智能弯道靠边行驶控制方法、系统、车辆及存储介质与流程
1.本发明涉及自动驾驶控制技术领域,具体涉及一种智能弯道靠边行驶控制方法、系统、车辆及存储介质。
背景技术:
2.目前智能驾驶技术正广泛运用于汽车行业,越来越多的汽车搭载着各种智能驾驶系统,人们正开始渐渐尝试无人驾驶这项新兴技术。如今自动驾驶在全球范围已经进入了快速发展期,目前l2级自动驾驶功能已经能实现车道偏离预警、车道对中和车道保持等功能,能够在横向和纵向上同时对车辆进行有效控制。
3.但是,如我们所见大多数交通事故都是发生在弯道处,而过弯时占道行驶又是事故发生的主要原因之一。智能驾驶的最终目的是要让智能驾驶系统彻底取代驾驶员,能够解放驾驶员实现全自动驾驶,这也使得我们必须不断改进不断完善无人驾驶技术。
4.因此,有必要开发一种智能弯道靠边行驶控制方法、系统、车辆及存储介质。
技术实现要素:
5.本发明的目的是提供一种智能弯道靠边行驶控制方法、系统、车辆及存储介质,在现有无人驾驶技术的基础上,能增强自动驾驶的安全性和可靠性。
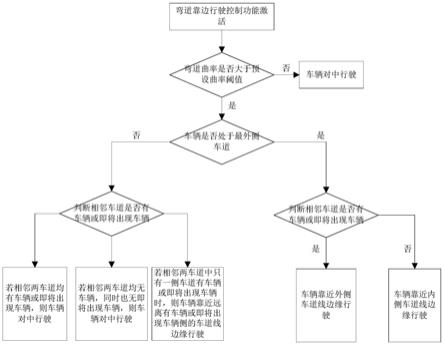
6.本发明所述的一种智能弯道靠边行驶控制方法,包括以下步骤:步骤1、当车辆的弯道靠边行驶控制功能处于激活状态时,实时获取前方道路信息和弯道信息,计算并输出弯道的曲率;步骤2、判断弯道的曲率是否大于设定曲率阈值,若否,则进入步骤3;若是,则进入步骤4;步骤3、车辆对中行驶;步骤4、车辆进入靠边行驶控制策略,具体如下:判断车辆是否处于最外侧车道;若车辆处于最外侧车道,则判断相邻车道是否有车辆或即将出现车辆,若是,则车辆靠近外侧车道线边缘行驶;若否,则车辆靠近内侧车道线边缘行驶;若车辆处于非最外侧车道,则判断相邻车道是否有车辆或即将出现车辆,若相邻两车道均有车辆或即将出现车辆,则车辆对中行驶;若相邻两车道均无车辆且同时也无即将出现车辆,则车辆对中行驶;若相邻两车道中只有一侧车道有车辆或即将出现车辆时,则车辆靠近远离有车辆或即将出现车辆侧的车道线边缘行驶。
7.可选地,所述步骤1中,判断车辆的自适应巡航功能和高精度地图定位功能是否均被开启;若是,则激活弯道靠边行驶控制功能,否则,不激活弯道靠边行驶控制功能。
8.可选地,所述步骤1中,在弯道靠边行驶控制功能被激活后,在仪表上显示该弯道靠边行驶控制功能被激活。
9.第二方面,本发明所述的一种智能弯道靠边行驶控制系统,包括高精地图模块、摄像头模块、雷达模块、自动驾驶控制器总成模块、网关模块以及仪表显示模块;所述高精地图模块用于实现车辆位置自定位,以及提供高精度地图用以特征匹配定位;所述雷达模块用于对车辆前进道路的前方及周围进行检测;所述摄像头模块用于对车辆前方道路的图像进行收集;所述仪表显示模块用于显示系统的当前状态;所述网关模块用于整车相关信息收集、处理及传输交互,该网关模块分别与高精地图模块、摄像头模块、雷达模块、自动驾驶控制器总成模块和仪表显示模块连接;所述自动驾驶控制器总成模块被配置为能执行如本发明所述的智能弯道靠边行驶控制方法的步骤。
10.第三方面,本发明所述的一种车辆,采用如本发明所述的智能弯道靠边行驶控制系统。
11.第四方面,本发明所述的一种存储介质,包括存储器和控制器,所述存储器内存储有计算机可读程序,所述计算机可读程序被控制器调用时能执行如本发明所述的智能弯道靠边行驶控制方法的步骤。
12.本发明具有以下优点:在目前l2自动驾驶的基础上,加上高精度地图定位功能,让车辆在行驶过程中提前预知前方的弯道及其曲率,当曲率大于预设曲率阈值的时候,车辆在过弯时,系统会主动介入使过弯车辆“靠边”过弯,弯道结束时又自动对中车道,在车道中间继续行驶。本发明在现有无人驾驶技术的基础上,大大增强了自动驾驶的安全性和可靠性。
附图说明
13.图1为本实施例的流程图;图2为本实施例中激活弯道靠边行驶控制功能的流程图;图3为本实施例的原理框图;图4为采用本方法和未采用本发明的对比示意图;图中:1、自动驾驶控制器总成模块,2、雷达模块,3、网关模块,4、高精地图模块,5、摄像头模块,6、仪表显示模块。
具体实施方式
14.下面结合附图对本发明作进一步说明。
15.如图1所示,本实施例中,一种智能弯道靠边行驶控制方法,包括以下步骤:步骤1、当车辆的弯道靠边行驶控制功能处于激活状态时,实时获取前方道路信息和弯道信息,计算并输出弯道的曲率。
