一种智能无人渣缓冷场的制作方法
本发明涉及冶炼,具体涉及一种智能无人渣缓冷场。
背景技术:
1、在冶炼过程中,渣缓冷场是重要的环节之一,然而,传统的渣缓冷场采用“电动平车运输-龙门吊倒运”工艺,设备操作多由人工随车进行,虽然已有遥控系统用于控制各项设备,但是仍然存在一定的安全隐患和可靠性问题,而且操作通常需要人工参与,效率往往不高。
2、为此,中国专利申请号为cn202210487292.0的现有专利公开了一种智能化渣缓冷场无人驾驶渣包车调度系统及方法,能够基于各监控系统对各作业环节进行实时监控,对各点位状态信息进行实时掌握,通过调度中心对各个车辆的作业任务和行驶路线进行统一调度和规划,智能化控制各系统相互协作完成作业,车辆无人驾驶,有效节省人力成本,显著提高整体工作效率,实现高效调度和智能化作业。
3、但是,该专利在进行运转时还存在一些不足:(1)不能够实时监测炉渣粗碎仓的进料破碎情况,因此不能够保证炉渣进入运渣车运转时的效率和质量;(2)在出现信号问题时不能够及时提供应急系统保证渣缓冷场内部设备运行的安全性;(3)不能够实时监控渣缓冷场内部设备的运转使用电力,进而不能够保证渣缓冷场内部设备的连续性和使用效率,当出现设备供电不足时不能够及时作出反应。
4、为此,本技术特提出一种智能无人渣缓冷场以解决上述技术问题。
技术实现思路
1、本发明的主要目的在于提供一种能够实时监测炉渣粗碎仓的进料破碎情况并及时进行破碎疏通,且设置应急电台作为应急备用网络保证设备运转控制安全性,同时还能够针对设备电力耗电情况协调控制自动进行充电保证在渣缓冷场内设备持续运转的一种智能无人渣缓冷场。
2、本发明采用以下技术方案解决上述技术问题:
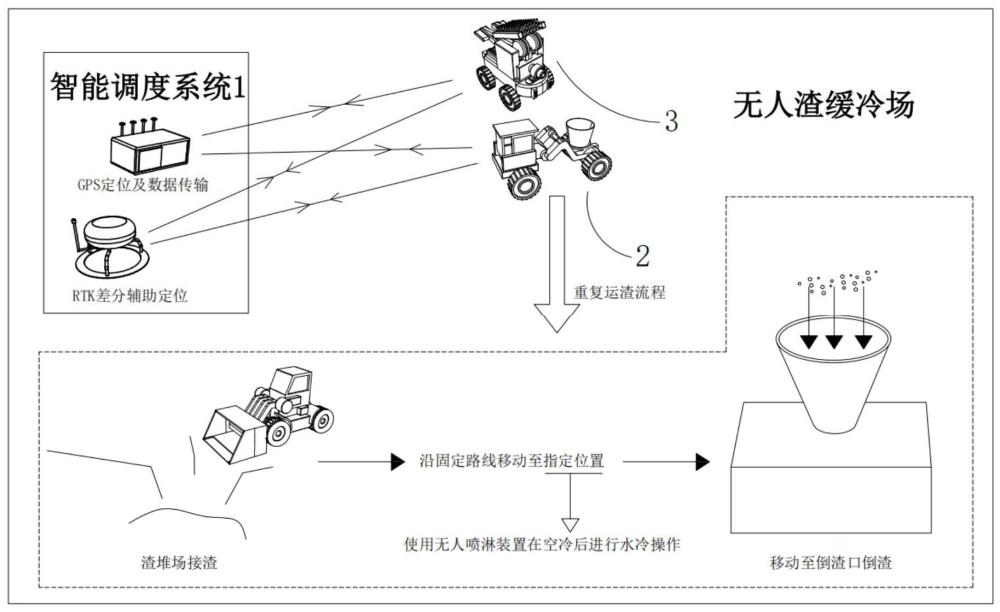
3、一种智能无人渣缓冷场,设置有多组无人渣包车、内置自动喷淋系统的无人喷淋装置和无人探测装置,渣缓冷场还内置有智能调度系统,用于配合设置在无人渣包车上的定位模组实现渣缓冷场作业场景内渣包车无人驾驶以及智能自动调度协同作业控制,所述无人探测装置安装在载有定位模组巡检机器人上,且所述巡检机器人和无人渣包车均通过无人驾驶系统沿定向轨迹在渣缓冷场上移动;
4、所述无人探测装置内置有渣包温度测量系统和炉渣量和堵塞状况监控系统;
5、所述巡检机器人上还通过调节吊臂组件设置有用于炉渣量和堵塞状况监控系统控制驱动的疏通装置,所述巡检机器人和无人渣包车上均设置有内置障碍物感应模块的感应探头。
6、优选的,所述智能调度系统用于根据无人渣包车发出的接渣、倒渣作业指令,使用定位模组定位并规划巡检机器人和无人渣包车的移动路线进行自动调度,具体包括:
7、根据定位模组获取无人渣包车和巡检机器人在渣缓冷场上的实时位置信息;
8、根据生产任务需求和渣缓冷场上无人渣包车与巡检机器人的实时位置信息,为无人渣包车和巡检机器人安排作业任务并进行路线规划,发送调度指令控制各系统协调完成作业;
