一种叶片内表面错层打磨机器人及打磨方法与流程
本发明属于风电叶片,具体涉及一种叶片内表面错层打磨机器人及打磨方法。
背景技术:
1、风力发电机的叶片尺寸长达几十米,生产过程包括有通过特定设备将胶体进行真空脱泡、恒温混合,灌注到模具当中并经加热后固化。风电叶片生产时先生产半边,再将两个半边合起来后粘接形成完整的风电叶片。风电叶片的表面质量决定使用寿命的长短,在灌筑完成后,叶片的外表面和内表面都会出现一些错层缺陷,需要对缺陷的地方进行打磨,进行二次修复。叶片内表面的错层缺陷修复是在两个半边粘接前进行,由于叶片尺寸太大,叶片内部构造复杂,传统的人工打磨对工人的打磨水平要求高,耗时长,质量无法保证,且打磨过程中产生的粉尘污染大。因此,需要针对风电叶片内表面的特点设计一种能够适应叶片内表面,对叶片内表面错层进行自动打磨并且能够保证打磨精度的自动打磨设备。
技术实现思路
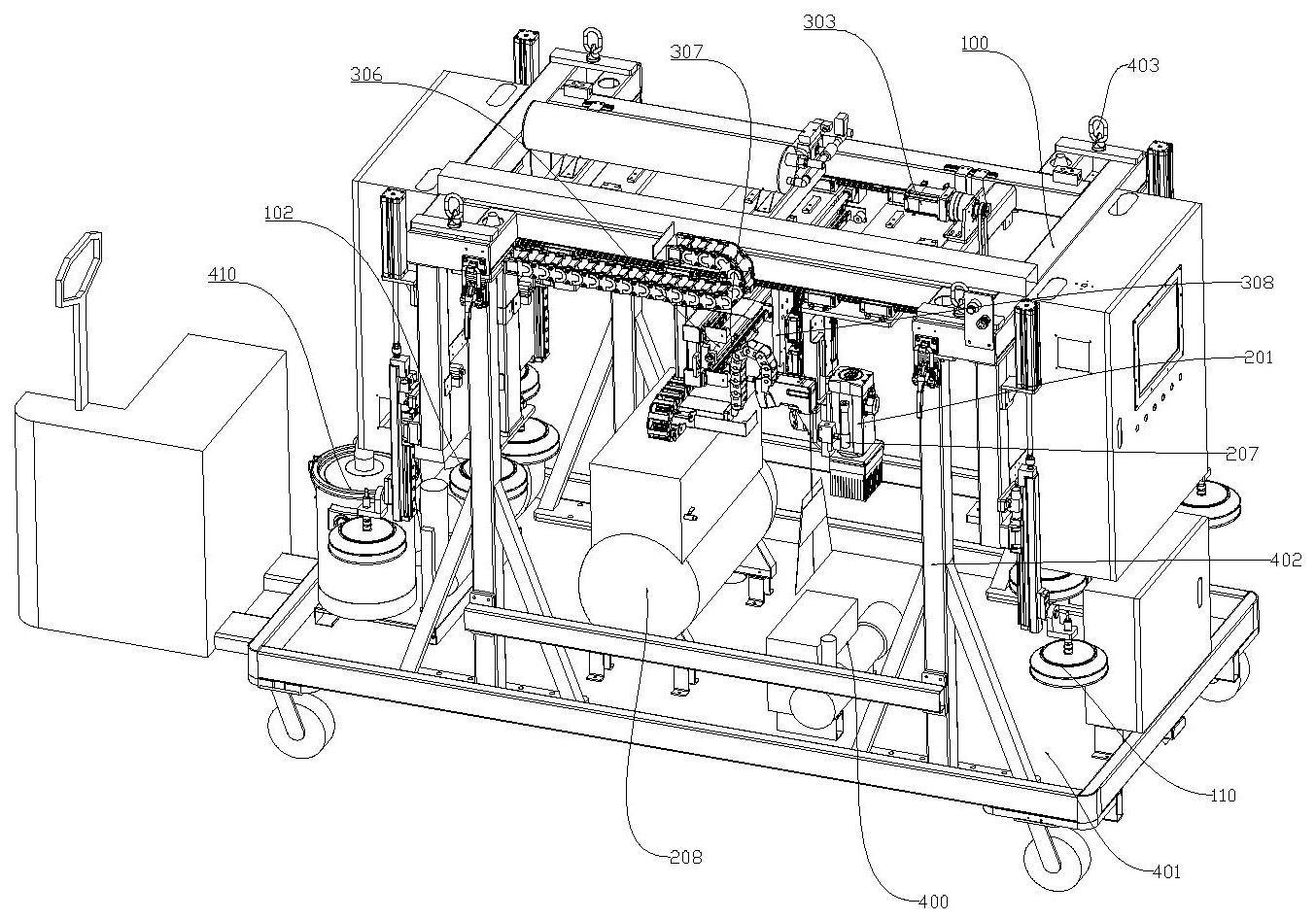
1、为解决上述技术问题,本发明采用的技术方案是:一种叶片内表面错层打磨机器人,包括有框架、吸盘定位装置、四轴运动平台、打磨机构、激光扫描定位机构;
2、所述吸盘定位装置包括有位于框架两端的主立柱,主立柱的上端固定连接框架,主立柱的下端安装有若干中间吸盘,所述主立柱的两侧分别设有若干副立柱,副立柱的上端分别固定连接框架,副立柱上安装有导轨和伸缩气缸,导轨竖直设置,伸缩气缸位于导轨上方,导轨上配合安装有滑块,伸缩气缸连接滑块并驱动滑块在导轨上移动,滑块的下端设有摆动连接座,摆动连接座包括有竖板和横板,横板固定连接竖板的下端,竖板通过摆动轴可转动的连接滑块,横板上安装有辅助吸盘;
3、所述四轴运动平台包括有x轴移动机构、y轴移动机构、z轴移动机构、r轴摆动机构,所述x轴移动机构驱动y轴移动机构在x轴方向移动,所述y轴移动机构驱动z轴移动机构在z轴方向移动,所述z轴移动机构驱动r轴摆动机构在z轴方向移动,所述r轴摆动机构驱动打磨机构在竖直面上摆动;
4、所述打磨机构包括有固定安装板、打磨电机、打磨铣刀,打磨电机固定安装在固定安装板上,打磨电机驱动打磨铣刀转动;
5、激光扫描定位机构包括有激光传感器和电路模块,电路模块连接并控制四轴运动平台运行,所述激光传感器安装在固定安装板上。
6、作为上述技术方案的优选,所述固定安装板上连接由水平折弯部,水平折弯部上设有供打磨电机的转轴活动穿过的通孔,打磨电机的转轴穿过通孔后连接打磨铣刀,打磨铣刀的四周设有防尘挡板,防尘挡板连接水平折弯部。
7、作为上述技术方案的优选,所述水平折弯部上设有吸尘口,吸尘口通过管道连接吸尘器。
8、作为上述技术方案的优选,所述水平折弯部上设有吹气冷凝口,吹气冷凝口通过吹气冷凝管连接空压机,所述空压机给伸缩气缸供气。
9、作为上述技术方案的优选,还包括有真空泵,所述辅助吸盘和中间吸盘分别通过气管连接真空泵。
