双面研磨机的制作方法
1.本实用新型涉及产品加工技术领域,特别涉及一种双面研磨机。
背景技术:
2.双面研磨机作为一种抛光、磨光设备在机械加工中广泛使用。双面研磨机在研磨加工工件的过程中,其上研磨盘结构在升降移动过程中的高度控制是一个很难控制的过程,控制不好将导致上研磨盘结构施加在工件上的压力过大或过小,进而导致无法加工得到用户所需厚度的工件,致使工件的成品率降低。
技术实现要素:
3.基于此,有必要提供一种能够提高上研磨盘结构施加在工件上的压力与工件所需的加工厚度的匹配度的双面研磨机。
4.一种双面研磨机,包括:
5.上研磨盘结构;
6.下研磨盘结构,与所述上研磨盘结构相对设置;
7.行星轮结构,设置在所述上研磨盘结构与所述下研磨盘结构之间,所述行星轮结构用于放置并带动工件做行星运动;所述上研磨盘结构能够被驱动相对所述下研磨盘结构升降移动,以使所述上研磨盘结构和所述下研磨盘结构夹持或松开所述工件;
8.检测探头,设置于所述上研磨盘结构朝向所述行星轮结构的一侧;
9.基准块,设置于所述行星轮结构朝向所述上研磨盘结构的一侧,所述检测探头能够与所述基准块接触以检测所述上研磨盘结构相对于所述基准块的高度信息;且所述检测探头还能够相对所述上研磨盘结构升降移动,以使所述检测探头能够朝靠近或远离所述基准块的方向移动,从而以调节所述检测探头与所述基准块之间的接触程度;以及
10.控制器,所述控制器与所述上研磨盘结构、所述下研磨盘结构、所述行星轮结构以及所述检测探头电连接。
11.在其中一个实施例中,所述双面研磨机还包括检测探头调节机构,所述检测探头调节机构包括凸柱和活动套筒,所述凸柱设置于所述上研磨盘结构朝向所述行星轮结构的一侧,所述活动套筒套设于凸柱的外侧,且与所述凸柱相螺合,所述检测探头设置于所述活动套筒的一端,驱动所述活动套筒相对所述凸柱旋转,可带动所述活动套筒相对所述凸柱沿所述活动套筒的轴向升降,从而带动所述检测探头沿所述活动套筒的轴向升降移动。
12.在其中一个实施例中,所述上研磨盘结构包括上研磨盘和上研磨盘升降驱动模组,所述上研磨盘升降驱动模组能够驱动所述上研磨盘升降移动,以使所述工件被夹持在所述上研磨盘与所述下研磨盘结构之间,所述检测探头设置于所述上研磨盘朝向所述行星轮结构的一侧,所述基准块设置于所述行星轮结构朝向所述上研磨盘的一侧,所述检测探头能够与所述基准块接触以检测所述上研磨盘相对于所述基准块的高度信息。
13.在其中一个实施例中,所述上研磨盘结构还包括上研磨盘驱动机构,所述上研磨
盘驱动机构能够驱动所述上研磨盘转动,以使所述上研磨盘与放置在所述行星轮机构上的所述工件产生相对移动,所述上研磨盘升降驱动模组能够驱动所述上研磨盘和所述上研磨盘驱动机构升降移动。
14.在其中一个实施例中,所述下研磨盘结构包括下研磨盘驱动机构和下研磨盘,所述下研磨盘驱动机构能够驱动所述下研磨盘转动,以使所述下研磨盘与放置在所述行星轮结构上的所述工件产生相对移动。
15.在其中一个实施例中,所述下研磨盘包括承载盘体和下磨盘盘体,所述下磨盘盘体用于与所述工件接触,所述下磨盘盘体设置在承载盘体上,所述下磨盘盘体与所述承载盘体同轴设置。
16.在其中一个实施例中,所述下研磨盘驱动机构包括下磨盘驱动件、下磨盘减速机和下磨盘传动轴,所述下磨盘减速机为空心轴减速机,所述下磨盘减速机的输出端为空心轴,所述下磨盘减速机的输入端和输出端相互垂直;所述下磨盘驱动件与所述下磨盘减速机的输入端连接,所述下磨盘传动轴的底端与所述下磨盘减速机的输出端连接,所述下磨盘传动轴的顶端与所述承载盘体连接,所述下磨盘驱动件能够通过所述下磨盘减速机带动所述下磨盘传动轴旋转,进而通过所述下磨盘传动轴带动所述下研磨盘旋转。
17.在其中一个实施例中,所述行星轮结构包括太阳轮、外齿轮及行星轮,所述外齿轮环绕在所述太阳轮外,所述行星轮设置在所述太阳轮和所述外齿轮之间,且所述行星轮能够与所述太阳轮和所述外齿轮相啮合,所述工件能够放置在所述行星轮上,驱动所述太阳轮绕自身的转动,可带动所述行星轮绕自身的轴向转动的同时,绕所述太阳轮的轴向公转,从而以使所述工件跟随所述行星轮做行星运动,所述基准块设置于所述太阳轮朝向所述上研磨盘结构的一侧。
18.在其中一个实施例中,还包括冷却液供给系统,所述冷却液供给系统用于向所述上研磨盘结构和所述下研磨盘结构输送冷却液。
19.在其中一个实施例中,还包括上下料机构,所述上下料机构能够与所述下研磨盘结构相对接,所述上下料机构用于实现所述工件相对所述下研磨盘结构的上下料。
20.与相关技术相比,本技术实施例具有以下有益效果:
21.该双面研磨机启动后,控制器控制上研磨盘结构相对下研磨盘结构下降,以使工件被夹持在上研磨盘结构和下研磨盘结构之间,然后控制器控制行星轮结构带动工件做行星运动,使得工件与上研磨盘结构以及下研磨盘结构之间具有相对运动,从而实现对工件的上下两面的研磨加工;
