭,然后将滤网上的泥沙推到泥沙收集斗内,从而保证滤网的过滤效果。
19、作为本申请文件技术方案的一种可选方案,所述吸水机构包括吸水管和吸水罩,所述吸水管输入端通过管道穿过底座延伸至下部并连接固定设置有吸水罩,所述吸水管输出端通过管道与导水管上端贯穿转动连接设置。
20、作为本申请文件技术方案的一种可选方案,所述吸水管内壁贯穿滑动配合设置有拉压塞,所述拉压塞另一端连接固定设置有滑轮座;所述导水管位于污水循环处理箱外的一端外壁连接固定设置有椭圆导环,所述椭圆导环外壁与滑轮座内的滑轮外壁滑动接触设置。
21、通过采用上述技术方案,导水管进行转动,然后导水管上的椭圆导环在转动时会带动滑轮座连接的拉压塞实现往复移动。
22、本发明提供一种污水循环式地面水磨研磨机器人的使用方法,包括以下步骤:
23、s1、在对地面进行水磨研磨时,将装置推到需要的位置,首先在污水循环处理箱内注入适量的水,然后利用电推杆带动连接的研磨头与地面接触进行研磨,此时利用泵体将污水循环处理箱内的水抽吸到喷头,然后喷到研磨头处进行促进研磨;
24、s2、推动装置进行移动,此时研磨用的水会被导水板收集到一端,然后启动电机,使得电机带动驱动轮转动,然后驱动轮会带动环形齿条连接的导水管进行转动,然后导水管上的椭圆导环在转动时会带动滑轮座连接的拉压塞实现往复移动,然后通过负压使得吸水罩将污水抽吸到吸水管内,然后挤压到导水管内;
25、s3、进入到导水管内的污水在经过滤网时会将其内部的泥沙进行过滤,然后污水会进入到滤芯管内进行二次过滤,此时转动的导水管会产生离心力,从而可以使得滤芯管内的水可以快速排出,提高过滤效果;
26、s4、当导水管转动时,导向杆会在导向槽的作用下带动连接的清理管进行移动,清理管会对导水管进行暂时的封闭,然后密封盖将滤网上的泥沙推到泥沙收集斗内,从而保证滤网的过滤效果;
27、s5、然后泵体可以将污水循环处理箱内处理后的污水抽吸到喷头,再喷到研磨头进行循环使用。
28、3.有益效果
29、本申请实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
30、1.本申请由于采用污水处理机构实现了在进行地面研磨时,利用离心力可以实现实时的对污水进行过滤处理,不需要暂停装置进行过滤,从而可以提高装置的施工效率的效果。
31、2.本申请通过在导水管内设置清理管,可以在进行离心过滤的同时,可以带动清理管进行往复移动,从而可以对滤网进行实时的清理,保证滤网的过滤效果。
32、3.本申请通过设置吸水机构,可以在污水处理的同时可以将污水进行收集,实现装置的自动化效果,同时通过设置带有弹簧的导水板,使得导水板可以抵在地面上,便于对污水进行集中,便于收集。
技术特征:
1.一种污水循环式地面水磨研磨机器人,包含:底座、研磨头、导水机构、污水循环处理箱、污水处理机构、电推杆及吸水机构,其特征在于:所述底座上方固定设置电推杆;电推杆的活动杆下端连接固定设置有研磨头;
2.根据权利要求1所述的污水循环式地面水磨研磨机器人,其特征在于:所述导水机构包括导水板和弹簧,所述导水板呈v型结构设置,所述导水板上连接固定设置有多个弹簧,所述弹簧另一端与底座内壁连接固定设置。
3.根据权利要求1所述的污水循环式地面水磨研磨机器人,其特征在于:所述污水处理机构包括导水管、环形齿条、滤网和清理管,所述导水管与污水循环处理箱上贯穿转动连接设置,所述导水管位于污水循环处理箱外的上端固定设置有环形齿条;所述导水管位于污水循环处理箱内的一端内壁固定设置有滤网,所述导水管中部内壁滑动配合设置有清理管,所述清理管一端连接固定设置有密封盖。
4.根据权利要求3所述的污水循环式地面水磨研磨机器人,其特征在于:所述污水循环处理箱上连接固定设置有电机,所述污水循环处理箱输出端连接固定设置有驱动轮,所述驱动轮与环形齿条啮合传动设置。
5.根据权利要求3所述的污水循环式地面水磨研磨机器人,其特征在于:所述导水板呈v型结构设置,导水板一侧两端呈弧型结构设置。
6.根据权利要求3所述的污水循环式地面水磨研磨机器人,其特征在于:所述清理管的一端连接固定设置有导向杆;
7.根据权利要求3所述的污水循环式地面水磨研磨机器人,其特征在于:所述导水管靠近密封盖的一端底部内壁螺纹连接设置有泥沙收集斗,所述导水管底部两端内壁均螺纹连接设置有滤芯管。
8.根据权利要求7所述的污水循环式地面水磨研磨机器人,其特征在于:所述吸水机构包括吸水管和吸水罩,所述吸水管输入端通过管道穿过底座延伸至下部并连接固定设置有吸水罩,所述吸水管输出端通过管道与导水管上端贯穿转动连接设置。
9.根据权利要求8所述的污水循环式地面水磨研磨机器人,其特征在于:所述吸水管内壁贯穿滑动配合设置有拉压塞,所述拉压塞另一端连接固定设置有滑轮座;
10.一种污水循环式地面水磨研磨机器人的使用方法,其特征在于包括以下步骤:
技术总结
本发明涉及地坪施工技术领域,具体公开了一种污水循环式地面水磨研磨机器人,包括:底座、研磨头、导水机构、污水循环处理箱、污水处理机构、电推杆及吸水机构;底座上通过电推杆连接固定设置有研磨头;导水机构滑动配合设置于底座底部;污水循环处理箱连接固定设置于底座上;污水处理机构转动连接设置于污水循环处理箱上,可以实现不断的进行污水的循环处理,吸水机构连接固定设置于底座一侧;吸水机构通过管路与污水处理机构连通。本发明采用了污水处理机构技术手段,实现了在进行地面研磨时,利用离心力可以实现实时的对污水进行过滤处理,不需要暂停装置进行过滤,从而可以提高装置的施工效率的效果。
技术研发人员:张群,杜银贵
受保护的技术使用者:张群
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!