9、根据调度指令,使用巡检机器人的无人探测装置检测粗碎仓炉渣量和粗碎仓格栅的使用状态,运转调节吊臂组件与疏通装置疏通堵塞的粗碎仓格栅通孔;
10、根据调度指令,在渣包降温地点根据自动喷淋系统空冷计时,控制无人喷淋装置对炉渣水冷喷淋;
11、根据调度指令,使用巡检机器人的无人探测装置检测渣包降温地点处炉渣的温度状况;
12、在巡检机器人和无人渣包车移动过程中,所述感应探头用于探测感知障碍物并通过智能调度系统重新规划行进路线绕开障碍物移动。
13、优选的,所述定位模组设置为安装在巡检机器人和无人渣包车上的gps定位设备;
14、所述渣缓冷场上还装载有多组rtk基站设备配合gps定位设备实现巡检机器人和无人渣包车的差分辅助定位;
15、所述渣缓冷场上还装载有多组uwb基站设备实现巡检机器人和无人渣包车的室内辅助定位。
16、优选的,所述巡检机器人和无人渣包车上还设置有电力监控模块,用于通过电力监控系统接入智能调度系统,在巡检机器人或无人渣包车电力存储量小于最低阈值时,智能调度系统用于重新规划巡检机器人或无人渣包车移动至充电地点的行进路线并协调控制充电系统完成巡检机器人或无人渣包车的充电操作;
17、所述电力存储量的最低阈值基于巡检机器人或无人渣包车相对于充电地点之间的距离长度确定。
18、优选的,所述巡检机器人和无人渣包车上均设有用于进行充电操作的充电部,所述充电部包括充电口、位于充电口两侧的夹压块、夹压块靠近充电口一侧开设的开槽、转动设置在开槽内的接触杆、设置在接触杆上的连接曲臂、位于连接曲臂末端的伸缩套筒、安装在伸缩套筒上且限位滑动在开槽内的吸盘组件和设置在夹压块内用于与吸盘组件连接的电控气泵;
19、充电系统的充电头插入充电口过程中,充电头接触并驱动接触杆在开槽内转动,用于通过连接曲臂和伸缩套筒带动吸盘组件靠近并吸附在充电头基座上。
20、优选的,所述吸盘组件包括滑动连接块、一端滑动贯穿滑动连接块且另一端转动在伸缩套筒上的活塞杆、设置在活塞杆上用于限位活塞杆在开槽内滑动的第一滑块组件、设置在活塞杆上用于限位活塞杆在滑动连接块内滑动的第二滑块组件、安装在滑动连接块上的橡胶吸盘、位于橡胶吸盘内的气孔板和设置在气孔板上用于连接活塞杆的连接弹簧。
21、优选的,所述智能调度系统通过电力监控系统连接电力监控模块并重新规划行进路线轨迹至充电地点,具体包括:
22、根据电力监控系统连接电力监控模块获取巡检机器人和无人渣包车的电力存储量数据和充电状况;
23、根据巡检机器人或无人渣包车的电力存储量数据和充电状况,查找并排除电力存储量小于第一阈值的巡检机器人或无人渣包车所使用的充电地点后,选取距离最近的充电地点;
24、根据智能调度系统重新规划巡检机器人或无人渣包车的行进轨迹路线,并通过无人驾驶系统控制沿轨迹路线定向在渣缓冷场上移动至选取的充电地点;
25、判断该地点是否存在其他巡检机器人或无人渣包车进行充电:
26、若不存在,在该充电地点进行充电操作;