22.此外,在控制器控制上研磨盘结构相对下研磨盘结构下降的过程中,当上研磨盘结构下降至检测探头接触到基准块以后,检测探头将信息反馈到控制器,控制器将上研磨盘结构的高度信息清零并重新定义上研磨盘结构的当前高度为基准高度,上研磨盘结构继续下降,检测探头将上研磨盘结构相对于基准块的高度信息实时反馈到控制器,使控制器能获知上研磨盘结构相对于基准块的高度信息;当检测探头检测到上研磨盘结构相对于基准块的高度达到预设高度时,控制器控制上研磨盘结构停止下降,上研磨盘结构停止下压,以使得上研磨盘结构施加在工件上的压力与工件所需的加工厚度相匹配,因此,本技术通过检测探头与基准块的接触配合对上研磨盘结构相对于基准块的高度信息的实时检测与反馈,从而可对上研磨盘结构相对于基准块的高度(即升降位移量)进行精准控制,确保上
研磨盘结构施加在工件上的压力与工件所需的加工厚度相匹配,有效提高了工件的成品率;
23.并且在本技术中,检测探头还能够相对上研磨盘结构升降移动,以使检测探头能够朝靠近或远离基准块的方向移动,从而可实现检测探头与基准块之间的接触程度的调节,避免了因检测探头与基准块之间的过度接触而产生的检测探头的高度检测的误差,保证了检测探头的高度检测的精度和准确性,进一步确保了上研磨盘结构施加在工件上的压力与工件所需的加工厚度相匹配。
附图说明
24.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
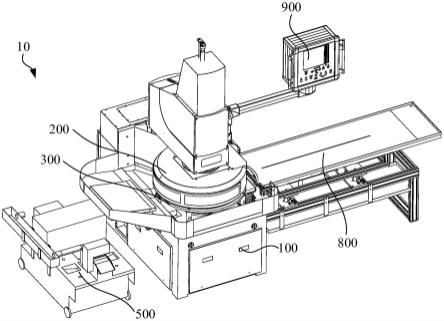
25.图1为一实施例中的双面研磨机的结构示意图;
26.图2为一实施例中的双面研磨机的剖视图;
27.图3为图2中a处的放大示意图;
28.图4为一实施例中的双面研磨机的上研磨盘结构的结构示意图;
29.图5为一实施例中的双面研磨机的另一剖视图;
30.图6为一实施例中的双面研磨机的行星轮结构的结构示意图;
31.图7为另一实施例中的双面研磨机的行星轮结构的结构示意图;
32.图8为一实施例中的双面研磨机的下研磨盘结构的结构示意图;
33.图9为一实施例中的双面研磨机的局部结构示意图;
34.图10为一实施例中的双面研磨机的另一视角的局部结构示意图;
35.图11为一实施例中的双面研磨机的上下料机构的结构示意图;
36.图12为图11中b处的放大示意图。
具体实施方式
37.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
38.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
39.另外,在本实用新型中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,全文中的“和/或”包括三个方案,以a和/或b为例,包括a技术方案、b技术方案,以及a和b同时满足的技术方案;另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基
础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
40.如图1至图3所示,本技术提供了一种双面研磨机10,该双面研磨机10包括上研磨盘结构200、下研磨盘结构300、行星轮结构400、检测探头701、基准块702以及控制器900,下研磨盘结构300与上研磨盘结构200相对设置,行星轮结构400设置在上研磨盘结构200与下研磨盘结构300之间,行星轮结构400用于放置并带动工件做行星运动,上研磨盘结构200能够被驱动相对下研磨盘结构300升降移动,以使上研磨盘结构200和下研磨盘结构300夹持或松开工件。
41.检测探头701设置于上研磨盘结构200朝向行星轮结构400的一侧,基准块702设置于行星轮结构400朝向上研磨盘结构200的一侧,检测探头701能够与基准块702接触以检测上研磨盘结构200相对于基准块702的高度信息;且检测探头701还能够相对上研磨盘结构200升降移动,以使检测探头701能够朝靠近或远离基准块702的方向移动,从而以调节检测探头701与基准块702之间的接触程度;控制器900与上研磨盘结构200、下研磨盘结构300、行星轮结构400以及检测探头701电连接。
42.该双面研磨机10启动后,控制器900控制上研磨盘结构200相对下研磨盘结构300下降,以使工件被夹持在上研磨盘结构200和下研磨盘结构300之间,然后控制器900控制行星轮结构400带动工件做行星运动,使得工件与上研磨盘结构200以及下研磨盘结构300之间具有相对运动,从而实现对工件的上下两面的研磨加工;
43.此外,在控制器900控制上研磨盘结构200相对下研磨盘结构300下降的过程中,当上研磨盘结构200下降至检测探头701接触到基准块702以后,检测探头701将信息反馈到控制器900,控制器900将上研磨盘结构200的高度信息清零并重新定义上研磨盘结构200的当前高度为基准高度,上研磨盘结构200继续下降,检测探头701将上研磨盘结构200相对于基准块702的高度信息实时反馈到控制器900,使控制器900能获知上研磨盘结构200相对于基准块702的高度信息;当检测探头701检测到上研磨盘结构200相对于基准块702的高度达到预设高度时,控制器900控制上研磨盘结构200停止下降,上研磨盘结构200停止下压,以使得上研磨盘结构200施加在工件上的压力与工件所需的加工厚度相匹配,因此,本技术通过检测探头701与基准块702的接触配合对上研磨盘结构200相对于基准块702的高度信息的实时检测与反馈,从而可对上研磨盘结构200相对于基准块702的高度(即升降位移量)进行精准控制,确保上研磨盘结构200施加在工件上的压力与工件所需的加工厚度相匹配,有效提高了工件的成品率;
