一种车辆拖挂组合的偏航控制系统的制作方法
[0001]
本实用新型涉及车辆拖挂安全行驶技术领域,特别是涉及一种车辆拖挂组合的偏航控制系统。
背景技术:
[0002]
车辆拖挂已广泛应用于交通运输领域,影响拖挂车辆安全行驶涉及到驾驶操作因素、道路设计因素、路面特性因素以及拖车装载因素,这些因素对拖挂车辆的行驶影响很大。当拖挂车辆的特殊行驶条件改变时,拖挂车辆偏航的相关风险和危险都会急剧增大,拖车的偏航或摇摆运动通常变得不可控制,使得牵引与被牵引的车辆被割开,当牵引车辆移动时,后面的部分会以一种不受控制的方式与前面的部分形成一个锐角摆动,导致偏航或侧向移动甚至拖车翻倒,造成人员伤亡、车辆损坏等重大交通事故,给人们生命财产造成重大的威胁和损失,并且严重影响交通和运输的正常运行。例如:当车辆通过拖挂组件(挂钩)拖曳拖车时,在高速或下坡行驶期间,拖车会产生振荡,在这种情况下,拖车和牵引车之间的连接将以左右和/或上下摆动的方式运动。而拖车震荡会抬高车辆的后端并左右推动车辆,从而大大增加翻车事故的风险;还有,当为免发生碰撞或车道变换而突然地转向而产生了过高的横向加速度而引起侧翻。
[0003]
目前,在一些拖挂组合车辆中,有些在牵引车辆上配备了惯性测量单元和偏航传感器,这些传感器可以提供有关车辆振动的信息,然而,因为挂车可以随着牵引车辆的振动而振动,挂车上也应该具有惯性测量单元,这一解决方案一方面导致了车辆成本上升,另一方面并非所有车辆都配置有偏航传感器,并且,这种系统缺乏鲁棒性。还有一些用于限制拖车的偏航运动的装置,例如具有阻尼作用的伸缩侧臂。这些臂沿两侧的联轴器通过车辆后部的一个末端处的球窝连接(球铰结构)连接,通过球窝连接器附接到联接器与球窝连接。这些设备的缺点是,它们持续工作,需要常规维护,容易磨损并且需要在车辆挂车和/或挂钩组件的使用寿命到期之前很长时间就需要进行更换。此外,还有一些使用检测车辆-拖车组合中拖车的摇摆运动的设备和系统,其中许多涉及非接触式装置,例如照相机,超音波装置,雷达,激光,惯性和/或磁摆传感器等,将其安装在拖车或牵引车上,由于拖挂装置暴露于空气、道路碎屑和其它恶劣的环境中,因此这些设备和系统通常可能缺乏坚固性,进而需要经常维护和更换。
[0004]
此外,就结构和安装而言,这些设备和系统通常非常昂贵或技术复杂,受到实现技术等因素的影响,因此,亟待一种改进的牵引装置和一种有效的车辆拖挂组合的偏航控制控制方案以减轻车辆与挂车的振动和摇摆角度、控制车辆拖车行驶的稳定性并最终防止翻车事故。
技术实现要素:
[0005]
针对上述情况,为克服现有技术之缺陷,本实用新型之目的在于提供一种车辆拖挂组合的偏航控制系统,其具有能够检测拖车和牵引车辆的偏航角并对拖车进行速度控
制,从而实现偏航控制的优点。
[0006]
本实用新型的上述技术目的是通过以下技术方案得以实现的:
[0007]
一种车辆拖挂组合的偏航控制系统,包括牵引车辆、被牵引车辆、拖车制动控制器和用于拖拽的牵引装置,所述牵引装置包括拖车挂钩、车辆拖钩、偏航检测装置,所述牵引装置安装在牵引车辆尾部与被牵引车辆之间,所述偏航检测装置包括致动器与致动开关,所述致动器具有至少两个结构面,且在空间上隔开构成偏航角,所述致动开关位于致动器的结构面之间。
[0008]
进一步的,所述牵引车辆包括第一制动系统,所述被牵引车辆包括第二制动系统,所述拖车制动控制器自动与第一制动系统实施通信连接,所述第二制动系统包括左侧拖车制动控制系统与右侧拖车制动控制系统,所述拖车制动控制器分别与左侧拖车制动控制系统与右侧拖车制动控制系统通信连接。
[0009]
进一步的,所述牵引车辆的尾部连接有车辆拖钩,所述被牵引车辆的前端固定连接有拖车挂钩,所述车辆拖钩的一端固定连接有拖挂加固装置,所述拖车挂钩与车辆拖钩之间固定连接有球,所述拖车挂钩通过球连接至车辆拖钩,所述致动器、致动开关安装在车辆拖钩与拖车挂钩之间
[0010]
