一种燃料电池系统的空压机转速修正方法与流程
1.本发明涉及燃料电池技术领域,具体是一种燃料电池系统的空压机转速修正方法。
背景技术:
2.以动力电池作为主要驱动能源、燃料电池作为增程器的方案,基于燃料电池系统用作给整车动力电池充电,能够大大延长电动汽车的续航能力,因此在现有燃料电池中作为教佳的应用方向。燃料电池系统通过识别整车动力电车的需求功率,而进行自身的功率输出,从而通过空压机转速调节控制燃料反应。燃料电池系统的空压机转速主要是通过需求空气流量与实际空气流量偏差进行调节的,其次由于空气流量和空气压力具有对应关系,所以空气压力在一定程度上也影响空压机转速,从而实现空气流量、空气压力双环控制空压机转速。
3.专利公开号“cn111180769a”公开了一种空压机的防喘振控制方法及系统,通过根据燃料电池堆的需求功率指令以及理想发电性能计算得到燃料电池堆的期望流量值和期望压力值;对期望流量值和期望压力值进行非喘振限幅得到限幅流量值和限幅压力值;输入限幅流量值以及限幅压力值至pi控制器控制空压机气体压力,从而实现空压机流量、压力的双环控制。
4.此外,专利公开号“cn110911721a”公开了一种燃料电池控制方法及燃料电池控制装置,通过获取燃料电池需求输出功率和电堆阴极进出口压力差值,根据需求输出功率以及所述需求输出功率与空压机工作参数的对应值对空压机进行控制,以使空气供给量匹配所述需求输出功率;并根据燃料电池电堆阴极进口压力及达到所述需求的燃料电池输出功率时,质子交换膜阴极侧需要维持的压力对背压阀进行控制,以使燃料电池电堆阴极压力满足所述燃料电池质子交换膜的压力平衡需求。
5.以上的技术中,随着燃料电池系统运行时间的增加,燃料电池系统不可避免会出现性能衰减。由于上述技术均没有考虑到燃料电池电堆性能会产生衰减,那么原有的空气流量、空气压力将无法使系统实际输出功率与需求输出功率一致,导致修正空压机转速得到的空气流量往往会出现偏差,从而导致配气不均,加速整车电池衰减的现象。
技术实现要素:
6.针对现有技术存在的问题,本发明提供了一种燃料电池系统的空压机转速修正方法,通过提出修正系数最终实现修正空压机转速,解决燃料电池系统由于电堆衰减导致实际输出功率与需求输出功率偏差的问题,能够提高配气的控制精度,从而增加整车动力电池的使用寿命。
7.为实现上述发明目的,本发明的技术方案如下:
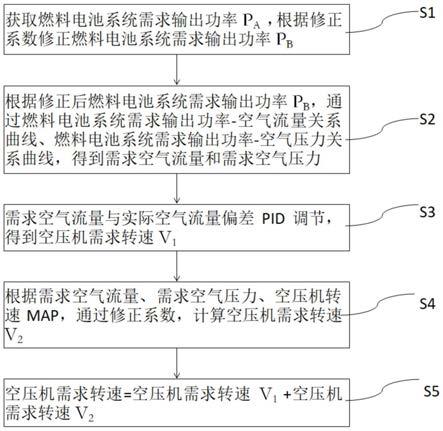
8.s1:当整车动力电池soc下降到一定阈值时,获取燃料电池系统的需求输出功率p
a
,并根据修正系数修正系统需求输出功率p
b
=修正系数
×
p
a
;
9.s2:根据修正后的需求输出功率p
b
,通过燃料电池系统需求输出功率
‑
空气流量关系曲线、燃料电池系统需求输出功率
‑
空气压力关系曲线,得到需求空气流量和需求空气压力;
10.s3:计算需求空气流量和实际空气流量偏差,然后进行pid调节处理,得到空压机需求转速v1;
11.s4:根据需求空气压力和需求空气流量,查阅需求空气流量、需求空气压力、空压机转速关系map图得到空压机需求转速v
2map
,根据修正系数,计算空压机需求转速v2=修正系数
×
空压机需求转速v
2map
;
12.s5:将空压机需求转速v1与空压机需求转速v2相加,得到修正后的空压机需求转速最终值。
13.具体的,所述修正系数的计算方法如下:
14.燃料电池系统首次运行到额定功率p0,记录此工况下的电流i0和电压u0;燃料电池系统使用一段时间后,将燃料电池系统拉载至电流i0,记录此工况下的u1,并计算此工况下的功率p1(p1=i0×
u1);修正系数=p0÷
p1。
15.本发明的有益效果:
16.1.本发明能够通过当燃料电池系统运行一段时间出现性能衰减后,根据整车控制器发送给系统需求输出功率进行相应修正,并查询燃料电池系统需求输出功率
‑
空气流量曲线、燃料电池系统需求输出功率
‑
空气压力曲线,输出需求空气流量和需求空气压力调节空压机转速,通过修正空压机转速提高空气流量和空气压力,使系统实际输出功率与需求输出功率一致,解决燃料电池系统由于电堆衰减导致实际输出功率与需求输出功率偏差的问题,能提高配气的控制精度,增加了整车动力电池的使用寿命。
17.2.本发明将衰减功率进行相应修正的同时,通过空气流量和实际空气流量偏差,然后进行pid调节处理,两者相结合控制空压机转速,使得转速修正更为精确。
附图说明
18.图1为本发明实施例提供的一种燃料电池系统的空压机转速修正方法的流程图。
19.图2为本发明实施例提供的一种燃料电池系统的空压机转速修正方法的部件连接示意图。
20.图3为本发明实施例提供的一种燃料电池系统的空压机转速修正方法的需求输出功率
‑
空气压力和需求输出功率
‑
空气流量曲线示意图。