44.并且在本技术中,检测探头701还能够相对上研磨盘结构200升降移动,以使检测探头701能够朝靠近或远离基准块702的方向移动,从而可实现检测探头701与基准块702之间的接触程度的调节,避免了因检测探头701与基准块702之间的过度接触而产生的检测探头701的高度检测的误差,保证了检测探头701的高度检测的精度和准确性,进一步确保了上研磨盘结构200施加在工件上的压力与工件所需的加工厚度相匹配。
45.如图4所示,双面研磨机10还包括检测探头调节机构703,检测探头调节机构703包括凸柱704和活动套筒705,凸柱704设置于上研磨盘结构200朝向行星轮结构400的一侧,活动套筒705套设于凸柱704的外侧,且与凸柱704相螺合,检测探头701设置于活动套筒705的一端,驱动活动套筒705相对凸柱704旋转,可带动活动套筒705相对凸柱704沿活动套筒705
的轴向升降,从而带动检测探头701沿活动套筒705的轴向升降移动,以使得检测探头701沿活动套筒705的轴向靠近或远离基准块702,进而以调节检测探头701与基准块702之间的接触程度。
46.如图1所示,双面研磨机10还包括机台100,上研磨盘结构200、下研磨盘结构300、行星轮结构400以及控制器900均设置于机台100上。
47.如图5所示,上研磨盘结构200还包括上研磨盘230和上研磨盘升降驱动模组240,上研磨盘升降驱动模组240能够驱动上研磨盘230升降移动,以使工件被夹持在上研磨盘230与下研磨盘结构300之间。上研磨盘升降驱动模组240的设置,使得上研磨盘230与下研磨盘结构300之间能够实现接触与分离,随意调节接触位置以及施加在工件上的压力,使工件研磨能够达到分工进行,前期需要粗加工时,可以增加压力,快速打磨,需要精加工时,合理控制压力,使其慢速打磨出精品。
48.具体地,检测探头701设置于上研磨盘230朝向行星轮结构400的一侧,检测探头701设置于上研磨盘230的中央,基准块702设置于行星轮结构400朝向上研磨盘230的一侧,检测探头701能够与基准块702接触以检测上研磨盘230相对于基准块702的高度信息,凸柱704设置于上研磨盘230朝向行星轮结构400的一侧。
49.如图5所示,上研磨盘结构200还包括上研磨盘驱动机构220,上研磨盘驱动机构220能够驱动上研磨盘230转动,以使上研磨盘230与放置在行星轮结构400上的工件产生相对移动。上研磨盘230自身能够独立转动,使得上研磨盘230与工件之间的摩擦力可控,自由调节转动速度以及转动方向,从而可改变上研磨盘230的消耗规律。具体地,上研磨盘升降驱动模组240能够驱动上研磨盘230和上研磨盘驱动机构220升降移动。
50.如图3所示,进一步地,上研磨盘230包括从上到下依次连接的传动盘体231和上研磨盘体232,上研磨盘体232用于与工件接触,检测探头701设置于上研磨盘体232朝向行星轮结构400的一侧,检测探头701能够与基准块702接触以检测上研磨盘体232相对于基准块702的高度信息,凸柱704设置于上研磨盘体232朝向行星轮结构400的一侧。
51.在一实施例中,上研磨盘230的中央具有过孔201,具体地,上研磨盘体232的中央具有过孔201,该过孔201贯穿上研磨盘体232朝向传动盘体231的一侧以及上研磨盘体232背离传动盘体231的一侧,检测探头701穿设在上研磨盘230的中央过孔201中,且检测探头701的探头部外露于该上研磨盘230的中央过孔201。
52.如图6所示,行星轮结构400包括太阳轮410、外齿轮420及行星轮430,外齿轮420环绕在太阳轮410外,行星轮430设置在太阳轮410和外齿轮420之间,且行星轮430能够与太阳轮410和外齿轮420相啮合,工件能够放置在行星轮430上,驱动太阳轮410绕自身的转动,可带动行星轮430绕自身的轴向转动的同时,绕太阳轮410的轴向公转,从而以使工件跟随行星轮430做行星运动。具体地,基准块702设置于太阳轮410朝向上研磨盘结构200的一侧,基准块702设置于太阳轮410的中央。
53.如图7所示,外齿轮420包括支撑环421和多个外齿柱422,支撑环421环绕在太阳轮410外,支撑环421环绕在下研磨盘330外,多个外齿柱422周向设置于支撑环421上,行星轮430能够与外齿柱422相啮合,行星轮结构400还包括动力机构440,动力机构440与支撑环421连接,动力机构440用于驱动支撑环421沿自身的轴向升降,以调节支撑环421的高度,从而以使支撑环421位于下研磨盘结构300的下方。