进一步的,所述致动器是具有至少两个结构面限定的切口区域的板,且至少两个结构面在空间上隔开对应于偏航角的偏航距离,使得所述致动器与致动开关之间的接触激活致动开关。
[0011]
进一步的,所述致动器是可伸缩杆,所述致动器与致动开关间隔预定距离。
[0012]
进一步的,所述致动器连接于致动开关,所述致动开关上连接有组合开关,所述组合开关与拖车制动控制器通信连接。
[0013]
综上所述,本实用新型具有以下有益效果:能够检测拖车和牵引车辆的偏航角并对拖车进行速度控制,从而实现偏航控制,进一步期望用于检测拖车的偏航角的装置或系统更坚固耐用,方便安装在现有的挂钩组件上,易于维护并且相对便宜,通过拖挂组合装置和偏航控制系统,实现对车辆的偏航检测与控制,不仅能够对拖车偏航进行实时控制,还能够简化拖挂设备、方便安装、降低维护成本和延长使用寿命,适应多种车辆拖挂。
附图说明
[0014]
此处所说明的附图是用来提供对本实用新型的进一步理解,构成本申请的一部分,但并不构成对本实用新型的不当限定,在附图中:
[0015]
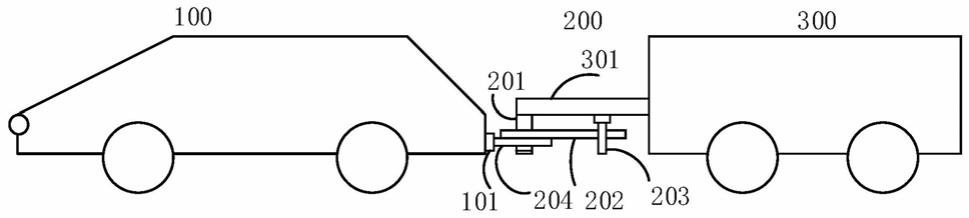
图1是实施例1中车辆拖挂组合的侧视图;
[0016]
图2是实施例1中偏航检测装置的致动器和致动开关示意图;
[0017]
图3是实施例1中致动板结构的俯视示意图;
[0018]
图4是实施例1中致动开关工作示意图;
[0019]
图5是实施例2中拖挂组合装置示意图;
[0020]
图6是实施例1中偏航控制系统系框图。
[0021]
图中,100、牵引车辆;101、车辆拖钩;200、偏航检测装置;201、球;202、致动器;2021、开口;203、致动开关;2031、接触点;2032、操纵杆;2033、支点;204、拖挂加固装置;205、切口区域;206、侧壁面;207、第一壁面;208、可伸缩杆;209、气缸; 210、托架;300、被牵
引车辆;301、拖车挂钩;4、间隙;5、偏航控制系统;501、拖车制动控制器;502、组合开关;503、第二制动系统;5031、左侧拖车制动控制系统;5032、右侧拖车制动控制系统;504、第一制动系统。
具体实施方式
[0022]
有关本实用新型的前述及其他技术内容、特点与功效,在以下配合参考附图1至附图6对实施例的详细说明中,将可清楚的呈现。以下实施例中所提到的结构内容,均是以说明书附图为参考。
[0023]
下面将参照附图描述本实用新型的各示例性的实施例。
[0024]
实施例1:一种车辆拖挂组合的偏航控制系统,如图1所示,车辆拖挂组合偏航控制系统包括具有自身动力装置的牵引车辆100、无动力装置的被牵引车辆300、用于牵引的牵引装置,其中,牵引装置包括拖车挂钩301、车辆拖钩101、偏航检测装置200、电源装置组成,牵引装置安装在牵引车辆尾部与被牵引车辆之间,偏航检测装置用于偏航角度检测包括致动器202和致动开关203,电源装置为被牵引车辆及牵引装置供电。
[0025]
如图1所示,为牵引车辆100、被牵引车辆300和偏航检测装置200,被牵引车辆 300包括拖车挂钩301,牵引车辆100包括车辆拖钩101,车辆拖钩101的一端固定连接有拖挂加固装置204,拖车挂钩301与车辆拖钩101之间固定连接有球201,拖车挂钩301通过球201连接至车辆拖钩101。
[0026]
如图1所示,牵引车辆100可以是能够拖曳被牵引车辆300的任何类型的车辆,例如卡车,汽车等,此外,被牵引车辆300可以是能够被拖曳的任何类型的车辆,例如露营车,多功能拖车,休闲车等。
[0027]
如图1所示,偏航检测装置200包括致动器202和致动开关203,致动器202采用了致动板的形式,并安装至拖挂加固装置204顶部,拖车挂钩301底部,且安装在球201下方的合适球颈处并由其固定,致动开关203安装至拖车挂钩301的底部,并与致动器202配合以检测被牵引车辆300相对于牵引车辆100的偏航位移。
[0028]
