基于视觉的路面附着系数估计的自动紧急制动控制方法
1.本发明涉及一种自动紧急制动控制方法,具体涉及一种基于视觉的路面附着系数估计的自动紧急制动控制方法。
背景技术:
2.随着道路上的车辆逐年增多,由此引发的交通问题越来越严重,汽车自动紧急制动系统(autonomous emergency braking)的出现,很大程度上保证了汽车行驶过程中的安全性。目前提出的自动紧急制动系统aeb的制动策略主要分为两类:基于安全距离模型的控制方法和基于碰撞时间模型ttc的控制方法。其中基于安全距离模型的控制方法主要包括mazda模型、honda模型和berkeley模型等。基于碰撞时间的模型是根据解算两车的碰撞时间,进而进行制动预测的反馈。传统的早期安全距离避碰策略和ttc避碰策略存在一定的局限性,没有考虑路面附着系数的影响,其他场景中会干扰驾驶员的驾驶。同时有人提出基于汽车的动力学的状态,来估计路面附着系数,这样的算法不能预测出汽车将要行驶的路面,而且在不同道路、多车辆情况下,难以筛选出真正的危险目标车辆,影响自动紧急制动系统的触发,因此具有一定的缺陷。
技术实现要素:
3.本发明为了解决现有自动紧急制动控制方法的不足,提供一种基于视觉的路面附着系数估计的自动紧急制动控制方法,包括以下步骤:
4.(1)筛选前车中的危险目标车辆;
5.根据车载传感器采集本车信息和前车信息,计算前车与本车的相对横向距离;将所述的前车与本车的相对横向距离与预先设定的危险目标车辆与本车的相对横向距离的阈值进行比较,当某一前车与本车的相对横向距离小于该阈值时,即确定该前车为危险目标车辆;
6.(2)基于视觉估算路面附着系数;
7.搜集至少包括干燥的水泥路面、干燥的柏油路面、潮湿的水泥路面、潮湿的柏油路面、冰雪路面的数种不同类型的路面图片,经过人工筛选,对不同类型的路面的图片进行附着系数的标注,将其作为模型训练样本,采用迁移学习的方法对标注好的训练样本利用mobilenetv2分类网络进行训练,得到完整的路面分类模型;按照这样的五种分类,包括了绝大多数铺装路面的情况,保证了制动过程的安全性;深度学习框架基于pytorch或tensorflow
8.将车载摄像头传感器采集到的当前路面图片用mobilenetv2分类网络进行分类识别,根据不同路面与相应附着系数的对标,得到当前路面附着系数;
9.(3)基于安全距离模型确定自动紧急制动控制决策阈值;
10.根据车载传感器采集本车信息和危险目标车辆信息,以及估算出的路面附着系,生成基于安全距离的模型;
11.基于安全距离模型进行计算,安全距离模型获取的信息有本车与危险目标车辆的距离、本车加速度,两车速度和相对角度,可计算出相对加速度;根据危险目标车辆的运动状态、本车的运动状态及路面附着系数计算出临界报警距离、临界制动距离,根据临界距离和实际距离计算出与前向障碍物碰撞的危险程度,根据碰撞危险程度由轻到重将工作阶段依次分为预警阶段、轻度制动阶段、中度制动阶段和紧急制动阶段,其中预警阶段阈值为s
w
,轻度制动阶段阈值为s1,中度制动阶段阈值为s2,紧急制动阶段阈值为s3;所述的阈值s
w
、s1、s2、s3根据识别到的不同路面的附着系数进行实时调整;
12.(4)执行自动紧急制动控制决策;
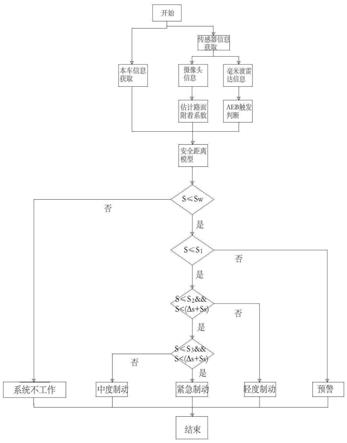
13.当本车与危险目标车辆实际距离s>s
w
时,自动紧急制动系统不工作;
14.当本车与危险目标车辆实际距离s满足s1<s≤s
w
时,自动紧急制动系统进入预警阶段,发出警报提示驾驶员及时关注道路车辆情况作出相应处理;
15.当本车与危险目标车辆实际距离s满足s2<s≤s1时,自动紧急制动系统进入轻度制动阶段,发出轻度制动控制信号控制制动缸提供轻度制动力;