54.由于下研磨盘结构300属于消耗品,随着下研磨盘结构300研磨加工工件时间的不断增加,下研磨盘结构300的高度会因其磨损量的增加而逐渐下降,因此,当需要借助上下料机构800进行上下料时,可通过动力机构440驱动支撑环421沿自身的轴向升降,以调节支撑环421的高度,从而以使支撑环421位于下研磨盘结构300的下方,以便于实现上下料机构800与下研磨盘结构300的无遮挡对接,避免由于高于下研磨盘结构300的支撑环421的干涉阻挡导致在上下料机构800和下研磨盘结构300之间拖动放置工件的行星轮430时运行不顺甚至使行星轮430上的工件磨损,这样工作人员可以直接将放置待研磨的工件的行星轮430从上下料机构800上取下并放置到下研磨盘结构300上完成上料,或者将放置研磨完成的工件的行星轮430从下研磨盘结构300上取下并放置到上下料机构800上完成下料,进而保证上下料机构800顺畅的上料和下料作业。
55.如图7所示,进一步地,动力机构440的数量为多个,多个动力机构440间隔设置于支撑环421的外周。
56.在一实施例中,动力机构440包括固定柱441、活动套管442以及锁紧件,固定柱441位于支撑环421的下方,具体地,固定柱441设置于机台100内,活动套管442的一端套设于固定柱441的外侧,活动套管442的另一端与支撑环421连接,活动套管442能够相对固定柱441沿活动套管442的轴向伸缩,以带动支撑环421沿自身的轴向升降,以调节支撑环421的高度,从而以使支撑环421位于下研磨盘结构300的下方,锁紧件用于将活动套管442锁定于固定柱441上。其中,锁紧件可以为卡环,卡环设置于活动套管442的节点处,卡环用于卡紧活动套管442的节点,以使活动套管442固定于固定柱441上,当需要调节支撑环421的高度时,只需松开卡环,使活动套管442相对固定柱441沿活动套管442的轴向伸缩,即可调节支撑环421的高度,从而以使支撑环421位于下研磨盘结构300的下方。
57.在另一实施例中,动力机构440包括驱动缸体和驱动轴,驱动缸体位于支撑环421的下方,具体地,驱动缸体设置于机台100内,驱动轴的一端套设于驱动缸体内,驱动轴的另一端与支撑环421连接,驱动缸体能够驱动轴沿自身的轴向伸缩,以带动支撑环421沿自身的轴向升降,以调节支撑环421的高度,从而以使支撑环421位于下研磨盘结构300的下方。
58.如图7所示,多个外齿柱422包括穿设于支撑环421上的至少一个第一外齿柱423,第一外齿柱423位于下研磨盘结构300与上下料机构800的对接处,行星轮430能够与第一外齿柱423相啮合,第一外齿柱423能够被驱动相对支撑环421沿第一外齿柱423的轴向升降,以使第一外齿柱423外露于支撑环421的顶部的一端的高度可调。
59.当需要借助上下料机构800进行上下料时,可驱动第一外齿柱423相对支撑环421沿第一外齿柱423的轴向下降,以调低第一外齿柱423外露于支撑环421的顶部的一端的高度直至使第一外齿柱423完全位于支撑环421的底部(即第一外齿柱423外露于支撑环421的顶部的一端的高度为0),以解除第一外齿柱423对放置工件的行星轮430的阻挡,以便于实现上下料机构800与下研磨盘结构300的无遮挡对接,避免由于第一外齿柱423的干涉阻挡导致在拖动放置工件的行星轮430时运行不顺甚至使行星轮430上的工件磨损,这样工作人员可以直接将放置待研磨的工件的行星轮430从上下料机构800上取下并放置到下研磨盘结构300上完成上料,或者将放置研磨完成的工件的行星轮430从下研磨盘结构300上取下并放置到上下料机构800上完成下料,进而保证上下料机构800顺畅的上料和下料作业。
60.如图7所示,双面研磨机10还包括调节机构450,调节机构450包括顶升组件460和
驱动单元470,顶升组件460位于支撑环421的底部,第一外齿柱423穿设于支撑环421并与顶升组件460的顶部连接,驱动单元470与顶升组件460传动连接,驱动单元470能够驱动顶升组件460升降移动,以带动第一外齿柱423相对支撑环421沿第一外齿柱423的轴向升降,以使第一外齿柱423外露于支撑环421的顶部的一端的高度可调。
61.进一步地,顶升组件460包括相对设置的顶升板462和安装板464,顶升板462和安装板464均可以为金属板,安装板464位于支撑环421的底部,顶升板462位于支撑环421和安装板464之间,第一外齿柱423穿设于支撑环421并与顶升板462连接,具体地,第一外齿柱423可以为圆柱形,第一外齿柱423可以固定连接在顶升板462上,也可以与顶升板462一体成型,驱动单元470包括驱动本体472和伸缩轴474,驱动本体472设置于安装板464的底部,伸缩轴474的一端与顶升板462的底部连接,伸缩轴474的另一端穿设于安装板464并伸入至驱动本体472内,具体地,安装板464和驱动本体472位于机台100内,顶升板462位于机台100外,伸缩轴474的一端穿过机台100并与顶升板462连接。驱动本体472能够驱动伸缩轴474沿自身的轴向伸缩,以带动顶升板462相对安装板464沿伸缩轴474的轴向升降,进而带动第一外齿柱423相对支撑环421沿第一外齿柱423的轴向升降。
