用于运行制动系统的方法和设备、制动系统以及车辆与流程
用于运行制动系统的方法和设备、制动系统以及车辆
1.本发明涉及一种用于运行车辆的、尤其是机动车辆的制动系统的方法,其中,所述制动系统具有至少一个电的执行器、尤其是制动力放大器,所述至少一个电的执行器能够被操控用于产生制动力,其中,所述执行器能够通过自主的行驶系统并且根据所述车辆的制动踏板的制动踏板操作来操控,并且其中,当所述执行器不仅通过所述自主的行驶系统也通过制动踏板操作来操控时,就引入一种紧急制动过程。
2.本发明此外涉及一种用于运行这样的制动系统的设备、一种制动系统以及一种具有这样的制动系统的车辆。
背景技术:
3.从背景技术已知开头所提到的类型的方法。安全性制动系统能够实现自主地被引入的下述紧急制动过程:例如当危险被环境传感装置识别然而没有或者还没有被所述车辆的驾驶员识别时所述紧急制动过程就起作用(greifen)。如此就例如已知:借助于传感装置来监测所述车辆对于在前方行驶的车辆或者另外的物品的间距,以便在识别即将发生的碰撞的情况下引入紧急制动。对于所述紧急制动而言,在尽可能短的时间内建立尽可能高的制动压力。在现代的具有机电式的制动力放大器的机动车辆中,所述制动压力通过所述制动力放大器的电操控来建立。在此,这能够此外导致:在没有驾驶员协助的情况下移置制动踏板。在借助于所述制动力放大器自主地执行的制动中,从在制动踏板与所述制动力放大器的执行器元件之间的、由于机械式的止挡所引起的一定的行程差(differenzweg)起,通过所述制动力放大器或者所述执行器元件、例如活塞来一同牵拉所述制动踏板。为此,所述制动力放大器具有能运动地被支承的执行器元件,所述执行器元件通过其移置来提高制动力或制动压力,并且机械地与所述制动踏板通过机械式的止挡相耦接或者能够耦接。为了避免不必要地引入紧急制动过程,已知的是:仅仅当驾驶员也操作所述制动踏板时,才引入所述紧急制动过程。因此,为了对于紧急制动的必要性进行可信度验证,就考虑了所述制动踏板的操作。这使得下述情况变得必要:在紧急制动过程期间或者在所述执行器的通过自主的行驶系统所进行的操控期间,也识别通过驾驶员所进行的所述制动踏板操作。为此,探测了在所述制动踏板行程与所述执行器元件的行程之间的差来作为行程差。如果驾驶员操作了制动踏板,那么就改变了通过所述机械式的止挡所限定的制动行程。这种被识别的改变用于识别所述制动踏板操作,并且因此用于触发或者释放所述紧急制动过程。
技术实现要素:
4.按照本发明的具有权利要求1的特征的方法具有下述优点:确保了对于所述制动踏板操作的已改进的识别,所述识别相对于所述制动系统的机械的公差是更可靠的,并且由此也在非常小的行程差范围上可靠地识别所述制动踏板的通过驾驶员所进行的操作。按照本发明地为此设置了:通过所述自主的行驶系统所进行的操控利用一种变化的验证信号来叠加;监测在所述执行器的执行器元件与所述制动踏板之间的行程差;并且当所述行程差变化时,在通过所述自主的行驶系统所进行的操控期间识别所述执行器通过制动踏板操
作所进行的操控。只要用户没有操作所述制动踏板,那么因此就仅仅通过所述行驶系统来操控所述执行器。当用户没有操作所述制动踏板时,由于机械地所限定的最大的行程差使得所述行程差就保持在恒定的值上。当已经达到了所述机械式的止挡时,所述验证信号——该验证信号叠加了所述执行器的操控——导致了规定的恒定的值,由于所述值使得所述行程差能够不被干扰。然而一旦驾驶员操作了所述制动踏板,并且由此改变、尤其是减小所述行程差,那么由于变化的验证信号现在就通过该验证信号的变化相应地影响所述行程差。因此能够在所述行程差中识别出存在着所述验证信号。因此确保了所述制动踏板操作的可靠的识别。一旦在通过所述行驶系统进行的操控时所述行程差是不均匀的,那么这就意味着:驾驶员同样已经操作了制动踏板并且所述系统的机械式的止挡会被离开。因此可靠地对于所述自主的行驶系统的紧急制动操控进行了可信度验证。
