一种支持独立驱动/转向控制的四合一控制装置的制作方法
1.本实用新型涉及汽车驱动/转向领域,尤其涉及一种支持独立驱动/转向控制的四合一控制装置。
背景技术:
2.随着电动汽车产业的发展,人们对它的要求也越来越高,主要体现在安全性,可操纵性、舒适性,智能化等方向;四轮独立驱动
‑
独立转向的电动车辆除了具有分布式驱动电动车辆较短的传动链,较高的传动效率,紧凑的结构等优点以外,其车辆的机动性和可操纵性更高,在狭窄的区间内可以实现较小的转弯半径和原地转向,未来与智能化汽车的要求兼容性更强。目前该领域已经开始吸引越来越多人的关注与研究。四轮独立驱动
‑
独立转向电动车辆,是在每一个轮子上集成了轮毂电机和转向电机,以纵向为0度可以实现左右各旋转90 度的转角,从而可以实现前轮转向,后轮转向,四轮异向转向,楔向转向,横行以及原地转向等模式。由于单个独立驱动/转向模块需要一个轮毂电机控制单元,一个直流转向的伺服电机控制单元,每个车需要配备4个轮毂电机控制单元和4和转向的直流伺服电机控制单元,共计8个电机控制器,各个控制器之间通过can通信的方式统一通过整车控制器vcu进行调度控制。8个控制器不仅增车身的重量,同时占据了较多的布置空间,这样就给其它部件的布置带来了一定的困难,同时,较复杂的can网络也使的整车控制以及数据监控较为繁琐。
技术实现要素:
3.针对上述所显示出来的问题,本实用新型提供了一种支持独立驱动/转向控制的四合一控制装置用以解决背景技术中提到的8个电机控制器,各个控制器之间通过can通信的方式统一通过整车控制器 vcu进行调度控制。8个控制器不仅增车身的重量,同时占据了较多的布置空间,这样就给其它部件的布置带来了一定的困难,同时,较复杂的can网络也使的整车控制以及数据监控较为繁琐的问题。
4.一种支持独立驱动/转向控制的四合一控制装置,该装置包括:
5.电容,输入端与直流母线接口连接,输出端分别与变压器的输入端和驱动电机控制单元连接,所述驱动电机控制单元输出端与第一三相输出接口和第二三相输出接口连接,用于驱动两台轮毂电机,所述变压器的输出端与转向电机控制单元输入端连接,用于提供安全稳定的电压,所述转向电机控制单元的输出端分别与第一直流/交流输出接口和第二直流/交流输出接口连接,用于控制转向电机。
6.优选的,所述直流母线接口与汽车内安装的高压蓄电池连接,用于从所述蓄电池上获取电能给所述四合一控制装置提供第一预设电压的高压直流电,低压接口与汽车内安装的低压铅酸电池连接,用于为驱动电机控制单元以及转向电机控制单元低压供电,所述第一三相输出接口和第二三相输出接口与驱动单元连接,所述第一直流/交流输出接口和所述第二直流/交流输出接口与所述转向单元连接。
7.优选的,所述驱动电机控制单元通过矢量控制的方式对轮毂电机进行控制,以控制轮毂电机的的转速或扭矩。
8.优选的,所述四合一控制装置通过所述第一直流/交流输出接口和第二直流/交流输出接口对驱动/转向一体单元的转向进行控制,又通过所述第一三相输出接口和第二三相输出接口对驱动/转向一体单元的驱动进行控制。
9.优选的,所述四合一控制装置还设置有u型管道,管道内布置散热片,所述u型管道连接有水冷装置,所述水冷装置包括:
10.第一温度传感器,设置于所述u型管道上,用于检测u型管道的第一当前温度;
11.第一处理器,一端与所述第一温度传感器连接,另一端与水泵连接,用于将所述第一当前温度与预设温度进行比较,当所述第一当前温度大于预设温度时,向所述水泵发出控制指令;
12.所述水泵,设置于水箱中,另一端与所述u型管道一端连接,用于将水箱中的冷却液循环导入所述u型管道中;
13.所述水箱,设置于汽车内部,所述水箱与所述u型管道密封连接。
14.优选的,所述四合一控制装置还设置有风冷管道,所述风冷管道连接有风冷装置,所述风冷装置,包括:
15.第二温度传感器,设置于所述四合一控制装置内,用于检测所述四合一控制装置内部的第二当前温度;
16.第二处理器,一端与所述第二温度传感器连接,另一端与制冷装置连接,用于将所述第二当前温度与预设温度进行比较,当所述第二当前温度大于预设温度时,向所述制冷装置发出制冷指令;
17.所述制冷装置,另一端与所述风冷管道连接,用于根据所述制冷指令将所述制冷装置中的冷风输送到所述风冷管道中。
18.优选的,所述直流母线接口的输入电压为60v
‑
540v,输入电压经过电容后分别连接到两组逆变器,最终输出两组三相交流电,用于驱动两台轮毂电机。
19.优选的,所述轮毂电机和所述转向电机都位于驱动/转向一体单元内。
20.优选的,所述直流母线接口的输入电压经过电容后与所述变压器相连,输出24v
‑
72v的低压电压,用于控制所述转向电机控制单元电压输入。
21.优选的,所述四合一控制装置还设置有助力减速控制单元,所述助力减速控制单元包括:
22.采集装置,与第三处理器和车载传感器连接,用于采集汽车的车速、转向电机转速、系统状态、转向电机控制量;
23.所述第三处理器,另一端与控制器连接,用于根据所述采集装置的采集结果,计算汽车转向的阻尼补偿量、摩擦补偿量和惯性补偿量,根据汽车转向的阻尼补偿量、摩擦补偿量和惯性补偿量计算出汽车转向的助力参数;
24.所述控制器,与转向电机控制单元连接,根据所述第三处理器计算出来的助力参数和汽车方向盘发出的控制信号对转向电机的扭矩进行补偿。
附图说明
25.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
26.在附图中,部件和标号的对应关系如下:
27.1电容、2直流母线输入接口、3变压器、4驱动电机控制单元、 4.1逆变器、5第一三相输出接口、6第二三相输出接口、7低压接口、 9第一直流/交流输出接口、10第二直流/交流输出接口、11水冷装置、 11.1第一温度传感器、11.2第一处理器、11.3水泵、11.4水箱、12 风冷装置、12.1第二温度传感器、12.2第二处理器、12.3制冷装置、 13助力减速单元、13.1采集装置、13.2第三处理器、13.3控制器;
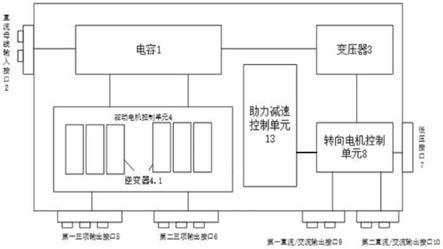
28.图1为本实用新型所提供的一种支持独立驱动/转向控制的四合一控制装置的结构示意图;
29.图2为本实用新型所提供的水冷装置的结构示意图;
30.图3为本实用新型所提供的风冷装置的结构示意图;
31.图4为本实用新型所提供的助力减速单元的结构示意图;
32.图5为本实用新型所提供的四合一控制器基本组成图;
33.图6为本实用新型所提供的集成式智能转向模块控制的结构示意图。
具体实施方式
34.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本公开相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本公开的一些方面相一致的装置和方法的例子。
35.本实用新型提供一种技术方案:如图1所示,该装置包括:
36.电容1,输入端与直流母线接口2连接,输出端分别与变压器3 的输入端和驱动电机控制单元4连接,所述驱动电机控制单元4输出端与第一三相输出接口5和第二三相输出接口6连接,用于驱动两台轮毂电机,所述变压器3的输出端与转向电机控制单元8输入端连接,用于提供安全稳定的电压,所述转向电机控制单元8的输出端分别与第一直流/交流输出接口9和第二直流/交流输出接口10连接,用于控制转向电机。
37.所述直流母线接口2与汽车内安装的高压蓄电池连接,用于从所述高压蓄电池上获取电能给所述四合一控制装置提供第一预设电压的高压直流电,所述低压接口7与汽车内安装的低压铅酸电池连接,用于为驱动电机控制单元4以及转向电机控制单元8低压供电,所述第一三相输出接口5和第二三相输出接口6与驱动单元连接,所述第一直流/交流输出接口9和所述第二直流/交流输出接口10与所述转向单元连接。
