一种电动车线性起步控制器的制作方法
1.本实用新型涉及电机驱动电路技术领域,具体涉及一种电动车线性起步控制器。
背景技术:
2.随着技术的发展,电动机已经成为社会上必不可少的动力设备。为了驱动电动机,电动机驱动芯片包括霍尔传感器。霍尔传感器根据电动机的工作状态向控制电路输出定时信号。控制电路根据定时信号和脉宽调制信号控制全桥电路中每个开关的导通状态,使电动机转子的永磁体和线圈相互吸引或排斥。从而,电动机可以进行动力输出。然而,在电动机转子切换阶段期间产生噪声,诸如从n极切换到s极。噪声影响输入到电动机的参数,这使电动机的转速不稳定。
技术实现要素:
3.本实用新型提供一种电动车线性起步控制器,可以在电动机开始工作之前将相关参数电压存储到寄存器中,因此电动机在旋转时不会漂移,从而使电动机保证了稳定的旋转速度。
4.为了达到上述目的,本实用新型提供如下技术方案:一种电动车线性起步控制器,包括:电阻模块,被配置为可操作地接收输入电压并生成至少一个参数电压,其中,所述参数电压被配置为可操作地确定电动机的电动机速度曲线;多路复用器,所述多路复用器耦合到所述电阻模块,并被配置为可操作地接收参数电压;数据控制单元,所述数据控制单元耦接至多路复用器,用以控制多路复用器输出参数电压;模数转换器,所述模数转换器耦接至所述多路复用器与所述数据控制单元,用以操作地接收参数电压并将参数电压转换为数字形式,然后输出数字参数电压至数据控制单元;寄存器,所述寄存器耦接至数据控制单元,用于可操作地存储数据控制单元输出的数字参数电压。
5.优选的,所述数据控制单元向所述多路复用器输出选择信号,以控制所述多路复用器将参数电压输出至所述模数转换器。
6.优选的,所述数据控制单元接收数字参数电压,并将第一重置信号输出到所述模数转换器以重置所述模数转换器。
7.优选的,所述控制器响应于存储在所述寄存器中的数字参数电压确定电动机速度曲线,并基于电动机速度曲线控制全桥电路。
8.优选的,所述全桥电路包括第一开关,第二开关,第三开关和第四开关,第一开关和第二开关耦合到输入电源,第三开关和第四开关耦合到地;第一开关,第二开关,第三开关和第四开关的栅极分别耦接控制器,其中第一开关,第二开关,第三开关和第四开关的导通状态与工作状态相关联电机。
9.优选的,当输入电压停止向电动机驱动电路提供输入电压时,所述数据控制单元将第二重置信号输出到寄存器以重置寄存器。
10.本实用新型有益效果为:可以在电动机开始工作之前将相关参数电压存储到寄存
器中。在输入电源停止提供输入电压之前,由于寄存器中存储的信息没有更改,因此电动机的控制器将响应电动机的速度曲线来驱动电动机,而不受曲线的影响。因此,由于电动机在旋转时不会漂移,因此电动机提供了稳定的旋转速度。
附图说明
11.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
12.图1是电动机的结构图;
13.图2是电动机驱动电路的结构图;
14.图3是电动机速度曲线的示意图;
15.图4是电动机驱动电路的操作波形。
具体实施方式
16.下面将结合本实用新型的附图,对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
17.实施例一:
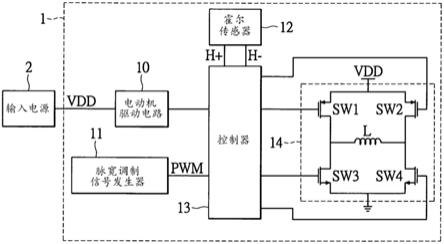
18.根据图1、图2、图3、图4所示,一种电动车线性起步控制器,其中的电动机1包括电动机驱动电路10,脉宽调制信号发生器11,霍尔传感器12,控制器13和全桥电路14。电动机驱动电路10耦合到输入电源2和控制器13。脉冲宽度调制信号发生器11耦合到控制器13。控制器13耦合到霍尔传感器12全桥电路14。输入电源2被配置为可操作地提供输入电压vdd以驱动电动机1。
19.电动机驱动电路10包括合适的逻辑,电路,接口和/或代码,可用于接收输入电压vdd并确定电动机速度曲线。基于输入脉冲宽度调制信号的占空比与其对应速度之间的关系而绘制的曲线被认为是电动机速度曲线。例如,电动机速度曲线的纵轴表示电动机速度,电动机速度曲线的横轴表示输入脉冲宽度调制信号的占空比。
