用于带拖车车辆的自动倒车的控制方法和控制系统与流程
1.本发明涉及一种用于带拖车车辆的自动倒车的控制方法以及用于执行这样的控制方法的控制系统。
背景技术:
2.在日常行驶过程中,带拖车的卡车或带拖车的汽车的倒车被视为是比较困难的。例如在平行泊车或倒车入库的情况下,驾驶员需要反向转动方向盘来控制拖车的转向,这尤其对于不熟练的人来说是非常困难的。另外,在后退时拖车会相对于牵引车绕铰接点进行摆动,如果牵引车与拖车之间的拖挂角度超过极限值,则有可能发生拖车折叠的危险状况。
3.当前,与自动泊车有关的研究和专利中,缺少将带拖车倒车控制纳入自动泊车的方案。在带拖车的倒车控制的已有方案中,使用常见的mpc(model predictive control,模型预测控制)的方法计算量较大;并且在后退过程中仅仅根据拖挂角度进行倒车控制会导致跟踪不及时,或仅仅根据转弯半径进行倒车控制会导致拖挂角度超过极限值。总体上,没有连续的倒车与轨迹跟踪实现自动泊车的相关方案。
技术实现要素:
4.根据本发明的一个方面所提出的任务是,提供一种用于带拖车车辆的自动倒车的控制方法,所述控制方法能够有效地避免发生拖车折叠的危险状况。
5.根据本发明的一个方面所提出的用于带拖车车辆的自动倒车的控制方法,包括有如下步骤:
6.s1:建立所述带拖车车辆的线性二自由度的运动学模型;
7.s2:给定拖车与牵引车的设定拖挂角度
8.s3:给定拖车的目标路径;
9.s4:检测拖车与牵引车的当前的实际拖挂角度θ;
10.其中,所述控制方法还包括有如下步骤:
11.s5:将所述实际拖挂角度θ与所述设定拖挂角度进行比较,在所述目标路径的后退区段中,如果所述实际拖挂角度θ达到或超过所述设定拖挂角度则s51:借助于拖挂角度控制器基于所述实际拖挂角度θ与所述设定拖挂角度来计算牵引车前轮转向角δ
v
,否则s52:借助于转弯半径控制器基于所述实际拖挂角度θ和拖车的目标转弯半径r
t
来计算牵引车前轮转向角δ
v
,基于所述前轮转向角δ
v
来控制牵引车的方向盘转角。
12.根据本发明的一个方面所提出的用于带拖车车辆的自动倒车的控制方法,在步骤s2中所给定的设定拖挂角度小于牵引车与拖车的极限拖挂角度θ
max
,如果在步骤s5中判定所述实际拖挂角度θ达到或超过所述设定拖挂角度则执行步骤s6:借助于所述转弯半径控制器对拖车与牵引车的拖挂角度进行预测,如果拖车与牵引车的拖挂角度具有增加的趋
势,则执行步骤s51,如果拖车与牵引车的拖挂角度具有降低的趋势,则执行步骤s52。
13.根据本发明的一个方面所提出的用于带拖车车辆的自动倒车的控制方法,借助预瞄跟踪方法来计算拖车在后退区段中的目标转弯半径r
t
:
[0014][0015]
其中,s为偏移距离,所述偏移距离为拖车的轮轴中点与预瞄点之间的距离在垂直于所述纵向轴线的横向轴线上的分量;
[0016]
d为预瞄距离,所述预瞄距离为拖车的轮轴中点与预瞄点之间的距离在拖车纵向轴线上的分量。
[0017]
根据本发明的一个方面所提出的用于带拖车车辆的自动倒车的控制方法,步骤s52的牵引车前轮转向角δ
v
的计算方式为:
[0018][0019]
其中,l
v
为牵引车的驱动轮到转向轮的距离;
[0020]
c
v
为牵引车的驱动轮到铰接点的距离;
[0021]
c
t
为拖车的轮轴中心到铰接点的距离。
[0022]
根据本发明的一个方面所提出的用于带拖车车辆的自动倒车的控制方法,步骤s51的牵引车前轮转向角δ
v
的计算方式为:
[0023][0024]
其中,k为常数。
[0025]
根据本发明的一个方面所提出的用于带拖车车辆的自动倒车的控制方法,所述目标路径还包括有前进区段,所述控制方法还包括步骤s7:在所述前进区段时,所述拖挂角度控制器基于实际拖挂角度θ与目标拖挂角度θ
