一种复合材料制动臂的制作方法
1.本实用新型属于汽车零部件技术领域,具体涉及一种复合材料制动臂。
背景技术:
2.连续纤维增强复合材料,具有较高的比刚度、比强度,可替代金属,实现零部件轻量化;连续纤维增强热塑性复合材料模压与注塑工艺结合,可实现一步成型,具有成型周期短、生产效率高等优势。
3.制动踏板用于控制车速,是汽车重要零部件之一,驾驶员通过操纵制动臂实现车辆速度控制。现有制动臂多为钢制或铝制,需要多种制造工艺及工序,制造精度难以控制。
技术实现要素:
4.本实用新型的目的在于提供一种复合材料制动臂,以解决现有技术中存在的采用金属制作不利于零部件的轻量化设计、制动臂制造工艺及工序较多、制造精度难以控制的问题。
5.本实用新型所采用的技术方案如下:
6.一种复合材料制动臂,所述复合材料制动臂通过中轴衬套41、内套筒42、锁紧螺母43、中轴螺栓44安装于主支架4之上,包括梁体1、筋体2及金属嵌体3;
7.梁体1,材质为复合材料,为制动臂主要承力结构;
8.筋体2,材质为复合材料,连接于所述梁体1上,为制动臂次要承力结构,实现所述复合材料制动臂连接、操作及信号触发等功能;
9.金属嵌体3,嵌于所述筋体2之内。
10.进一步地,所述筋体2由非连续纤维增强复合材料一体注塑成型,包括:
11.第一筋体21,与所述梁体1连接且位于所述梁体1的一端;
12.第二筋体22,呈片状,与所述梁体1连接且贴覆于所述梁体1的内侧;
13.第三筋体23,与所述梁体1连接且绕所述梁体1的梁边11设置;
14.第四筋体24,呈网格状,与所述梁体1连接且位于所述梁体1的内侧;
15.踏板体25,呈片状,通过筋状体251与所述梁体1连接且位于所述梁体1另一端;
16.第五筋体26,与所述梁体1连接且位于所述梁体1的外侧。
17.进一步地,所述第一筋体21上设有环形体211,所述金属嵌体3嵌于所述环形体211之内。
18.进一步地,所述第一筋体21上设有包覆体212,所述包覆体212贴覆于所述梁体1外侧,增强所述第一筋体21与所述梁体1的连接强度。
19.进一步地,所述第二筋体22上设有方形孔221,通过推杆卡扣51将推杆5连接于制动臂之上。
20.进一步地,所述第三筋体23的截面呈“l”型,贴覆于梁体1的梁边11上。
21.进一步地,所述踏板体25上安装有踏板垫6。
22.进一步地,所述第五筋体26上设有圆形孔261,缓冲垫7通过所述圆形孔261安装于所述制动臂之上。
23.进一步地,所述梁体1的材料为连续纤维增强热塑性复合材料,所述筋体2的材料为非连续纤维增强热塑性复合材料,热塑性复合材料的基体为热塑性树脂材料。
24.与现有技术相比,本实用新型的优点如下:
25.本实用新型提出的一种复合材料制动臂,梁体作为复合材料制动的主体,由连续纤维复合材料形成,连续纤维复合材料具有高比模量、高比强度,在提高复合材料制动臂性能的同时,有利于降低制动臂的重量;筋体由非连续纤维复合材料一体注塑制成,且与梁体连接,实现复合材料制动臂连接、操作及信号触发等功能。同时,通过金属嵌体嵌设于筋体之内,从而保证复合材料制动臂使用耐久性。
附图说明
26.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
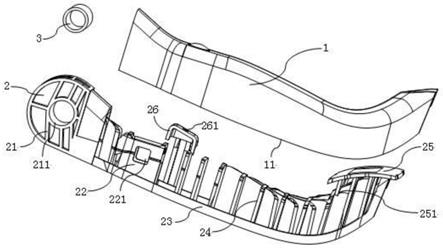
27.图1是本实用新型实施例提供的制动臂的一个视角结构示意图;
28.图2是本实用新型实施例提供的制动臂的分解结构示意图;
29.图3是本实用新型实施例提供的制动臂安装于制动踏板的一个视角结构示意图;
30.图4是本实用新型实施例提供的制动臂安装于制动踏板的另一个视角结构示意图;
31.图5是图4中a-a截面的示意图;
32.图6是图4中b-b截面的示意图;
33.图7是图4中c-c截面的示意图;
34.图8是图4中d-d截面的示意图;
35.图中:
36.1、梁体;11、梁边;