20.当输入电源2开始向电动机1提供输入电压vdd时,电动机驱动电路10响应于输入电压vdd而产生至少一个参数电压。参数电压用于确定电动机速度曲线。电动机驱动电路10将参数电压存储到寄存器中,然后电动机1开始工作。
21.脉宽调制信号发生器11包括合适的逻辑,电路,接口和/或代码,可操作以提供脉宽调制信号pwm以驱动电动机1。脉宽调制信号pwm的占空比可以根据系统要求进行调整。
22.霍尔传感器12包括合适的逻辑,电路,接口和/或代码,可用于感测电动机转子中磁极的磁极位置电机1,并以生成第一定时信号h+和一个第二定时信号h
‑
。顺便提及,本领域技术人员应该能够知道使用霍尔传感器12感测电动机转子中的磁极位置并生成定时信号,因此在此省略进一步的描述。
23.控制器13包括合适的逻辑,电路,接口和/或代码,可操作为接收脉冲宽度调制信
号pwm,第一定时信号h+和第二定时信号h
‑
,并控制全桥电路的导通状态,基于脉冲宽度调制信号pwm,第一定时信号h+,第二定时信号h
‑
以及由电动机驱动电路10提供的电动机速度曲线的占空比,来驱动电动机1。
24.全桥电路14级包括第一开关sw 1,第二开关sw 2,第三开关sw 3,第四开关sw 4和电动机负载l.第一开关sw 1和第二开关sw 2是耦合至输入电源2以接收输入电压vdd。第三开关sw 3和第四开关sw 4接地。电动机负载l的第一端连接到第一开关sw 1和第三开关sw 3。电动机负载l的第二端连接到第二开关sw 2和第四开关sw 4。第一开关sw的栅极1,第二开关sw 2,第三开关sw 3和第四开关sw 4分别连接到控制器13。此外,电动机负载l的两端还连接到电动机转子。
25.在本实施例中,第一开关sw 1和第二开关sw 2是p沟道mosfet,所述第三开关sw 3和第四开关sw 4是n沟道mosfet。第一开关sw 1和第二开关sw 2的源极分别连接到输入电源2,并且第一开关sw 1和第二开关sw 2的漏极分别连接到电动机负载的两端。l.第三开关sw 3和第四开关sw 4的漏极它们分别连接到电动机负载l的两端,并且第三开关sw 3和第四开关sw 4的源极分别接地。
26.通过控制第一开关sw的导通状态1,第二开关sw 2,第三开关sw 3和第四开关sw 4,控制单元13可以适当地增加或减少提供到电机转子上的电压和进一步控制电动机转子的速度。
27.在输入电源2提供输入电压vdd的同时,将根据存储在电动机驱动电路10中的电动机速度曲线来操作电动机1。存储在电动机驱动电路10中的电动机速度曲线不受电动机旋转期间产生的噪声的影响。因此,只要电动机1根据存储在电动机驱动电路10中的电动机速度曲线工作,电动机1就可以提供稳定的转速。
28.其具体工作原理如下:电动机驱动电路10包括电阻模块101,多路复用器102,数据控制单元103,模数转换器104和寄存器105。电阻模块101耦合到输入电源2。多路复用器102耦合到电阻模块101。数据控制单元103耦合到多路复用器102。模数转换器104耦合到多路复用器102和数据控制单元103。寄存器105耦合到数据控制单元103。
29.电阻模块101包括合适的逻辑,电路,接口和/或代码,可操作以接收由输入电源2提供的输入电压vdd,并产生至少一个参数电压pv。参数电压pv与电动机1的电动机速度曲线相关。
30.电阻模块101由多个电阻器组成并形成电阻器网络。通过设计电阻模块101的每个电阻器的电阻值,电阻模块101可以控制参数电压pv的电压值,并进一步生成相应的电动机速度曲线。
31.为了进一步说明本发明,图3表示输入到控制器13的脉宽调制信号pwm的占空比,并且纵轴代表电动机速度。
32.参数电压pv包括速度电压min或脉冲宽度电压sp。速度电压min与电动机速度曲线中的电动机1的初始速度有关。脉冲宽度电压sp与电动机速度曲线中的第一脉冲宽度调制信号pwm的初始占空比有关。换句话说,电动机速度曲线的形状随着速度电压min和脉冲宽度电压sp的电压而变化。如果速度电压min或脉冲宽度电压sp都不等于0,则电动机速度曲线的形状类似于图3。