16.当本车与危险目标车辆实际距离s满足s3<s≤s2,并且s<(δs+s
s
)时,自动紧急制动系统进入中度制动阶段,发出中度制动控制信号控制制动缸提供中度制动力,其中δs为制动过程中本车与危险目标车辆的位移差,s
s
为本车与危险目标车辆的最小车间距离;
17.当本车与危险目标车辆实际距离s满足s≤s3,并且s<(δs+s
s
)时,自动紧急制动系统进入紧急制动阶段,发出紧急制动控制信号控制制动缸提供紧急制动力。
18.作为优选,(1)筛选前车中的危险目标车辆过程中,计算前车与本车的相对横向距离包括以下步骤:
19.根据本车是否存在角速度或角速度是否大于一定阈值判断本车处于直道或弯道,不存在角速度或角速度小于该阈值则判断本车处于直道,存在角速度或角速度大于该阈值则判断本车处于弯道,具体阈值范围根据汽车实际所用的车载传感器确定;
20.当本车处于直道时,前车与本车之间的相对横向距离为l=s*sin(θ),其中s为前车与本车的欧拉距离,θ为前车和本车的连线与本车行驶方向的夹角,均通过车载毫米波雷达传感器获得;
21.当本车处于弯道时,前车与本车之间的纵向距离为:
22.l
ab
=|l
ac
*cos(θ)|;
23.前车与本车之间的横向距离为:
24.l
bc
=|l
ac
*sin(θ)|;
25.其中l
ac
为前车与本车之间的欧拉距离,θ为前车和本车的连线与本车行驶方向的夹角,均通过车载毫米波雷达传感器获得;本车的行驶半径v为本车的纵向速度,w为本车的横摆角速度,均通过车载传感器获得;
26.前车与本车之间的相对横向距离的计算包括以下三种情况:
27.一、对于处于本车内车道的前车:
28.前车的行驶半径为:
29.30.前车与本车之间的相对横向距离为:
[0031][0032]
二、对于处于本车外车道的前车,前车实际位置位于本车靠近弯道外侧的一侧,如图3所示:
[0033]
前车的行驶半径为:
[0034][0035]
前车与本车之间的相对横向距离为:
[0036][0037]
三、对于处于本车外车道的前车,前车实际位置位于本车靠近弯道内侧的一侧,如图4所示:
[0038]
前车的行驶半径为:
[0039][0040]
前车与本车之间的相对横向距离为:
[0041][0042]
当本车处于弯道时,需对车辆弯道工况进行判断,首先通过本车车轮转角传感器判断本车的转弯方向,其中正值为左转向,负值为右转向;
[0043]
判断左右转向后,通过毫米波雷达传入的角θ的值来进行相对横向距离的解算:
[0044]
当本车左转向时,θ为正值,用第一种和第三种情况判断相对横向距离,公式(1)或(3)的绝对值作为最后的值,(1)或(3)的绝对值相等;当θ为负值时,用第二种情况判断相对横向距离,公式(2)作为相对横向距离解算值;
[0045]
当本车右转向时,θ为负值,用第一种和第三种情况判断相对横向距离,公式(1)或(3)的绝对值作为最后的值,(1)或(3)的绝对值相等;当θ为正值时,用第二种情况判断相对横向距离,公式(2)作为相对横向距离解算值;
[0046]
解算出前车与本车在直道或弯道上的相对横向距离,以1m作为预先设定的危险目标车辆与本车的相对横向距离的阈值,将相对横向距离与阈值进行比较,小于该阈值时,即确定该前车为危险目标车辆。
[0047]
作为优选,(2)基于视觉估算路面附着系数过程中,路面类型及其附着系数的映射关系为:干燥的水泥路面为0.60~0.75,干燥的柏油路面为0.55~0.70,潮湿的水泥路面的附着系数为0.45~0.65,潮湿的柏油路面的附着系数为0.40~0.65,冰雪路面的附着系数为0.25~0.35。
[0048]
搜集不同类型的道路的图片,每种路面搜集不少于500张图片作为迁移学习的数据集,将训练集和验证集按照9:1划分,同时预留不少于100张图片作为测试集,采用