10、作为上述技术方案的优选,所述x轴移动机构包括有x轴移动框架、x轴丝杆、x轴滑轨、x轴移动电机和x轴移动安装板,x轴丝杆可转动的安装在x轴移动框架上,x轴滑轨设于x轴移动框架上,x轴移动安装板安装在x轴滑轨上,x轴移动电机驱动x轴丝杆转动,x轴丝杆上配合安装有x轴丝杆螺母,x轴丝杆螺母固定连接x轴移动安装板;所述y轴移动机构包括有y轴移动框架、y轴丝杆、y轴滑轨、y轴移动电机和y轴移动安装板,y轴移动框架固定连接x轴移动安装板,y轴丝杆可转动的安装在y轴移动框架上,y轴滑轨设于y轴移动框架上,y轴移动安装板安装在y轴滑轨上,y轴移动电机驱动y轴丝杆转动,y轴丝杆上配合安装有y轴丝杆螺母,y轴丝杆螺母固定连接y轴移动安装板;z轴移动机构包括有z轴移动框架、z轴滑轨、z轴移动电缸和z轴移动安装板,z轴移动框架固定连接y轴移动安装板,z轴滑轨设于z轴移动框架上,z轴移动安装板安装在z轴滑轨上,z轴移动电缸驱动z轴移动安装板在z轴滑轨上移动;r轴摆动机构包括有r轴摆动电机,r轴摆动电机安装在z轴移动安装板上,r轴摆动电机驱动固定安装板摆动。
11、作为上述技术方案的优选,还包括有小车,小车上设有若干支撑杆,所述框架置于支撑杆上,所述框架上设有若干吊耳。
12、叶片内表面错层打磨方法,使用上述叶片内表面错层打磨机器人,打磨方法包括:将框架吊起放入叶片内表面需要打磨加工位置;框架放下,使得中间吸盘与叶片内表面接触并吸附在叶片内表面上;伸缩气缸驱动辅助吸盘下降,辅助吸盘摆动角度后自动适应叶片内表面并吸附在叶片内表面上;四轴运动平台驱动激光传感器移动,对叶片内表面进行扫描,根据扫描结果得到需要打磨加工的缺陷部位的准确位置信息;四轴运动平台根据需要打磨加工部位的准确位置信息对缺陷部位进行打磨;打磨完成后四轴运动平台复位,辅助吸盘和中间吸盘先后脱离叶片表面,打磨机器人被吊至下一缺陷部位。
13、本发明的有益效果是:本发明的叶片内表面错层打磨机器人及打磨方法,通过吸盘定位装置使得打磨机器人可以很好的适应叶片表面,能够稳定地将整个框架与叶片保持固定,确保打磨过程中打磨作用力稳定,保证内错层的打磨质量;通过四轴运动平台和激光扫描定位机构的配合,可以快速有效的对内错层进行定位,提高打磨机器人对内错层打磨的精准性;利用吸尘器可以将打磨过程中产生的灰尘快速吸走收集,避免打磨产生的灰尘影响车间环境。
技术特征:
1.一种叶片内表面错层打磨机器人,其特征在于,包括有框架、吸盘定位装置、四轴运动平台、打磨机构、激光扫描定位机构;
2.如权利要求1所述的叶片内表面错层打磨机器人,其特征在于,所述固定安装板上连接由水平折弯部,水平折弯部上设有供打磨电机的转轴活动穿过的通孔,打磨电机的转轴穿过通孔后连接打磨铣刀,打磨铣刀的四周设有防尘挡板,防尘挡板连接水平折弯部。
3.如权利要求2所述的叶片内表面错层打磨机器人,其特征在于,所述水平折弯部上设有吸尘口,吸尘口通过管道连接吸尘器。
4.如权利要求2所述的叶片内表面错层打磨机器人,其特征在于,所述水平折弯部上设有吹气冷凝口,吹气冷凝口通过吹气冷凝管连接空压机,所述空压机给伸缩气缸供气。