33.参数电压pv与电动机速度曲线的斜率相关,这意味着电动机速度曲线的斜率受参
数电压pv影响。简而言之,电动机速度曲线的形状随参数电压pv的电压值而变化。本公开不限制参数电压pc的类型和数量。本领域技术人员可以根据需要设计电阻模块101,以使电阻模块101产生参数电压pv并改变电机速度曲线的形状。
34.电阻模块101的电阻器可以在生产过程中预先设计。此外,这些电阻器可以是可变电阻器,使得电阻模块101可以基于产生不同的参数电压pv的需要来调节这些电阻器的电阻。此外,由于电阻器的低成本,本领域技术人员可以通过用不同电阻替换电阻器来调节参数电压pv。
35.多路复用器102包括合适的逻辑,电路,接口和/或代码,其可操作以接收参数电压pv,并且选择性地将参数电压pv输出至模数转换器104。
36.数据控制单元103包括合适的逻辑,电路,接口和/或代码,可操作来控制多路复用器102以将参数电压pv输出到模数转换器104。
37.模数转换器104包括合适的逻辑,电路,接口和/或代码,用于接收参数电压pv并将参数电压pv转换为数字形式。然后,模数转换器104将数字参数电压pv'发送到数据控制单元103。
38.寄存器105包括合适的逻辑,电路,接口和/或代码,可用于存储数字参数电压pv'。
39.结合波形进一步说明电动机驱动电路,输入电源2提供输入电压vdd以使电动机1工作。
40.首先,电动机驱动电路10的电阻模块101接收输入电压vdd,并将参数电压pv输出至多路复用器102。本公开的一个实施例通过但不限于电阻模块101通过不同的引脚输出速度电压min和脉冲宽度电压sp作为参数电压pv来示例。
41.接下来,数据控制单元103将与速度电压min对应的选择信号sel输出到多路复用器102,从而多路复用器102将速度电压min输出到模数转换器104。模数转换器104将速度电压mn转换成数字形式,然后将数字速度电压min'发送到数据控制单元103。
42.数据控制单元103在接收到数字速度电压min'之后,将数字速度电压min'输出到寄存器105,并且寄存器105存储数字速度电压min'。另一方面,数据控制单元103在接收到数字速度电压min'之后,将第一重置信号adc_rst输出到模数转换器104以重置存储在模数转换器104中的信息。
43.接下来,数据控制单元103将与脉冲宽度电压sp对应的选择信号sel输出到多路复用器102,使得多路复用器102将脉冲宽度电压sp输出到模数转换器104。模数转换器104将脉冲宽度电压sp转换为数字形式,然后将数字脉冲宽度电压sp'发送至数据控制单元103。
44.类似地,数据控制单元103在接收到数字脉冲宽度电压sp'之后,将数字脉冲宽度电压sp'输出到寄存器105,并且寄存器105存储数字脉冲宽度电压sp'。另一方面,数据控制单元103在接收到数字脉冲宽度电压sp'之后,将第一重置信号adc_rst输出到模数转换器104以重置存储在模数转换器104中的信息。
45.当寄存器105存储所有数字参数电压pv'时,数据控制单元103向控制器输出开关信号rdy使控制器13进入操作模式。
46.当控制器13进入操作模式时,控制器13响应于存储在寄存器中的数字参数电压确定电动机速度曲线,并基于电动机速度曲线控制全桥电路14的导通状态,脉冲宽度调制信号pwm,第一定时信号h+和第二定时信号h
‑
驱动电动机1。
47.当输入电源2停止提供输入电压vdd时,意味着电动机1的工作已经完成,数据控制单元103将第二重置信号r_rst输出到寄存器105,以重置存储在寄存器105中的信息。当输入电源2再次将输入电压vdd提供给电动机驱动电路10时,电动机驱动电路10重复上述步骤,使得寄存器105存储电压pv'的所有数字参数。然后,电动机1基于电动机速度曲线工作。
48.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应所述以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1