27、若存在,且该充电地点进行充电的巡检机器人或无人渣包车电力存储量小于第二阈值,智能调度系统重新规划该充电地点的巡检机器人或无人渣包车移动路径至其他充电地点充电;
28、若存在,且该充电地点进行充电的巡检机器人或无人渣包车电力存储量大于第二阈值,该充电地点进行充电的巡检机器人或无人渣包车充电完成,重新使用定位模组定位并规划巡检机器人和无人渣包车的移动路线进行自动调度;
29、所述电力存储量的第一阈值基于最远的充电地点之间距离确定,所述电力存储量的第二阈值为电力存储量满充电量的70%至90%范围内的任一值。
30、优选的,所述感应探头内设置有障碍物感应模块用于巡检机器人或无人渣包车移动过程中探测感知移动路径上的障碍物,并通过智能调度系统重新规划行进路线绕开障碍物移动,具体包括:
31、根据多组感应探头在巡检机器人移动过程中通过障碍物感应模块感应探测渣缓冷场的大小位置信息,在移动路径经过障碍物状态下,使用智能调度系统在移动路径经过障碍物部分构建绕行路径;
32、绕行路径设置与障碍物部分之间距离持续大于1m;
33、巡检机器人或无人渣包车移动至绕行路径时优先进入绕行路径进行移动。
34、本发明提供了一种智能无人渣缓冷场。与现有技术相比本发明的有益效果体现在:
35、1.本发明通过设置智能调度系统配合设置在无人渣包车和巡检机器人上的定位模组实现渣缓冷场作业场景内渣包车无人驾驶以及智能自动调度协同作业控制,能够智能化控制各系统相互协作完成作业,进行车辆无人驾驶,有效节省人力成本,显著提高整体工作效率,实现高效调度和智能化作业。
36、2.本发明通过设置应急电台,作为应急备用网络,能够在控制自动驾驶车辆所有高速网络全部失效后,使云控平台还能对车辆执行紧急停车,保证该渣缓冷场内部运行的安全性。
37、3.本发明通过设置智能调度系统,并通过电力监控模块连接电力监控系统,能够在巡检机器人或无人渣包车电力存储量小于最低阈值时,重新规划巡检机器人或无人渣包车移动至充电地点的行进路线并协调控制充电系统完成巡检机器人或无人渣包车的充电操作,保证在渣缓冷场内,能够存在巡检机器人或无人渣包车持续运转,保证该渣缓冷场作业的效率。
38、4.本发明通过设置具备差分定位辅助模组的rtk基站和uwb基站辅助定位模块进行巡检机器人或无人渣包车的定位操作,能够保证巡检机器人或无人渣包车的精准定位,提高倒渣接渣精度,进一步提高炉渣运转的质量和效率。
39、5.本发明通过在无人探测装置内设置炉渣量和堵塞状况监控系统,能够自动识别检测粗碎仓的炉渣量或堵塞状况,并在出现异常时驱动调节吊臂组件与疏通装置运转,破碎疏通堵塞物,保证粗碎仓进料卸料的正常运转。
40、6.本发明通过设置感应探头探测感知移动路径上的障碍物,并通过智能调度系统重新规划行进路线绕开障碍物移动,能够在渣缓冷场内存在炉渣异物或障碍物时,保证巡检机器人或无人渣包车的正常运转移动,保证巡检机器人或无人渣包车的作业质量和安全性。
- 还没有人留言评论。精彩留言会获得点赞!