62.在一实施例中,驱动单元470的数量为多个,多个驱动单元470相对顶升板462及安装板464间隔排布。进一步地,行星轮结构400还包括导向柱,导向柱的一端与顶升板462连接,导向柱的另一端与安装板464连接,导向柱用于对顶升板462相对安装板464的升降进行导向。
63.行星轮结构400还包括防水罩480,防水罩480套设于伸缩轴474的外侧,且防水罩480位于顶升板462和安装板464之间。
64.进一步地,第一外齿柱423的数量为多个,多个第一外齿柱423均匀设置于支撑环421上形成第一圆弧形外齿柱组,第一圆弧形外齿柱组可以为一个小于180
°
的圆弧形外齿柱组,各个第一外齿柱423的一端均与顶升组件460的顶部连接,驱动单元470能够驱动顶升组件460升降移动,以带动各个第一外齿柱423相对支撑环421沿第一外齿柱423的轴向同步升降,以使各个第一外齿柱423外露于支撑环421的顶部的一端的高度同步可调。
65.多个外齿柱422还包括多个第二外齿柱424,多个第二外齿柱424均匀设置于支撑环421上形成第二圆弧形外齿柱组,第二圆弧形外齿柱组可以为一个大于180
°
的圆弧形外齿柱组,且第一圆弧形外齿柱组和第二圆弧形外齿柱组能够拼接形成一个完整的圆形外齿柱组。具体地,第二外齿柱424可以为圆柱形,第二外齿柱424可以固定连接在支撑环421上,第二外齿柱424也可以与支撑环421一体成型。
66.如图6所示,行星轮430上设置有存放孔432,工件能够放置于存放孔432内。通过设置存放孔432用来放置工件,使工件在行星轮430上的位置被限定。存放孔432贯穿行星轮430的上下表面,存放孔432的形状与工件的形状相匹配,具体来说,工件的侧面与存放孔432的内壁形状匹配,工件放置在存放孔432内时,工件的上下表面与行星轮430的上下表面平行。存放孔432的数量为多个,多个存放孔432间隔设置于行星轮430上。
67.进一步地,行星轮430的数量为多个,多个行星轮430均设置在太阳轮410和外齿轮420之间,且多个行星轮430均能够与太阳轮410和外齿轮420相啮合。
68.如图8所示,下研磨盘结构300包括下研磨盘驱动机构320和下研磨盘330,下研磨盘驱动机构320能够驱动下研磨盘330转动,以使下研磨盘330与放置在行星轮结构400上的
工件产生相对移动。下研磨盘330自身能够独立转动,使得下研磨盘330与工件之间的摩擦力可控,自由调节转动速度以及转动方向,从而可改变下研磨盘330的消耗规律。具体地,支撑环421环绕在下研磨盘330外,动力机构440用于驱动支撑环421沿自身的轴向升降,从而以使支撑环421位于下研磨盘330的下方。
69.下研磨盘330包括承载盘体331和下磨盘盘体332,承载盘体331呈倒置的圆台形,承载盘体331的轴向上设置有通孔,下磨盘盘体332呈环形,下磨盘盘体332用于与工件接触,下磨盘盘体332设置在承载盘体331上。具体地,支撑环421环绕在下磨盘盘体332外,动力机构440用于驱动支撑环421沿自身的轴向升降,从而以使支撑环421位于下磨盘盘体332的下方。
70.如图8所示,下研磨盘驱动机构320设在机台100内,下研磨盘驱动机构320包括下磨盘驱动件321、下磨盘减速机322和下磨盘传动轴323,下磨盘减速机322为空心轴减速机,下磨盘减速机322的输出端为空心轴,下磨盘减速机322的输入端和输出端相互垂直;下磨盘传动轴323为空心转轴,下磨盘驱动件321与下磨盘减速机322的输入端连接,下磨盘传动轴323的底端与下磨盘减速机322的输出端连接,下磨盘传动轴323的顶端与承载盘体331连接,下磨盘驱动件321通过下磨盘减速机322带动下磨盘传动轴323旋转,进而通过下磨盘传动轴323带动下研磨盘330旋转。
71.如图6及图8所示,太阳轮410包括太阳轮体411和多个内齿柱412,太阳轮体411呈圆盘形,多个内齿柱412周向设置于太阳轮体411上,行星轮430能够与内齿柱412相啮合。具体地,太阳轮体411位于承载盘体331的中央通孔处,太阳轮体411与承载盘体331同轴设置。
72.如图8所示,双面研磨机10还包括太阳轮驱动机构700,太阳轮驱动机构700用于带动太阳轮410旋转。具体地,太阳轮驱动机构700设置于机台100内,且位于下研磨盘驱动机构320的下方,太阳轮驱动机构700包括太阳轮驱动件710、太阳轮减速机720和太阳轮传动轴730;太阳轮减速机720为空心轴减速机,太阳轮减速机720的输出端为空心轴,太阳轮减速机720的输入端和输出端相互垂直;太阳轮驱动件710与太阳轮减速机720的输入端连接,太阳轮传动轴730与太阳轮减速机720的输出端连接,太阳轮传动轴730从太阳轮减速机720的顶端穿出并穿过下磨盘传动轴323,太阳轮体411设置在太阳轮传动轴730的顶端,太阳轮驱动件710通过太阳轮减速机720带动太阳轮传动轴730旋转,进而通过太阳轮传动轴730带动太阳轮410旋转。