t
来计算牵引车前轮转向角δ
v
。
[0026]
根据本发明的一个方面所提出的用于带拖车车辆的自动倒车的控制方法,借助预瞄跟踪方法来计算拖车在前进区段时的目标拖挂角度θ
t
,所述目标拖挂角度θ
t
如下:
[0027][0028]
其中,c
t
为拖车的轮轴中心到铰接点的距离;
[0029]
s为偏移距离,所述偏移距离为拖车的轮轴中点与预瞄点之间的距离在垂直于所述纵向轴线的横向轴线上的分量;
[0030]
d为预瞄距离,所述预瞄距离为拖车的轮轴中点与预瞄点之间的距离在拖车纵向轴线上的分量。
[0031]
根据本发明的一个方面所提出的用于带拖车车辆的自动倒车的控制方法,步骤s7的牵引车前轮转向角δ
v
的计算方式为:
[0032][0033]
其中,k为常数,是一种比例系数,表示牵引车与拖车的拖挂角度的响应速度;
[0034]
l
v
为牵引车驱动轮到转向轮的距离;
[0035]
c
t
为拖车的轮轴中心到铰接点的距离;
[0036]
c
v
为牵引车的驱动轮到铰接点的距离;以及
[0037]
当计算出的目标拖挂角度θ
t
大于所述设定拖挂角度时,令所述目标拖挂角度θ
t
等于所述设定拖挂角度
[0038]
根据本发明的一个方面所提出的用于带拖车车辆的自动倒车的控制方法,拖车与牵引车的极限拖挂角度θ
max
的计算方式为:
[0039][0040]
其中,r
v
为牵引车后轮最小转弯半径;
[0041]
r
h
为铰接点处的最小转弯半径;
[0042]
l
v
为牵引车的驱动轮到转向轮的距离;
[0043]
c
v
为牵引车的驱动轮到铰接点的距离;
[0044]
c
t
为拖车的轮轴中心到铰接点的距离;
[0045]
δ
vmax
为最大牵引车前轮转向角。
[0046]
根据本发明的一个方面所提出的用于带拖车车辆的自动倒车的控制方法,所述目标路径具有前进区段和后退区段,所述前进区段与所述后退区段的交点为第一终点,并且所设定的拖车轮轴中点的最终位置为第二终点,在自动倒车过程中检测拖车轮轴中点是否到达所述第一终点或所述第二终点,当到达第一终点或第二终点时,发出改变行驶方向或停车的警告。
[0047]
根据本发明的一个方面所提出的用于带拖车车辆的自动倒车的控制方法,采用圆形区域对所述第一终点或所述第二终点进行检测,所述第一终点或第二终点位于所述圆形区域的圆周上并且所述目标路径穿过所述圆形区域的中心,在拖车轮轴中点进入所述圆形区域内之后,当所述拖车轮轴中点离开所述圆形区域时发出改变行驶方向或停车的警告。
[0048]
此外,本发明还提出一种用于执行这样的用于带拖车车辆的自动倒车的控制方法的控制系统,所述控制系统具有彼此通信连接的
[0049]
检测模块,用于检测拖车与牵引车的实际拖挂角度;
[0050]
比较模块,用于将所检测的拖挂角度与所述设定拖挂角度进行比较;
[0051]
拖挂角度控制器,用于基于所述实际拖挂角度与所述设定拖挂角度来计算牵引车前轮转向角;
[0052]
转弯半径控制器,用于基于所述实际拖挂角度和拖车的目标转弯半径来计算牵引
车前轮转向角。
[0053]
根据本公开的用于带拖车车辆的自动倒车的控制方法、控制系统和车辆的有益之处包括:当拖车与牵引车的拖挂角度超出给定的设定拖挂角度时,剥夺转弯半径控制器的控制权,通过拖挂角度控制器将拖挂角度保持在一定的范围内,根据本公开的控制方法能够有效地防止在倒车过程中发生拖车折叠的危险情况。
附图说明
[0054]
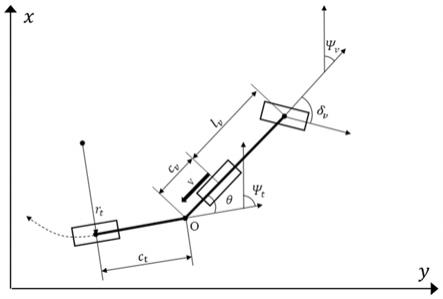
图1示出拖车与牵引车的线性二自由度的运动学模型;
[0055]
图2示出根据本发明的第一实施例的在后退区段中的控制方法的流程图;
[0056]