21.图4为本发明实施例提供的一种燃料电池系统的空压机转速修正方法的需求空气流量、需求空气压力、空压机转速关系map图。
具体实施方式
22.为详细说明本发明的技术内容、所实现目的及效果,以下结合实施例并配合附图予以说明。在实施例的描述中,需要理解的是,指示方位或位置关系的术语为基于附图所示的方位或位置关系,仅是为了便于描述本实施例和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作因此不能理解为对本发明的限制。
23.本实施例的一种燃料电池系统的空压机转速修正方法,主要通过整车控制器vcu、燃料电池系统控制器fccu以及空气流量传感器完成,其部件连接关系可以如图2的现有技术所示,其中:
24.整车控制器vcu通过can网路与燃料电池系统控制器fccu通讯,用于发送给燃料电池系统控制器fccu需求输出功率;
25.空气流量传感器将测得的实际空气流量反馈给燃料电池系统控制器fccu,用于计算需求空气流量和实际空气流量偏差;
26.燃料电池系统控制器fccu用于处理计算、对比步骤,最后将得到的修正后空压机转速发送给空压机,空压机根据fccu发送的需求转速进行调节,使其实际转速与需求转速一致。
27.具体如图1所示,包括下列步骤:
28.s1:首先确定修正系数,当燃料电池系统首次运行到额定功率p0=35.2kw时,整车控制器vcu记录此工况下的电流i0=320a和电压u0=110v;每行驶3000km后,将燃料电池系统拉载至电流i0=320a,继续记录此工况下的u1=105v,通过计算此工况下的功率p1=320a
×
105v=33.6kw,得到修正系数=p0÷
p1=1.0476;
29.当整车动力电池剩余电量soc下降到40%的阈值时,整车控制器vcu获取燃料电池系统的需求输出功率p
a
=28.64kw,然后通过can网路发送给燃料电池系统控制器fccu,燃料电池系统控制器fccu根据修正系数修正系统需求输出功率p
b
=修正系数
×
p
a
=1.0476
×
28.64kw=30kw;
30.s2:修正后的需求输出功率p
b
=30kw,燃料电池系统控制器fccu根据燃料电池系统设计的参考曲线,参考图3燃料电池系统需求输出功率
‑
空气流量关系曲线、燃料电池系统需求输出功率
‑
空气压力关系曲线,得出需求空气流量和需求空气压力,得到需求空气压力=1500mbar,需求空气流量=33.53g/s;
31.s3:此时燃料电池系统控制器fccu进行计算需求空气流量和实际空气流量偏差,然后进行pid调节处理,pid为比例
‑
proportion、积分
‑
integral、微分
‑
differential控制方法,将部件的转速由当前转速调至目标转速;pid调节为动态调节,且与pid设置参数相关,通过设置参数p=2000,i=0,d=0,若空气流量传感器将某一时刻实际空气流量=23.53g/s得出的动态调节反馈给燃料电池系统控制器fccu,而需求空气流量=33.53g/s;那么空压机需求转速v1=(33.53
‑
23.53)@pid=20000rpm;
32.s4:燃料电池系统控制器fccu根据需求空气压力和需求空气流量,查阅需求空气流量、需求空气压力、空压机转速关系map图,如图4所示,x坐标是空气需求压力,y坐标是空压机转速,z坐标是空气需求流量。即图中对应不同空压机转速下,空气流量与空气压力的变化关系。需求空气压力=1500mbar,需求空气流量=33.53g/s,通过图中特定的对应关系可以得出空压机需求转速v
2map
=73683rpm;
33.根据修正系数,计算空压机需求转速v2=修正系数
×
空压机需求转速v
2map
=1.0476
×
73683rpm=77191rpm;
34.s5:因此,修正后的空压机需求转速最终值为空压机需求转速v1+空压机需求转速v2=97191rpm,最后由燃料电池系统控制器fccu将得到的修正后空压机转速发送给空压机,空压机根据燃料电池系统控制器fccu发送的需求转速进行调节,使其实际转速与需求
转速一致。
35.上述实施例通过系统运行一段时间出现性能衰减后,根据整车控制器发送给系统需求输出功率进行相应修正,从而修正空气流量、空气压力,并通过修正空压机转速提高空气流量和空气压力调节空压机转速,加上对需求空气流量和实际空气流量偏差进行pid调节处理,最终使系统实际输出功率与需求输出功率一致。综上,本实施例解决燃料电池系统由于电堆衰减导致实际输出功率与需求输出功率偏差的问题,能够提高配气的控制精度,从而增加了整车动力电池的使用寿命,最终达到本发明的目的。
36.虽然,上文中已经用具体实施方式,对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1