73.如图5及图9所示,双面研磨机10还包括悬臂组件600和驱动组件640,悬臂组件600包括转筒610和悬臂620,转筒610转动设置于机台100上,悬臂620垂直连接于转筒610上,并与上研磨盘结构200连接,驱动组件640与转筒610传动连接,驱动组件640能够驱动转筒610绕自身的轴向转动,以通过悬臂620带动上研磨盘结构200摆动,以使上研磨盘结构200靠近或远离下研磨盘结构300。如此设置,以便将上研磨盘结构200移开,方便工件相对于下研磨盘结构300的上下料,使上研磨盘结构200不必大幅度升降即可在上研磨盘结构200和下研磨盘结构300之间形成较大的相对位移,从而产生上下料空间,降低了上研磨盘结构200的移动能耗。
74.具体地,转筒610呈圆筒形,悬臂620固定在转筒610的顶端并向转筒610的外部延伸;在一些实施例中,悬臂620可以焊接在转筒610上,悬臂620也可以通过螺栓固定在转筒610上,悬臂620还可以与转筒610一体成型。
75.如图10所示,转筒610的外侧壁上设置有连接架612,驱动组件640包括驱动件641和伸缩杆642,驱动件641转动设置于机台100上,伸缩杆642的一端套设于驱动件641内,伸缩杆642的另一端转动连接于连接架612,驱动件641能够驱动伸缩杆642沿自身的轴向伸缩,以通过连接架612带动转筒610绕自身的轴向转动,进而通过悬臂620带动上研磨盘结构200摆动。
76.具体地,驱动件641驱动伸缩杆642伸出时会推动连接架612,从而带动转筒610绕自身的轴向旋转,进而通过悬臂620带动上研磨盘结构200摆动;驱动件641驱动伸缩杆642回缩时则会拉回连接架612,从而带动转筒610绕自身的轴向反向旋转,进而通过悬臂620带动上研磨盘结构200反向摆动。
77.进一步的,伸缩杆642的一端设置有枢接耳643,且枢接耳643转动连接在连接架612上,即伸缩杆642的一端通过枢接耳643实现与连接架612的转动连接。
78.如图9所示,悬臂组件600还包括安装筒630,安装筒630设置于悬臂620远离转筒610的一端,上研磨盘结构200设置于安装筒630上,安装筒630的轴向与转筒610的轴向平行。在一些实施例中,安装筒630可以焊接在悬臂620上,安装筒630也可以通过螺栓固定在悬臂620上,安装筒630还可以与悬臂620一体成型。具体地,上研磨盘230设置于安装筒630的底端,上研磨盘230与安装筒630同轴设置,上研磨盘驱动机构220设置于安装筒630的顶端。
79.双面研磨机10还包括定位组件650,定位组件650用于锁定悬臂组件600的相对位置。具体地,上研磨盘结构200和下研磨盘结构300准确对位时,定位组件650能够锁定悬臂组件600的相对位置,从而锁定上研磨盘结构200的相对位置;若上研磨盘结构200和下研磨盘结构300对位不准时,则定位组件650不能锁定悬臂组件600的相对位置,此时上研磨盘结构200和下研磨盘结构300不能运作,从而确保了上研磨盘结构200和下研磨盘结构300只有在二者准确对位后才能运作,提高了双面研磨机10的研磨精度,而且使双面研磨机10的运行更合规、更安全。
80.如图10所示,定位组件650包括定位驱动件651、定位销和定位座653;定位座653设置在机台100上,定位座653的顶端形成有定位孔;定位驱动件651设置于连接架612上,定位驱动件651的活塞杆指向机台100;定位销设置在定位驱动件651的活塞杆的自由端,以使定位驱动件651能带动定位销沿自身的轴向升降,从而以使定位销能够插入或移出定位座653的定位孔。具体地,定位销插入定位座653的定位孔后,悬臂组件600的相对位置被锁定,进而上研磨盘结构200的相对位置也被锁定。
81.如图9所示,双面研磨机10还包括支撑筒660,支撑筒660的底端设置于上研磨盘驱动机构220上,支撑筒660与安装筒630同轴设置,上研磨盘升降驱动模组240设置于支撑筒660的顶端。
82.如图1所示,双面研磨机10还包括冷却液供给系统500,冷却液供给系统500设置于机台100的旁侧,冷却液供给系统500用于向上研磨盘结构200和下研磨盘结构300输送冷却液。
83.具体地,冷却液供给系统500能够向上研磨盘结构200和下研磨盘结构300输送冷却液,冷却液能够有效吸收上研磨盘结构200和下研磨盘结构300的热量,从而可对上研磨盘结构200和下研磨盘结构300进行有效冷却,减少上研磨盘结构200和下研磨盘结构300过
热损坏几率,降低更换上研磨盘结构200和下研磨盘结构300的生产成本。
84.如图3所示,上研磨盘结构200内设置有第一冷却液通道210,冷却液供给系统500用于向第一冷却液通道210输送冷却液。