38.其中,汽车内安装的低压铅酸电池为12v铅酸电池。直流母线接口2输入是直流电压,第一预设电压为60v~540v。
39.上述技术方案的有益效果为:四合一控制器可以有效利用控制器内部空间,尽可能的减小总体尺寸和重量,同时多合一控制器内部可以共用can网络,可以有效减少can通道的数量,从而降低can 网络的复杂度,降低汽车电器架构设计工程师以及算法开发人员的工作量。
40.在一个实施例中,所述驱动电机控制单元2通过矢量控制的方式对轮毂电机进行控制,以控制轮毂电机的的转速或扭矩。
41.上述技术方案的有益效果为:相对于传统车辆,矢量控制的轮毂电机将动力、传动和制动装置都整合到轮毂内,可以获得更好的空间利用率,同时传动效率也要高出不少,基于驱动/转向一体化的模块可以实现汽车的前轮转向,四轮异向转向,楔形运行,横行以及360 度的原地转向,因此该种方式可以解决汽车在狭窄空间的转弯问题。
42.在一个实施例中,所述四合一控制装置通过所述第一直流/交流输出接口9和第二直流/交流输出接口10对驱动/转向一体单元的转向进行控制,又通过所述第一三相输出接口5和第二三相输出接口6对驱动/转向一体单元的驱动进行控制。
43.上述技术方案的有益效果为:既可以通过所述第一直流/交流输出接口9和第二直流/交流输出接口10对驱动/转向一体单元的转向进行控制,也可以通过所述第一三相输出接口5和第二三相输出接口6 对驱动/转向一体单元的驱动进行控制,有效的保证了轮毂电机转向的准确和稳定。
44.在一个实施例中,如图2所示,所述四合一控制装置还设置有u 型管道,管道内布置散热片,所述u型管道连接有水冷装置11,所述水冷装置11包括:
45.第一温度传感器11.1,设置于所述u型管道上,用于检测u型管道的第一当前温度;
46.第一处理器11.2,一端与所述第一温度传感器11.1连接,另一端与水泵11.3连接,用于将所述第一当前温度与预设温度进行比较,当所述第一当前温度大于预设温度时,向所述水泵11.3发出控制指令;
47.所述水泵11.3,设置于水箱11.4中,另一端与所述u型管道一端连接,用于将水箱11.4中的冷却液循环导入所述u型管道中;
48.所述水箱11.4,设置于汽车内部,所述水箱11.4与所述u型管道密封连接。
49.上述技术方案的有益效果为:水冷装置通过u型管道,可以实现将四合一控制装置内过高的温度快速导出到装置外部,可以有效的防止四合一控制装置不会由于温度无法及时散出而导致装置过热无法正常工作甚至损坏。管道内布置散热片可增大散热面积,提高散热效率。
50.在一个实施例中,如图3所示,所述四合一控制装置还设置有风冷管道,所述风冷管道连接有风冷装置12,所述风冷装置12,包括:
51.第二温度传感器12.1,设置于所述四合一控制装置内,用于检测所述四合一控制装置的第二当前温度;
52.第二处理器12.2,一端与所述第二温度传感器12.1连接,另一端与制冷装置12.3连接,用于将所述第二当前温度与预设温度进行比较,当所述第二当前温度大于预设温度时,向所述制冷装置12.3 发出制冷指令;
53.所述制冷装置12.3,另一端与所述风冷管道连接,用于根据所述制冷指令生成冷风输送到所述风冷管道中。
54.上述技术方案的有益效果为:水冷装置由于需要对冷却液进行重复的循环利用,当四合一控制装置处于长时间工作过程中时,水箱内冷却液的热量无法及时散出,就会大大影响水冷装置的散热效果,从而导致四合一控制装置内部温度升高,这时制冷装置制造的冷风就可以通过风冷管道将四合一控制装置内过高的温度快速导出到装置外部,可以有
效的防止四合一控制装置不会由于温度无法及时散出而导致装置过热无法正常工作甚至损坏。