mobilenetv2进行训练。
[0049]
作为优选,(4)执行自动紧急制动控制决策过程中,自动紧急制动系统进入轻度制动阶段,发出轻度制动控制信号控制制动缸提供轻度制动主缸压力2mpa;自动紧急制动系统进入中度制动阶段,发出中度制动控制信号控制制动缸提供中度制动主缸压力4mpa;自动紧急制动系统进入紧急制动阶段,发出紧急制动控制信号控制制动缸提供紧急制动主缸压力6mpa。
[0050]
本发明的有益效果:
[0051]
本发明根据获取前车的信息、本车的信息以及当前道路情况,筛选前车中的危险目标车辆,可以应用于直道弯道组合的各类混合工况,通过筛选算法的筛选,筛选出真正的危险目标,从而进行目标的决策;当该危险目标车辆与本车的距离小于安全距离阈值,则摄像头采集当前汽车行驶过程中的路面的图片,输入训练完成的神经网络模型,从而得到当前汽车行驶的路面的类型,根据不同类型路面所对应的附着系数的映射关系,估算出当前路面附着系数;基于安全距离模型,结合当前路面附着系数确定自动紧急制动控制决策的各类阈值;根据汽车制动时的距离的阈值,结合危险目标车辆与本车实时距离,得到目前汽车在执行过程中的决策;在得到相应的决策后,执行器进行相应的执行,预警或制动。
[0052]
本发明通过计算机视觉对路面进行识别,通过路面类型与附着系数的映射关系,在汽车没有进行制动之前,通过路面的图片对路面附着系数进行估算,从而制定不同的制动策略,提前对制动策略进行调节,自动紧急制动策略应用于不同路况的场合,可以通过制动策略的自我调节,完全适应不同路面的制动工况;通过改变汽车在自动紧急制动过程中的阈值来调节汽车制动的效果,在保证汽车制动安全性的同时,又保证汽车制动后两车之间的距离相对较小,合理利用了交通空间。本发明采取的多段分级制动的方法,在保证汽车制动过程中安全性的同时,最大程度保证了汽车的舒适性。
附图说明
[0053]
图1为本发明整体控制方法流程示意图;
[0054]
图2为处于本车内车道的前车示意图;
[0055]
图3为处于本车外车道第二种情况前车示意图;
[0056]
图4为处于本车外车道第三种情况前车示意图;
[0057]
图5为本发明车辆弯道工况判断流程示意图;
[0058]
图6为本发明实施例中验证目标筛选算法本车与目标车距离图;
[0059]
图7为本发明实施例中验证目标车筛选算法制动主缸压力图;
[0060]
图8为本发明实施例中基于附着系数估计的制动策略本车与前车距离图;
[0061]
图9为本发明实施例中基于附着系数估计的制动策略制动主缸压力图;
具体实施方式
[0062]
请参阅图1
‑
9所示:
[0063]
本发明为了解决现有自动紧急制动控制方法的不足,提供一种基于视觉的路面附着系数估计的自动紧急制动控制方法,包括以下步骤:
[0064]
(1)筛选前车中的危险目标车辆;
[0065]
根据车载传感器采集本车信息和前车信息,计算前车与本车的相对横向距离;包括以下步骤:
[0066]
根据本车是否存在角速度或角速度是否大于一定阈值判断本车处于直道或弯道,不存在角速度或角速度小于该阈值则判断本车处于直道,存在角速度或角速度大于该阈值则判断本车处于弯道,具体阈值范围根据汽车实际所用的车载传感器确定;
[0067]
当本车处于直道时,前车与本车之间的相对横向距离为l=s*sin(θ),其中s为前车与本车的欧拉距离,θ为前车和本车的连线与本车行驶方向的夹角,均通过车载毫米波雷达传感器获得;
[0068]
当本车处于弯道时,前车与本车之间的纵向距离为:
[0069]
l
ab
=|l
ac
*cos(θ)|;
[0070]
前车与本车之间的横向距离为:
[0071]
l
bc
=|l