16.步骤2、判断弯道的曲率是否大于设定曲率阈值,若否,则进入步骤3;若是,则进入步骤4。
17.步骤3、车辆对中行驶。
18.步骤4、车辆进入靠边行驶控制策略,具体如下;
判断车辆是否处于最外侧车道;若车辆处于最外侧车道,则判断相邻车道是否有车辆或即将出现车辆,若是,则车辆靠近外侧车道线边缘行驶;若否,则车辆靠近内侧车道线边缘行驶;若车辆处于非最外侧车道,则判断相邻车道是否有车辆或即将出现车辆,若相邻两车道均有车辆或即将出现车辆,则车辆对中行驶;若相邻两车道均无车辆且同时也无即将出现车辆,则车辆对中行驶;若相邻两车道中只有一侧车道有车辆或即将出现车辆时,则车辆靠近远离有车辆或即将出现车辆侧的车道线边缘行驶。
19.以下以车道为三车道为例对步骤4进行说明:(1)假设车辆处于最左边的车道,若中间车道无车辆,同时也无即将出现车辆,则车辆靠近本车道的右侧车道线的边缘行驶。
20.(2)假设车辆处于最左边的车道,若中间车道有车辆或即将出现车辆,则车辆靠近本车道的左侧车道线的边缘行驶。
21.(3)假设车辆处于最右边的车道,若中间车道无车辆,同时也无即将出现车辆,则车辆靠近本车道的左侧车道线的边缘行驶。
22.(4)假设车辆处于最右边的车道,若中间车道有车辆或即将出现车辆,则车辆靠近本车道的右侧车道线的边缘行驶。
23.(5)假设车辆处于中间的车道,若左边车道无车辆同时也无即将出现车辆,此时,右边车道无车辆同时也无即将出现车辆,则车辆对中行驶。
24.(6)假设车辆处于中间的车道,若左边车道有车辆或即将出现车辆,同时右边车道有车辆或即将出现车辆,则车辆对中行驶。
25.(7)假设车辆处于中间的车道,若左边车道有车辆或即将出现车辆,此时,右边车道无车辆同时也无即将出现车辆,则车辆靠近本车道的右边车道线的边缘行驶。
26.(8)假设车辆处于中间的车道,若右边车道有车辆或即将出现车辆,此时,左边车道无车辆同时也无即将出现车辆,则车辆靠近本车道的左边车道线的边缘行驶。
27.当车辆处于靠边行驶状态时,若检测到弯道曲率小于预设曲率阈值后,系统将车辆拉回车道线中间,继续前行。
28.以两个车道为例,图4中的状态(1)和状态(2)表示的是在直行道路和弯道上,在l2级自动驾驶技术的车道对中,车道保持等功能共同作用下车辆行驶在道路中间的情形。图4中的状态(3)表示的是在本方法的作用下车辆在弯道时自动“靠边”行驶的情形。
29.如图2所示,本实施例中,所述步骤1中,判断车辆的自适应巡航功能和高精度地图定位功能是否均被开启;若是,则激活弯道靠边行驶控制功能,否则,不激活弯道靠边行驶控制功能。
30.本实施例中,所述步骤1中,在弯道靠边行驶控制功能被激活后,在仪表上显示该弯道靠边行驶控制功能被激活,比如:在仪表上显示绿色图标表示已激活。
31.本实施例中,一种智能弯道靠边行驶控制系统,包括高精地图模块4、摄像头模块5、雷达模块2、自动驾驶控制器总成模块1、网关模块3以及仪表显示模块6;该网关模块3分别与高精地图模块4、摄像头模块5、雷达模块2、自动驾驶控制器总成模块1和仪表显示模块6连接,实现各模块之间的数据交互。
32.本实施例中,所述高精地图模块4用于实现车辆位置自定位,以及提供高精度地图用以特征匹配定位。所述雷达模块2用于对车辆前进道路的前方及周围进行检测;并将收集
信息传输给自动驾驶控制器总成模块1,以辅助完成自动驾驶技术。所述摄像头模块5用于对车辆前方道路的图像进行收集,并将收集信息传输给自动驾驶控制器总成模块1,以辅助完成自动驾驶技术。所述仪表显示模块6显示相关状态图标来提示驾驶员当前系统处于什么模式。所述网关模块3用于整车相关信息收集、处理及传输交互。所述自动驾驶控制器总成模块1被配置为能执行如本实施例中所述的智能弯道靠边行驶控制方法的步骤。
33.本实施例中,一种车辆,采用如本实施例中所述的智能弯道靠边行驶控制系统。
34.本实施例中,一种存储介质,包括存储器和控制器,所述存储器内存储有计算机可读程序,所述计算机可读程序被控制器调用时能执行如本实施例中所述的智能弯道靠边行驶控制方法的步骤。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1