85.具体地,上研磨盘230内设置有第一冷却液通道210,第一冷却液通道210包括相连通的第一子冷却液通道212和第二子冷却液通道214,传动盘体231上设置有第一子冷却液通道212,第一子冷却液通道212为环形,第一子冷却液通道212沿传动盘体231的周向设置,第一子冷却液通道212为多排,多排第一子冷却液通道212沿传动盘体231的径向间隔排布,上研磨盘体232上设置有第二子冷却液通道214,第二子冷却液通道214从上研磨盘体232的上表面贯通至上研磨盘体232的下表面,第二子冷却液通道214为多排,多排第二子冷却液通道214沿上研磨盘体232的径向间隔排布,各排第一子冷却液通道212与对应的各排第二子冷却液通道214连通,以使冷却液能在上研磨盘230内均匀分布,提高上研磨盘230的冷却效果。
86.如图3所示,下研磨盘结构300内设置有第二冷却液通道310,冷却液供给系统500还用于向第二冷却液通道310输送冷却液。
87.具体地,下研磨盘330内设置有第二冷却液通道310,下研磨盘体332上设置有第二冷却液通道310,第二冷却液通道310从下研磨盘体332的上表面贯通至下研磨盘体332的下表面,第二冷却液通道310为多排,多排第二冷却液通道310沿下研磨盘体332的径向间隔排布,以使冷却液能在下研磨盘330内均匀分布,提高下研磨盘330的冷却效果。
88.如图1所示,双面研磨机10还包括上下料机构800,上下料机构800设置于机台100的旁侧,具体地,上下料机构800和冷却液供给系统500分别位于机台100的相对两侧,上下料机构800能够与下研磨盘结构300相对接,上下料机构800用于实现工件相对下研磨盘结构300的上下料。
89.如图11所示,该上下料机构800包括支撑架810、举升机构820以及输送平台830,支撑架810包括顶架811和底架812,顶架811的一端用于与双面研磨机10的机台100的外侧壁连接,底架812设置于顶架811远离机台100的一端以支撑顶架811;举升机构820设置于顶架811上;输送平台830设置于举升机构820上,输送平台830用于与双面研磨机10的下研磨盘结构300进行对接,输送平台830能够带动放置工件的行星轮430沿输送平台830的传输方向靠近或远离下研磨盘结构300;举升机构820能够驱动输送平台830升降移动,以使输送平台830的高度与下研磨盘结构300的高度相齐平。
90.本技术的上下料机构800,在进行上下料时,使输送平台830与双面研磨机10的下研磨盘结构300进行对接,这样在输送平台830的传输作用下,工作人员可以直接将放置待研磨的工件的行星轮430从输送平台830上取下并放置到下研磨盘结构300上完成上料,或者将放置研磨完成的工件的行星轮430从下研磨盘结构300上取下并放置到输送平台830上完成下料,如此,上下料操作只需要花费较短时间,随后双面研磨机10即可运行,无需等待工作人员手动一件件地上下料,节省了上下料时间,提高了上下料的工作效率;
91.此外,由于下研磨盘结构300属于消耗品,随着下研磨盘结构300研磨加工工件时间的不断增加,下研磨盘结构300的高度会因其磨损量的增加而逐渐下降,举升机构820能够驱动输送平台830升降移动,使输送平台830的高度能够进行调节,确保输送平台830的高度与下研磨盘结构300的高度保持齐平,避免由于输送平台830与下研磨盘结构300之间形
成的高度差,导致在输送平台830和下研磨盘结构300之间拖动放置工件的行星轮430时运行不顺甚至使行星轮430上的工件磨损,进而保证上下料机构800顺畅的上料和下料作业。
92.顶架811为框架结构,顶架811为举升机构820和输送平台830提供支撑作用,机台100连接顶架811的一端,并为顶架811以及设置在顶架811上的举升机构820和输送平台830提供支撑作用,底架812垂直设置在顶架811远离机台100的一端,以为顶架811上的举升机构820和输送平台830提供辅助支撑作用,提高稳定性;需要指出的是,在本实施例中,机台100和底架812的支撑力具有足够的强度,顶架811连接机台100的一端未设置辅助支撑结构,以减少支撑架810的设计成本。
93.进一步地,举升机构820的数量为多个,多个举升机构820相对顶架811以及输送平台830间隔排布。
94.如图12所示,举升机构820包括动力单元840和举升组件850,举升组件850设置于输送平台830的底部,动力单元840与举升组件850传动连接,动力单元840能够驱动举升组件850升降移动,以带动输送平台830升降移动,从而以使输送平台830的高度与下研磨盘结构300的高度相齐平。
95.举升组件850包括相对设置的举升板852和连接板854,连接板854设置于顶架811上,举升板852设置于输送平台830的底部,并位于输送平台830和连接板854之间,动力单元840包括升降驱动轴841和传动丝杆842,升降驱动轴841的轴向与传动丝杆842的轴向垂直,升降驱动轴841转动设置于连接板854上,传动丝杆842穿设于举升板852并与举升板852相螺合,且升降驱动轴841与传动丝杆842相啮合,升降驱动轴841能够被驱动绕自身的轴向旋转,可通过升降驱动轴841与传动丝杆842的啮合传动带动传动丝杆842绕自身的轴向旋转,以带动举升板852相对连接板854沿传动丝杆842的轴向升降,进而带动输送平台830沿传动丝杆842的轴向升降移动。