5.如权利要求1所述的叶片内表面错层打磨机器人,其特征在于,还包括有真空泵,所述辅助吸盘和中间吸盘分别通过气管连接真空泵。
6.如权利要求1所述的叶片内表面错层打磨机器人,其特征在于,所述x轴移动机构包括有x轴移动框架、x轴丝杆、x轴滑轨、x轴移动电机和x轴移动安装板,x轴丝杆可转动的安装在x轴移动框架上,x轴滑轨设于x轴移动框架上,x轴移动安装板安装在x轴滑轨上,x轴移动电机驱动x轴丝杆转动,x轴丝杆上配合安装有x轴丝杆螺母,x轴丝杆螺母固定连接x轴移动安装板;所述y轴移动机构包括有y轴移动框架、y轴丝杆、y轴滑轨、y轴移动电机和y轴移动安装板,y轴移动框架固定连接x轴移动安装板,y轴丝杆可转动的安装在y轴移动框架上,y轴滑轨设于y轴移动框架上,y轴移动安装板安装在y轴滑轨上,y轴移动电机驱动y轴丝杆转动,y轴丝杆上配合安装有y轴丝杆螺母,y轴丝杆螺母固定连接y轴移动安装板;z轴移动机构包括有z轴移动框架、z轴滑轨、z轴移动电缸和z轴移动安装板,z轴移动框架固定连接y轴移动安装板,z轴滑轨设于z轴移动框架上,z轴移动安装板安装在z轴滑轨上,z轴移动电缸驱动z轴移动安装板在z轴滑轨上移动;r轴摆动机构包括有r轴摆动电机,r轴摆动电机安装在z轴移动安装板上,r轴摆动电机驱动固定安装板摆动。
7.如权利要求5所述的叶片内表面错层打磨机器人,其特征在于,还包括有小车,小车上设有若干支撑杆,所述框架置于支撑杆上,所述框架上设有若干吊耳。
8.叶片内表面错层打磨方法,其特征在于,使用如权利要求1-7中任意一项所述的叶片内表面错层打磨机器人,打磨方法包括:将框架吊起放入叶片内表面需要打磨加工位置;框架放下,使得中间吸盘与叶片内表面接触并吸附在叶片内表面上;伸缩气缸驱动辅助吸盘下降,辅助吸盘摆动角度后自动适应叶片内表面并吸附在叶片内表面上;四轴运动平台驱动激光传感器移动,对叶片内表面进行扫描,根据扫描结果得到需要打磨加工的缺陷部位的准确位置信息;四轴运动平台根据需要打磨加工部位的准确位置信息对缺陷部位进行打磨;打磨完成后四轴运动平台复位,辅助吸盘和中间吸盘先后脱离叶片表面,打磨机器人被吊至下一缺陷部位。
技术总结
本发明公开了一种叶片内表面错层打磨机器人及打磨方法,打磨机器人包括有框架、吸盘定位装置、四轴运动平台、打磨机构、激光扫描定位机构,吸盘定位装置包括有若干中间吸盘和若干辅助吸盘;四轴运动平台包括有X轴移动机构、Y轴移动机构、Z轴移动机构、R轴摆动机构;打磨机构包括有打磨电机、打磨铣刀;激光扫描定位机构包括有激光传感器。本发明通过吸盘定位装置可以很好的适应叶片表面,能够稳定地将整个框架与叶片保持固定,保证内错层的打磨质量;通过四轴运动平台和激光扫描定位机构的配合,可以快速有效的对内错层进行定位,提高打磨的精准性;利用吸尘器可以将打磨过程中产生的灰尘快速吸走收集,避免打磨产生的灰尘影响车间环境。
技术研发人员:曾小刚,陈利华
受保护的技术使用者:辛帕智能科技(平湖)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!