37.2、筋体;21、第一筋体;211、环形体;212、包覆体;22、第二筋体;221、方形孔;23、第三筋体;24、第四筋体;25、踏板体;251、筋状体;26、第五筋体;
38.3、金属嵌体;
39.4、主支架;41、中轴衬套;42、内套筒;43、锁紧螺母;44中轴螺栓;
40.5、推杆;51、推杆卡扣;
41.6、踏板垫。
具体实施方式
42.为清楚、完整地描述本实用新型所述技术方案及其具体工作过程,结合说明书附图,本实用新型的具体实施方式如下:
43.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是
机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
44.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
45.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
46.实施例1
47.为了进一步降低制动臂的重量,同时提制动臂性能、简化工序及工艺,如图1-3所示,本实施例提供了一种复合材料制动臂,包括梁体1、筋体2及金属嵌体3;
48.其中,梁体1的材质为复合材料;筋体2的材质为复合材料并安装于所述梁体1上,金属嵌体3嵌于筋体2之内。梁体1为制动臂主要承力结构,筋体2为制动臂次要承力结构,实现复合材料制动臂连接、操作及信号触发等功能。
49.通过采用复合材料制作梁体1和筋体2,能够降低制动臂重量,有利于零部件的轻量化设计。同时通过设置金属嵌体3,从而保证复合材料制动臂使用耐久性。
50.所述复合材料制动臂通过中轴衬套41、内套筒42、锁紧螺母43、中轴螺栓44安装于主支架4之上,包括梁体1、筋体2及金属嵌体3;
51.具体地,梁体1的材料为连续纤维增强热塑性复合材料。具体地,本实施例中,梁体1的截面呈“u”型以使得梁体1形成u形槽。
52.具体地,本实施例中,筋体2由非连续纤维增强热塑性复合材料一体注塑成型,筋体2包括第一筋体21、第二筋体22、第三筋体23、第四筋体24、踏板体25、第五筋体26。
53.其中,第一筋体21,与梁体1连接且位于梁体1一端;第二筋体22,呈片状,与梁体1连接且贴覆于梁体1内侧;第三筋体23,与梁体1连接且绕梁体1的梁边11设置;第四筋体24,呈网格状,与梁体1连接且位于梁体1的内侧;踏板体25,呈片状,通过筋状体251与梁体1连接且位于梁体1另一端;第五筋体26,与梁体1连接且位于梁体1的外侧。
54.具体地,第一筋体21上设有环形体211,金属嵌体3嵌于环形体211之内。
55.具体地,第一筋体21上设有包覆体212,包覆体(212)贴覆于梁体1外侧,增强第一筋体筋体21与梁体1的连接强度。
56.具体地,第二筋体22上设有方形孔221,通过推杆卡扣51将推杆5连接于制动臂之上。
57.具体地,第三筋体23的截面呈“l”型贴覆于梁体1的梁边11。
58.具体地,踏板垫6安装于所述踏板体25之上。
59.具体地,第五筋体26上设有圆形孔261,缓冲垫7通过圆形孔261安装于所述制动臂之上。
60.其中,热塑性复合材料的基体为热塑性树脂材料,优选地,梁体1和筋体2采用同类热塑性树脂基体。
61.以上结合附图详细描述了本实用新型的优选实施方式,但是,本实用新型并不限于上述实施方式中的具体细节,在本实用新型的技术构思范围内,可以对本实用新型的技术方案进行多种简单变型,这些简单变型均属于本实用新型的保护范围。
62.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本实用新型对各种可能的组合方式不再另行说明。
63.此外,本实用新型的各种不同的实施方式之间也可以进行任意组合,只要其不违背本实用新型的思想,其同样应当视为本实用新型所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1