96.进一步地,升降驱动轴841的一端设置有蜗轮和蜗杆中的其中一者,传动丝杆842的一端设置有蜗轮和蜗杆中的另一者,蜗轮与蜗杆相啮合,以实现升降驱动轴841与传动丝杆842之间的相互啮合。在本实施例中,升降驱动轴841的一端设置有蜗轮,传动丝杆842的一端设置有蜗杆,在其他实施例中,升降驱动轴841的一端设置有蜗杆,传动丝杆842的一端设置有蜗轮。
97.如图12所示,动力单元840还包括固定座843,固定座843设置于连接板854上,升降驱动轴841转动穿设于固定座843上。进一步地,升降驱动轴841的一端还设置有便于向升降驱动轴841施加驱动升降驱动轴841绕自身的轴向转动的外力的摇把,具体地,蜗轮和蜗杆中的其中一者设置于摇把的一端,摇把设置于升降驱动轴841的另一端。
98.动力单元840还包括连接螺母844,连接螺母844穿设并固定在举升板852上,且连接螺母844与传动丝杆842的一端相螺合。具体地,由于升降驱动轴841与传动丝杆842之间相互啮合,因此,摇动摇把,使升降驱动轴841绕自身的轴向旋转时,传动丝杆842也会绕自身的轴向旋转,从而带动连接螺母844和举升板852沿传动丝杆842的轴向升降。
99.在另一实施例中,举升组件850包括相对设置的举升板852和连接板854,连接板854设置于顶架811上,举升板852设置于输送平台830的底部,并位于输送平台830和连接板854之间,动力单元840包括驱动源和传动轴,驱动源设置于连接板854的底部,传动轴的一端与举升板852的底部连接,传动轴的另一端穿设于连接板854并伸入至驱动源内,驱动源
能够驱动传动轴沿自身的轴向伸缩,以带动举升板852相对连接板854沿传动轴的轴向升降,进而带动输送平台830沿传动轴的轴向升降移动。
100.如图12所示,在一实施例中,举升机构820还包括导向轴860,导向轴860的一端与举升板852连接,导向轴860的另一端与连接板854连接,导向轴860用于对举升板852相对连接板854的升降进行导向。具体地,导向轴860的一端穿过连接板854并伸出至连接板854的底部。导向轴860包括多根,多根导向轴860相对举升板852及连接板854间隔排布。
101.进一步地,举升机构820能够相对顶架811沿输送平台830的传输方向移动,以带动输送平台830沿自身的传输方向靠近或远离下研磨盘结构300。如此设置,当需要进行上下料时,通过驱动举升机构820和输送平台830沿输送平台830的传输方向靠近下研磨盘结构300,以使输送平台830与下研磨盘结构300相对接,当上下料操作完成以后,通过驱动举升机构820和输送平台830沿输送平台830的传输方向远离下研磨盘结构300,以使输送平台830与下研磨盘结构300相分离,以使得下研磨盘结构300周围具有足够大的空间进行工件的研磨加工。
102.输送平台830对接下研磨盘结构300的一端的形状与下研磨盘结构300的形状相适配,以便于实现输送平台830与下研磨盘结构300的无缝对接,避免由于输送平台830与下研磨盘结构300的对接处形状不匹配,导致在输送平台830和下研磨盘结构300之间拖动工件时运行不顺甚至使工件磨损,进而保证上下料机构800顺畅的上料和下料作业。如图10所示,具体地,输送平台830对接下研磨盘结构300的一端具有与下研磨盘结构300的形状相适配的弧形部832。
103.如图11所示,输送平台830包括平台主体834和承载架836,平台主体834设置于承载架836的顶部,具体地,平台主体834的一端悬空设置,承载架836设置于举升机构820上,承载架836用于支撑平台主体834,平台主体834用于与下研磨盘结构300进行对接,平台主体834能够带动放置工件的行星轮430沿输送平台830的传输方向靠近或远离下研磨盘结构300。举升组件850设置于承载架836的底部,举升板852设置于承载架836的底部,并位于承载架836和连接板854之间,平台主体834对接下研磨盘结构300的一端具有与下研磨盘结构300的形状相适配的弧形部832。
104.如图11所示,上下料机构800还包括用于储存物品的储物架870,储物架870设置于顶架811的底部。储物架870包括储物板872和连接臂874,储物板872用于承载物品,储物板872设置于顶架811的底部,连接臂874的一端与储物板872连接,连接臂874的另一端与顶架811连接,以实现储物板872相对顶架811的吊装。连接臂874数量为多个,多个连接臂874间隔设置于储物板872的相对两侧。
105.进一步地,储物板872的一端形成有供底架812穿过的避位槽876,底架812具有相对设置的两个支脚813,两个支脚813间隔设置于顶架811的两侧,储物板872的两侧分别形成有一个避位槽876,两个支脚813分别穿过两个避位槽876。
106.以上仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是在本实用新型的实用新型构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1