图3示出根据本发明的第二实施例的在后退区段中的控制方法的流程图;
[0057]
图4示出带拖车车辆相对于目标路径的示意性的位形图示;
[0058]
图5示出根据本发明的在前进区段中的控制方法的流程图;
[0059]
图6示出对目标路径的第一终点和第二终点的检测的示意性的图示;以及
[0060]
图7示出根据本发明的控制系统的模块框图。
具体实施方式
[0061]
容易理解,根据本发明的技术方案,在不变更本发明实质精神的条件下,本领域的一般技术人员可以提出可相互替换的多种结构方式以及实现方式。因此,以下具体实施方式以及附图仅是对本发明的技术方案的示例性说明,而不应当视为本发明的全部或者视为对本发明技术方案的限定或限制。
[0062]
在本说明书中提到或者可能提到的上、下、左、右、前、后、正面、背面、顶部、底部等方位用语是相对于各附图中所示的构造进行定义的,它们是相对的概念,因此有可能会根据其所处不同位置、不同使用状态而进行相应地变化。所以,也不应当将这些或者其他的方位用语解释为限制性用语。
[0063]
首先,应该对“带拖车车辆”进行界定,其是指具有起牵引作用的、具有动力源的牵引车以及无动力源的拖车。带拖车车辆能够实施为一体式构造有拖车(还能够被称为挂车)的卡车。另外,其还能够实施为单独进行构造的拖车和牵引车的组合,所述组合在工业应用中还能够被称为拖挂式移动机器人,以用于在车间运输材料或产品。
[0064]
图1以简化的方式示出带拖车车辆的线性二自由度的运动学模型,其中,假定牵引车的前轮为转向轮,后轮为驱动轮,并且拖车为单轴拖车。牵引车与拖车在铰接点o处进行连接,在装配好的状态下,拖车能够相对于牵引车绕铰接点进行转动,通常在该铰接点处能够设置有用于检测拖车与牵引车的拖挂角度的角度传感器。在此,“拖挂角度”是指拖车的车体纵向轴线相对于牵引车的车体纵向轴线的夹角,其在图1中通过θ来表示。拖挂角度在倒车过程中能够用于评价车辆的稳定性和安全性,因为当拖挂角度超过极限拖挂角度时,无论怎样转动方向盘,车辆的倒车行为都会使得拖挂角度越来越大,最终发生折叠干涉的危险情况。
[0065]
在线性二自由度模型中,忽略转向系统的影响,直接考虑牵引车前轮转向角,并且忽略悬架的作用,即带拖车车辆(包括牵引车和拖车在内)仅仅在平行于地面的平面中进行运动,也就是说沿车辆坐标系的z轴的位移、绕车辆坐标系的y轴的俯仰角以及绕车辆坐标
系的x轴的侧倾角为零。在自动倒车过程中,由于倒车速度很低,忽略各种加速度、载荷以及轮胎变形滑动的影响。该线性二自由度模型仅仅具有沿车辆坐标系的y轴的侧向运动和绕车辆坐标系的z轴的横摆运动这两个自由度,并且将车速假设为是恒定的。由此,线性二自由度模型还能够被称为自行车模型或两轮摩托车模型。
[0066]
根据本发明的带拖车车辆的运动学模型的运动学关系如下:
[0067][0068]
其中,ψ
t
为拖车的纵向轴线与绝对坐标系的y轴的夹角;
[0069]
ψ
v
为牵引车的纵向轴线与绝对坐标系y轴的夹角;
[0070]
v为牵引车后轮的速度;
[0071]
δ
v
为牵引车前轮转向角;
[0072]
θ为牵引车与拖车的拖挂角度;
[0073]
l
v
为牵引车的驱动轮到转向轮的距离;
[0074]
c
v
为牵引车的驱动轮到铰接点的距离;
[0075]
c
t
为拖车的轮轴中心到铰接点的距离。
[0076]
上述公式涉及倒车入库的情况,当涉及到平行泊车时能够相应地对上述公式进行变形,对此不做更详细的阐述。
[0077]
车辆的倒车过程通常能够包括后退过程或可选地还包括前进过程,由此,在下面还将继续阐述的目标路径包括前进区段和后退区段,例如在平行泊车或倒车入库时是这种情况。图2示出根据本发明的在后退区段中的用于自动倒车的控制方法,其包括有如下步骤:
[0078]
s1:建立带拖车车辆的上面所描述的线性自由度模型;
[0079]
s2:给定拖车与牵引车的设定拖挂角度
[0080]
s3:给定拖车的目标路径;
[0081]
s4:检测拖车与牵引车的当前的实际拖挂角度θ;
[0082]
s5:将所述实际拖挂角度θ与所述设定拖挂角度进行比较,
[0083]
在步骤s5中,如果判定实际拖挂角度θ达到或超过设定拖挂角度则执行步骤s51:借助于拖挂角度控制器基于所述实际拖挂角度θ与所述设定拖挂角度来计算牵引车前轮转向角δ
v
;否则执行步骤s52:借助于转弯半径控制器基于所述实际拖挂角度θ和拖车的目标转弯半径r
t
来计算牵引车前轮转向角δ
v
,基于所述前轮转向角δ
v
来控制牵引车的方向盘转角。通过剥夺转弯半径控制器的控制权,能够防止在倒车过程中实际拖挂角度θ超出一定的范围并且由此避免拖车折叠的发生。
[0084]
通常情况下,汽车的前轮转向角与其方向盘转角存在一定的关系,尤其是比例关系,控制系统能够基于所计算的前轮转向角来获得方向盘转角,对此不再做更详细的阐述。
[0085]
需要说明的是,上文提到的(以及下面还要提到的)s1等步骤名称仅仅用于步骤之
间的区分和便于步骤的引用,并不代表步骤之间的顺序关系,包括附图的流程图也仅仅是执行本方法的示例。在没有明显冲突的情况下,步骤之间可以用各种顺序或者同时执行。
[0086]
设定拖挂角度基于极限拖挂角度θ
max
进行设定。代替通过拖挂角度的增量方程来获取极限拖挂角度θ
max
,根据本发明,该极限拖挂角度θ
max
简化地从带拖车车辆本身的固有参数中得出。当拖挂角度达到极限拖挂角度θ
max
时,方向盘转角并且由此牵引车前轮转向角达到最大,根据运动学方程可知,此时车辆前进和后退都不会导致拖挂角度的变化。因此,该极限拖挂角度θ
max
以如下方式进行计算:
[0087][0088]
其中,r
v
为牵引车后轮最小转弯半径;
[0089]
r
h
为铰接点处的最小转弯半径;
[0090]
δ
vmax
为最大牵引车前轮转向角。
[0091]
在图3中所示出的控制方法与在图2中示出的控制方法的区别在于,剥夺转弯半径控制器的控制权所依据的条件不同。根据图3,在设定拖挂角度小于极限拖挂角度θ
max
的前提下,如果在步骤s5中判定出实际拖挂角度θ达到或超过设定拖挂角度则执行步骤s6:借助于转弯半径控制器对拖车与牵引车的拖挂角度进行预测。根据预测结果,如果拖挂角度具有增加的趋势,则由拖挂角度控制器来计算牵引车前轮转向角δ
v
(步骤s51);如果拖挂角度具有降低的趋势,则重新由转弯半径控制器来计算牵引车前轮转向角δ
v
(步骤s52)。也就是说,仅仅在实际拖挂角度θ大于等于设定拖挂角度并且具有增加的趋势时,才由拖挂角度控制器进行控制。通过进一步限制拖挂角度控制器的控制权,在保证倒车安全的情况下能够更好地实现拖车的轨迹跟踪。
[0092]
该预测过程能够通过如下方式来实现,即借助于转弯半径控制器计算牵引车后退一定的距离(例如10厘米)之后的拖挂角度。
[0093]
应该说明的是,“目标转弯半径”是指下一时刻拖车的轮轴中点(即在运动学模型中还能够理解为拖车车轮的中点)的转弯半径,其也能够被称为期望转弯半径。
[0094]
可选地,在目标路径的后退区段中的目标转弯半径r
t
的确定能够基于预瞄跟踪方法来进行,如图4中所示出的那样:
[0095][0096]
其中,s为偏移距离,所述偏移距离为拖车的轮轴中点与预瞄点之间的距离在垂直于所述纵向轴线的横向轴线上的分量;
[0097]
d为预瞄距离,所述预瞄距离为拖车的轮轴中点与预瞄点之间的距离在拖车纵向轴线上的分量。
[0098]
由此,在步骤s52中,转弯半径控制器基于该目标转弯半径r