ac
*sin(θ)|;
[0072]
其中l
ac
为前车与本车之间的欧拉距离,θ为前车和本车的连线与本车行驶方向的夹角,均通过车载毫米波雷达传感器获得;本车的行驶半径v为本车的纵向速度,w为本车的横摆角速度,均通过车载传感器获得;
[0073]
前车与本车之间的相对横向距离的计算包括以下三种情况:
[0074]
一、对于处于本车内车道的前车,如图2所示,其中c点为本车位置,a点为前车位置:
[0075]
前车的行驶半径为:
[0076][0077]
前车与本车之间的相对横向距离为:
[0078][0079]
二、对于处于本车外车道的前车,前车实际位置如图3所示,其中c点为本车位置,a点为前车位置:
[0080]
前车的行驶半径为:
[0081][0082]
前车与本车之间的相对横向距离为:
[0083][0084]
三、对于处于本车外车道的前车,前车实际位置如图4所示,其中c点为本车位置,a点为前车位置:
[0085]
前车的行驶半径为:
[0086][0087]
前车与本车之间的相对横向距离为:
[0088][0089]
如图5所示,当本车处于弯道时,需对车辆弯道工况进行判断,首先通过本车车轮转角传感器判断本车的转弯方向,其中正值为左转向,负值为右转向;
[0090]
判断左右转向后,通过毫米波雷达传入的角θ的值来进行相对横向距离的解算:
[0091]
当本车左转向时,θ为正值,用第一种和第三种情况判断相对横向距离,公式(1)或(3)的绝对值作为最后的值;当θ为负值时,用第二种情况判断相对横向距离,公式(2)作为相对横向距离解算值;
[0092]
当本车右转向时,θ为负值,用第一种和第三种情况判断相对横向距离,公式(1)或(3)的绝对值作为最后的值;当θ为正值时,用第二种情况判断相对横向距离,公式(2)作为相对横向距离解算值;
[0093]
解算出前车与本车在直道或弯道上的相对横向距离,以1m作为预先设定的危险目标车辆与本车的相对横向距离的阈值,将相对横向距离与阈值进行比较,小于该阈值时,即确定该前车为危险目标车辆。
[0094]
(2)基于视觉估算路面附着系数;
[0095]
对各种类型的图片进行搜集,搜集至少包括干燥的水泥路面、干燥的柏油路面、潮湿的水泥路面、潮湿的柏油路面、冰雪路面的数种不同类型的路面图片,经过人工筛选,对不同类型的路面的图片进行附着系数的标注,路面类型及其附着系数的映射关系为:干燥的水泥路面为0.60~0.75,干燥的柏油路面为0.55~0.70,潮湿的水泥路面的附着系数为0.45~0.65,潮湿的柏油路面的附着系数为0.40~0.65,冰雪路面的附着系数为0.25~0.35;
[0096]
每种路面搜集不少于500张图片作为迁移学习的数据集,将训练集和验证集按照9:1划分,同时预留不少于100张图片作为测试集,将其作为模型训练样本,采用迁移学习的方法对标注好的训练样本利用mobilenetv2分类网络进行训练,得到完整的路面分类模型;按照这样的五种分类,包括了绝大多数铺装路面的情况,保证了制动过程的安全性;深度学习框架基于pytorch或tensorflow;
[0097]
将车载摄像头传感器采集到的当前路面图片用mobilenetv2分类网络进行分类识别,根据不同路面与相应附着系数的对标,得到当前路面附着系数;
[0098]
(3)基于安全距离模型确定自动紧急制动控制决策阈值;
[0099]
根据车载传感器采集本车信息和危险目标车辆信息,以及估算出的路面附着系数,生成基于安全距离的模型;
[0100]
基于安全距离模型进行计算,安全距离模型根据获取的本车与危险目标车辆的距离、相对速度和相对角度求出相对加速度;根据危险目标车辆的运动状态、本车的运动状态及路面附着系数计算出临界报警距离、临界制动距离,根据临界距离和实际距离计算出与前向障碍物碰撞的危险程度,根据碰撞危险程度由轻到重将工作阶段依次分为预警阶段、