55.在一个实施例中,所述直流母线接口2的输入电压为60v
‑
540v,输入电压经过电容1后分别连接到两组逆变器4.1,最终输出两组三相交流电,用于驱动两台轮毂电机。
56.在一个实施例中,所述轮毂电机和所述转向电机都位于驱动/转向一体单元内。
57.在一个实施例中,所述直流母线接口2的输入电压经过电容1后与所述变压器3相连,输出24v
‑
72v的低压电流,用于控制所述转向电机控制单元8电压输入。
58.在一个实施例中,所述装置有三种分布模式,第一种是两台四合一控制装置分别控制前左轮,前右轮的驱动/转向模块和后左轮和后右轮两个驱动/转向模块,第二种是分别控制左前轮,左后轮两个驱动/转向模块和右前轮,右后轮两个驱动/转向模块,第三种是分别控制左前轮,右后轮两个驱动/转向模块和右前轮,左后轮两个驱动/转向模块。
59.上述技术方案的有益效果为:所述装置的三种分布模式,方便了用户对于汽车操控的设计,节省了汽车的内部空间,有利于提高汽车内部空间的利用率。
60.在一个实施例中,如图4所示,所述四合一控制装置还设置有助力减速控制单元13,所述助力减速控制单元13包括:
61.采集装置13.1,与第三处理器13.2和车载传感器连接,用于采集汽车的车速、转向电机转速、系统状态、转向电机控制量;
62.所述第三处理器13.2,另一端与控制器13.3连接,用于根据所述采集装置13.1的采集结果,计算汽车转向的阻尼补偿量、摩擦补偿量和惯性补偿量,根据汽车转向的阻尼补偿量、摩擦补偿量和惯性补偿量计算出汽车转向的助力参数;
63.所述控制器13.3,与转向电机控制单元8连接,用于根据所述第三处理器13.2计算出来的助力参数和汽车方向盘发出的控制信号对转向电机的扭矩进行补偿;
64.其中,控制器根据助力参数,对汽车方向盘发出的控制信号进行修正,调整转向电机的转速,保证汽车转向更轻便灵敏,路感更好,安全性更高,
65.上述技术方案的有益效果为:助力减速控制单元通过对汽车的车速、发动机转速、系统状态、电机控制量的采集计算出汽车转向的助力参数,再根据助力参数,对汽车方向盘发出的控制信号进行修正,调整转向电机的转速,从而保证汽车转向更轻便灵敏,路感更好,安全性更高。
66.在一个实施例中,如图5图6所示,在本方案中,四合一控制单元包含了两个用于驱动轮子的轮毂电机控制单元,两个转向电机控制器单元,单台车仅需要配备两台四合一控制器,控制器布局分为是三种,第一种是两台四合一控制器分别控制前左右轮驱动/转向模块,后左右轮驱动/转向模块,第二种是分别控制左前后两个驱动/转向模块和右前后两个驱动/转向模块,第三种是分别控制左前右后两个驱动/转向模块和右前左后两个驱动/转向模块,四合一控制器母线输入是直流电压,常用电压区间为60v~540v,母线电压经过电容后分别连接到两组逆变器,经过主控板与驱动控制以后最终输出两组三相交流电,用于驱动两台轮毂流电机,它们共用一套主控板;由于直流伺服电机控制器一般为低压系统,电压等级在24v~到72v之间,常用为48v或者60v,因此四合一控制器单元内部配备变压器,用以提供安全稳定的电压。
67.本领域技术人员应当理解的是,本实用新型中的第一、第二指的是不同应用阶段
而已。
68.本领域技术用户员在考虑说明书及实践这里公开的公开后,将容易想到本公开的其它实施方案。本技术旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由下面的权利要求指出。
69.应当理解的是,本公开并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本公开的范围仅由所附的权利要求来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1