t
和实际拖挂角度θ来计算牵引车前轮转向角δ
v
,具体如下:
[0099][0100]
而在步骤s51中,拖挂角度控制器基于实际拖挂角度θ与设定拖挂角度来计算牵引车前轮转向角δ
v
,具体如下:
[0101][0102]
其中,k为常数,是一种比例系数,表示牵引车与拖车的拖挂角度的响应速度。
[0103]
图5示出在前进区段中的自动倒车的控制方法,在前进区段中所述控制方法执行步骤s7,即借助于拖挂角度控制器基于实际拖挂角度θ与目标拖挂角度θ
t
来计算牵引车前轮转向角δ
v
。在此,目标拖挂角度θ
t
是指下一时刻拖车轮轴中点的拖挂角度,其也能够被称为期望拖挂角度。在前进区段中仅使用拖挂角度控制器进行控制,主要是因为,转弯半径控制器在拖车开始转弯时是不适用的。例如,在拖车开始左转时,由于其绕竖直轴线z轴的横摆运动趋势的存在,转弯半径控制器会得出牵引车向右进行转弯,这与实际情况相矛盾,其中,在前进过程中拖车跟随牵引车并且与牵引车的转向保持一致(与后退区段不同,在后退区段中牵引车的转向方向与拖车相反)。
[0104]
同样,基于拖车的预瞄跟踪来计算在目标路径的后退区段中的目标拖挂角度θ
t
:
[0105][0106]
由此,拖挂角度控制器在步骤s7中基于该目标拖挂角度θ
t
和实际拖挂角度θ来计算牵引车前轮转向角:
[0107][0108]
这里应该注意的是,当计算出的目标拖挂角度θ
t
大于前面提到的设定拖挂角度时,令目标拖挂角度θ
t
等于设定拖挂角度
[0109]
可选地,根据本发明的控制方法还能够包括对目标路径的终点检测。在目标路径包括前进区段和后退区段时,所述终点检测涉及前进区段与后退区段的交点(还能够被称为第一终点或折返点)以及所设定的拖车轮轴中点的最终位置(还能够被称为第二终点)。然而,在仅包括后退区段的目标路径的情况下,终点检测能够仅涉及第二终点。
[0110]
图6示出在倒车入库情况下的目标路径,其中,该目标路径有多条直线区段和弧形区段组成,第一终点以p1表示并且第二终点以p2表示。可选地,采用圆形区域进行终点检测,如图6示出的那样,第一终点或第二终点位于所述圆形区域的圆周上并且目标路径穿过圆形区域的中心。在拖车轮轴中点进入该圆形区域内之后,当所述拖车轮轴中点离开圆形区域时发出改变行驶方向或停车的警告。该圆形区域的半径能够根据所需的控制精度来自主地进行设定,例如处于0.5m至1m的范围内,尤其刚好为0.5m。
[0111]
可选地,当拖车轮轴中点进入到该圆形区域中时发出高信号,在其它区域中发出低信号。当拖车轮轴中心离开圆形区域时,也就是说在从高信号转换为低信号的下降沿触
发时,发出改变行驶方向或停止的警告。相比于对点的检测,通过设定较大的用于检测的圆形区域,即使在拖车轨迹跟踪方面出现误差时也能够实现对终点的较精确的检测。
[0112]
此外,本发明还包括一种控制系统100,所述控制系统设置成用于执行根据前述的任意一项或多项实施方式的控制方法。如图7所示出的那样,该控制系统100具有彼此通信连接的检测模块1用于检测拖车与牵引车的实际拖挂角度、比较模块2用于将所检测的拖挂角度与设定拖挂角度进行比较、拖挂角度控制器3和转弯半径控制器4。拖挂角度控制器3基于实际拖挂角度与设定拖挂角度来计算牵引车前轮转向角,而转弯半径控制器4基于实际拖挂角度和拖车的目标转弯半径来计算牵引车前轮转向角。所述控制系统可以集成在车辆的ecu中。
[0113]
应当理解的是,所有以上的实施例都是示例性的而非限制性的,本领域技术人员在本发明的构思下对以上描述的具体实施例做出的各种改型或变形都应在本发明的法律保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1