轻度制动阶段、中度制动阶段和紧急制动阶段,其中预警阶段阈值为s
w
,轻度制动阶段阈值为s1,中度制动阶段阈值为s2,紧急制动阶段阈值为s3;所述的阈值s
w
、s1、s2、s3根据识别到的不同路面的附着系数进行实时调整;
[0101]
(4)执行自动紧急制动控制决策;
[0102]
当本车与危险目标车辆实际距离s>s
w
时,自动紧急制动系统不工作;
[0103]
当本车与危险目标车辆实际距离s满足s1<s≤s
w
时,自动紧急制动系统进入预警阶段,发出警报提示驾驶员及时关注道路车辆情况作出相应处理;
[0104]
当本车与危险目标车辆实际距离s满足s2<s≤s1时,自动紧急制动系统进入轻度制动阶段,发出轻度制动控制信号控制制动缸提供轻度制动主缸压力2mpa;
[0105]
当本车与危险目标车辆实际距离s满足s3<s≤s2,并且s<(δs+s
s
)时,自动紧急制动系统进入中度制动阶段,发出中度制动控制信号控制制动缸提供中度制动主缸压力4mpa,其中δs为制动过程中本车与危险目标车辆的位移差,s
s
为本车与危险目标车辆的最小车间距离;
[0106]
当本车与危险目标车辆实际距离s满足s≤s3,并且s<(δs+s
s
)时,自动紧急制动系统进入紧急制动阶段,发出紧急制动控制信号控制制动缸提供紧急制动主缸压力6mpa。
[0107]
通过实例仿真来验证基于计算机视觉的路面附着系数估计及制动策略:
[0108]
如图6、7所示,为了验证本车的危险目标筛选算法和路面附着系数识别算法,设计本车的车速为60km/h,位于中间车道,在其左侧车道前方80m处,设置一台车辆,车速10km/h,在其右侧车道前方30m处,设置一台车辆,车速10km/h,在中间车道上,距离本车50m处,设置一台车辆,车速30km/h;在附着系数为0.8的柏油路面进行测试,实验道路为长为1000m的直道。在实验过程中,汽车在4.1s时进行制动力的增加,制动主缸压力增加到2mpa,可见汽车进行制动的过程中,筛选出了真正的危险目标,该目标识别算法有效防止了aeb的误触发,最后汽车完成制动后,距离目标车辆的距离为1.5m。
[0109]
如图8、9所示,为了验证本发明的优越性,下面对无附着系数估计的自动紧急制动策略的算法与有附着系数估计的自动紧急制动的制动策略的算法分别进行仿真:
[0110]
本组仿真实验分为两次,为了突显本发明算法的优越性,采取控制变量法进行实验。两组实验除控制算法不同外,其他的仿真情况完全相同。在进行仿真时,首先对实验的环境进行设置,路面为预设附着系数为0.25的冰雪路面,目标车距离本车的距离为80m。
[0111]
目标车的车速为30km/h,本车的车速为60km/h,首先对无附着系数估计的算法进行仿真实验。通过实验结果可以看出,汽车在7.8s时开始进行制动,随后随着制动主缸压力的增大,由于冰雪路面的原因汽车的制动减速度并未开始增大,最后的结果为本车与目标车辆发生了碰撞。
[0112]
随后进行了本组实验的第二次仿真实验,对本发明具有附着系数估计的紧急制动策略进行验证。在第二次实验过程中,保证仿真的实验条件与第一次相同。在进行第二次实验时,首先利用mobilenetv2分类网络对采集的图像进行处理,识别好的附着系数传入到仿真模型中,其中的通信通过tcp协议完成,从而进行仿真。可以看出,汽车在6.6s时进行制动,并且制动主缸压力始终为2mpa,在这个过程中,汽车处于不断减速的状态,并且首次制动后,两车的最小距离为4.8m。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1