如图1、图2所示,致动器202和致动开关203,致动器202包括开口2021,以接收从球201延伸的固定螺纹杆,致动器202包括由第一壁面207和两个侧壁面206限定的切口区域205,侧壁面206彼此间隔开第一壁面207的长度。
[0029]
如图3所示,侧壁面206可以从第一壁面207以不平行且不垂直的角度延伸。
[0030]
如图1、图2所示,第一壁面207的长度与侧壁面206的角度相结合提供了角度极限,即为最大偏航角。
[0031]
如图4所示,致动开关203与能围绕支点2033左右旋转的操纵杆2032配合形成接触开关,接触机构包括接触点2031、操纵杆2032和支点2033,操纵杆2032围绕支点2033 旋转以与两个触点2301之一接触,当操纵杆2032与任一触点2301接触时形成闭合电路,信号s1或s2被传送到组合开关。
[0032]
如图1、图6所示,致动器202具有至少两个结构面,这些结构面在空间上隔开由偏航角限定的偏航距离,致动开关203至少一部分位于结构面之间,在被牵引车辆300相对于牵引车辆100超过最大偏航角时,致动开关203被激活,拖车制动控制器501间接接收来自致动开关203的信号使被牵引车辆300减速。
[0033]
实施例2:如图1、图5所示,牵引装置包括被牵引车辆300相应的拖车挂钩301、牵引车100的牵引基座101、致动器202和致动开关203,牵引装置200安装到拖车拖车挂钩301和牵引基座101中间,牵引装置还包括托架210和从托架210朝着车辆牵引基座101 延伸的可伸缩杆208,可伸缩杆208连接到托架的气缸209,可伸缩杆208和气缸209采取可伸缩减震器的形式。
[0034]
如图1、图5所示,可伸缩杆208与安装在车辆牵引基座101上的致动开关203间隔开,致动开关203连接至牵引基座101上,牵引基座101被构造成使得致动开关203分别与可伸缩杆208对准。
[0035]
如图1、图5所示,当被牵引车辆300相对于牵引车辆100偏航时,如果被牵引车辆300超过预定偏航角,则可伸缩杆208可以接触制动致动开关203,可伸缩杆208和致动开关203之间的间隙4可用于校准预定偏航角,因此,间隙4越大,则通过可伸缩杆208激活致动开关203所允许的最大偏航角越大。
[0036]
如图1、图6所示,提供一种偏航控制系统500,该系统用于当被牵引车辆100超过如上所述的预定偏航角时实现被牵引车辆300的受控制动,偏航位移组合开关502用于处理变换致动开关的信号使其满足拖车制动控制器的要求,可以是具有简单逻辑组合的开关。
[0037]
如图1、图6所示,拖车制动控制器501与组合开关502通信连接,用以接收偏航检测信号,第二制动系统503包括左侧拖车制动系统5031与右侧拖车制动系统5032,拖车制动控制器501又与第一制动系统504和左侧拖车制动系统5031、右侧拖车制动系统5032通信,指示左侧拖车制动系统5031、右侧拖车制动系统5032根据被牵引车辆300相对于牵引车辆100向右还是向左或向左摇摆来施加差动制动压力,拖车制动控制器501将制动信息提供给左侧拖车制动系统5031与右侧拖车制动系统5032。
[0038]
如图1、图6所示,左侧拖车制动系统5031与右侧拖车制动系统5032操作以使被牵引车辆300减速,当组合开关502断开时,致动开关203不能与左侧拖车制动系统5031与右侧拖车制动系统5032通信,并且也无法与拖车制动器控制器501通信。
[0039]
以上所述是结合具体实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型具体实施仅局限于此;对于本实用新型所属及相关技术领域的技术人员来说,在基于本实用新型技术方案思路前提下,所作的拓展以及操作方法、数据的替换,都应当落在本实用新型保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1