5.按照本发明的优选的改进方案,如此规定所述验证信号:使得所述验证信号区别于制动踏板操作的在时间上的变化曲线。尤其如此规定所述验证信号:使得通过制动踏板操作不能复制所述验证信号。由此确保了作用于所述行程差的验证信号与制动踏板操作的明确的区别。
6.此外优选地设置了:所述验证信号被规定为矩形信号、锯齿信号、三角信号或者正弦形的信号。由此给出与下述操控信号的可靠的区别:所述操控信号能够由用户通过操作所述制动踏板来施行。
7.此外优选地设置了:当所述行程差的变化曲线与所述验证信号的变化曲线对应时,在通过所述自主的行驶系统所进行的操控期间识别到通过制动踏板操作所进行的操控。当所述行程差的变化在所述时间期间来观察而对应于或者几乎对应于所述验证信号的变化时,那么就在所述行程差中识别所述验证信号,并且因此推断出对于所述制动踏板的操作。
8.优选地规定将额定体积流、额定速度、额定马达力矩和/或额定电流来作为验证信号。所述验证信号和该验证信号的验证能够因此以不同的方式和方法引入到所述总系统中。
9.按照本发明的具有权利要求6的特征的设备的特征在于一种控制器,所述控制器被专门地设定用于:在常规的使用中执行或者实施按照本发明的方法。由此得出已提到的优点。
10.按照本发明的具有权利要求7的特征的制动系统的特征在于所述按照本发明的设备。
11.按照本发明的具有权利要求8的特征的车辆、尤其是机动车辆的特征在于按照本发明的制动系统。
12.由此分别得出已提到的优点。其它的优点以及优选的特征和特征组合尤其从前面的描述以及从权利要求书得出。
13.接下来应该借助于附图来进一步解释本发明。
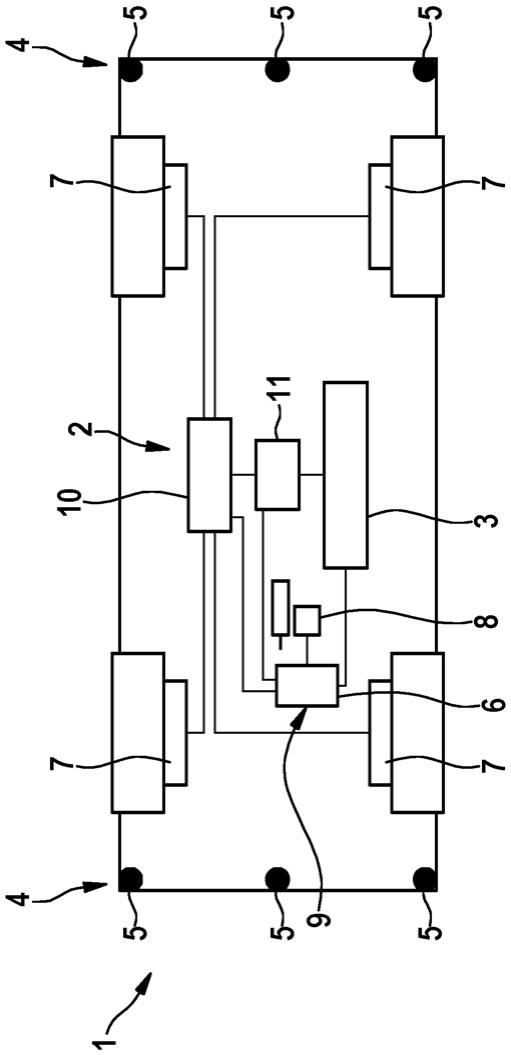
14.其中:图1以简化的俯视图示出了机动车辆;并且图2a和2b示出了用于解释有利的方法的图表,所述方法用于运行所述机动车辆的制动系统。
15.图1以简化的俯视图示出了机动车辆1,所述机动车辆具有制动系统2以及自主的行驶系统3。所述自主的行驶系统3被构造用于:根据所选择的行驶目的地将机动车辆1全自主地引导到所述行驶目的地。在此,所述行驶系统3可选地与环境传感装置4相连接,所述环境传感装置具有多个环境传感器5,例如雷达
‑
、超声波
‑
或激光传感器,所述多个环境传感器监测机动车辆1的环境是否有潜在危险。如果例如所述行驶系统3借助于环境传感装置4探测到所述机动车辆1以下述速度运动到物品或者在前方行驶的车辆上:所述速度能够导致所述机动车辆1碰撞到所述物品上,那么所述行驶系统3就被构造用于操控所述制动系统2,以便引入用于使得机动车辆1减速的紧急制动,通过所述紧急制动应当避免所述碰撞。
16.所述制动系统2当前具有机电式的制动力放大器6,能够以电的方式操控所述机电式的制动力放大器以提高在制动系统2中的液压压力,以便在车轮制动器7处提供已提高的制动压力或者已提高的制动力。在此,根据制动踏板8的通过机动车辆1的驾驶员所进行的操作来操控所述制动力放大器6。所述制动力放大器6因此表示了一种用于提高所述制动力的执行器9。
17.所述制动力放大器6此外与所述行驶系统3在信号技术上相连接,以使得所述行驶系统3也能够为此操控所述制动力放大器6,以便尤其能够引入或者执行自主的制动过程,正如前面已经解释的那样。然后由制动力放大器6所产生的液压压力就提供给在图1中通过方框10简化地示出的一个或多个制动回路。在此,所述机动车辆1的控制器11以接下来所描述的方式和方法来监测所述制动力放大器6以及所述行驶系统3和所述制动踏板8,以便对于通过行驶系统3的紧急制动的请求来进行可信度验证。如果通过使得所述行驶系统对于用于提高制动力的执行器6进行操控来使得所述行驶系统3请求一紧急制动,那么所述控制器11就确保:通过具有变化的曲线的验证信号来叠加所述行驶系统3的操控信号。
18.为此,图2a以简化的图表示出了验证信号vs在所述行驶系统3的制动请求信号b1上的变化曲线。所述验证信号vs被规定为具有正弦形的变化曲线的信号。但是替代地也考虑所述验证信号的矩形变化曲线、锯齿变化曲线或者三角形的变化曲线。如此获得所述验证信号vs:使得所述验证信号在其动力学方面不能被人类驾驶员通过对于制动踏板的操作所引起。通过所述变化,使得所述验证信号叠加了实际的请求信号并且导致了所规定的制动值。在此,通过所述行驶系统在所述机电式的制动力放大器6处的体积流请求来实施所述制动请求。所述验证信号vs因此涉及体积流请求v。
19.所述制动踏板8如此与所述执行器9相耦接:使得在请求提高制动力矩时所述执行器9的执行器元件从存在预先确定的行程差x起通过机械式的止挡来带动所述制动踏板8。在此谈及在所述执行器元件与所述制动踏板之间的负的行程差。如果存在正的行程差x——即在0之上,那么驾驶员通过操作所述制动踏板就比所述自主的行驶系统3请求了要高的压力,这导致实施了驾驶员的已被提高了的压力请求。如果所述行程差x表明了在最小值与o之间的值,那么就推断出:尽管驾驶员已经操作了踏板,然而所述自主的行驶系统3规定了所述制动的强度。图2b示出了在所述时间t期间与按照图2a的体积流请求相对应的行程差x。
20.对于存在着通过驾驶员进行的踏板操作的情况,能够在所述行程差(信号差)中识别所述验证信号的有特性的变化曲线。只要还没有达到所述机械式的止挡(xmax),就能够在所述请求中并且因此在所述行程差x中识别所述验证信号的变化。以这种方式即使在制
动踏板上的小的踏板力的情况下也能够识别所述驾驶员。只有当除了通过行驶系统3进行的请求之外附加地通过探测到所述验证信号的有特性的变化曲线而在所述行程差x中识别了对于所述制动踏板8的操作时,才对于所述行驶系统3的紧急制动请求进行可信度验证并且执行所述紧急制动请求。如果添加所述有特性的信号,那么所述行程差x仅仅当已经达到了所述机械式的止挡时才恒定地等于所规定的值。在这种情况下,驾驶员并不操作所述踏板。在所有另外的情况下,通过对于非
‑
恒定的行程差x、即不均匀的行程差x进行评估,能够毫无疑问地推断出所述制动踏板通过驾驶员进行的操作。然后尤其在所述行程差中示出了所述验证信号的正弦形的变化曲线,正如在图2b中通过正弦形的叠加线所示出的那样。因此能够直接地从非恒定的行程差(信号差)推断出驾驶员的操作。优选地考虑并且过滤所述信号的噪声,以便避免误解。因为所述方法不依赖于机械的公差,所以由此提高了所述制动踏板操作识别的使用范围,正如在图2b中通过区域i所表明的那样。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1