一种野生动物识别用的多功能无人车
1.本实用新型涉及智能汽车设备相关领域,具体是一种野生动物识别用的多功能无人车。
背景技术:
2.野生动物,是指在大自然的环境下生长且未被驯化的动物;野生动物有广义和狭义之分;野生动物是人类赖以生存的生态系统的重要组成部分;无人车又称全自动驾驶车,是一种通过电脑系统实现无人驾驶的智能汽车;无人汽车依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。
3.现有装置的识别拍摄部件较为固定,难以进行调节,导致识别拍摄的图像角度较为单一,方便调整安装角度,安装角度不能控制,给安装带来一定的麻烦,且容易受树叶、杂草等部件遮挡,从而影响识别拍摄工作;现有装置缺少减震部件,从而容易使拍摄部件等易受损的电气元件受振动导致损坏;现有装置缺少对无人车的防护工作,容易导致无人车前端的部件和玻璃受到刮伤,从而影响内置拍摄时的质量。
技术实现要素:
4.因此,为了解决上述不足,本实用新型在此提供一种野生动物识别用的多功能无人车。
5.本实用新型是这样实现的,构造一种野生动物识别用的多功能无人车,该装置包括无人车、开合门、天窗开口、挡风玻璃、识别机构、防护机构、信号连接器、定位模块、储物腔和蓄能器,所述无人车前后两侧均与开合门铰链连接,所述无人车顶部设有天窗开口,所述无人车前端顶部设有挡风玻璃,所述无人车内下腔底部与信号连接器螺栓连接,所述信号连接器顶部与定位模块螺栓连接,所述无人车内右侧设有储物腔,所述识别机构设于无人车内部,所述识别机构包括限位筒、减震弹簧、移动板、放置槽、安装绞座、第一气动伸缩杆、辅助机构、电动天窗、微型气泵、电磁换向阀、第二气动伸缩杆和plc控制器,所述无人车内上腔底部与限位筒螺栓连接,所述无人车内上腔底部与减震弹簧弹性连接,所述限位筒活塞杆顶部与移动板螺栓连接,所述减震弹簧顶部与移动板弹性连接,所述移动板前后两端均与无人车内壁滑动连接,所述移动板底部左侧设有放置槽,所述移动板顶部左侧与安装绞座螺栓连接,所述安装绞座圆心转轴与第一气动伸缩杆底部连接件固定连接,所述第一气动伸缩杆顶部设有辅助机构,所述第一气动伸缩杆右端与电动天窗相接触,所述天窗开口内槽壁与电动天窗滑动连接,所述移动板顶部右侧与微型气泵螺栓连接,所述微型气泵出气口与电磁换向阀进气口管道连接,所述电磁换向阀左端出气口与第一气动伸缩杆进气口管道连接,所述电磁换向阀右端出气口与第二气动伸缩杆进气口管道连接,所述第二气动伸缩杆活塞杆左端与第一气动伸缩杆右端安装座转动连接,所述第二气动伸缩杆固定杆底部与移动板顶部右侧的安装座转动连接,所述无人车内上腔底部与plc控制器螺栓连
接,所述电动天窗、微型气泵和电磁换向阀均与plc控制器电信号连接,所述电动天窗、微型气泵、电磁换向阀和plc控制器均与蓄能器电连接,所述防护机构设于无人车左端。
6.优选的,所述辅助机构包括安装板、第三气动伸缩杆、工形安装块、滚筒、微型电机和红外摄像云台,所述第一气动伸缩杆顶部与安装板底部螺栓连接,所述安装板内槽壁与第三气动伸缩杆的固定杆固定连接,所述第三气动伸缩杆与电磁换向阀顶部出气口管道连接,所述第三气动伸缩杆活塞杆左端与工形安装块右端螺栓连接,所述工形安装块左端开口板均与滚筒转动连接,所述工形安装块前端与微型电机螺栓连接,所述微型电机后端传动轴与红外摄像云台顶部连杆固定连接,所述微型电机和红外摄像云台均与plc控制器电信号连接,所述微型电机和红外摄像云台均与蓄能器电连接。
7.优选的,所述防护机构包括安装杠、防撞弹簧筒、压力传感器、防护外壳、感应雷达和切断刃,所述无人车左端的防撞杠与安装杠螺栓连接,所述安装杠右端底侧与防撞弹簧筒移动杆螺栓连接,所述防撞弹簧筒顶部与无人车左底部螺栓连接,所述防撞弹簧筒前端与压力传感器螺栓连接,所述压力传感器左端传感头与安装杠右端底侧螺栓连接,所述安装杠左端与防护外壳螺栓连接,所述防护外壳前后两端均与感应雷达固定连接,所述防护外壳左端与切断刃螺栓连接,所述压力传感器和感应雷达均与plc控制器电信号连接,所述压力传感器和感应雷达均与蓄能器电连接。
8.优选的,所述无人车内下腔底部与蓄能器螺栓连接,所述无人车、信号连接器和定位模块均与蓄能器电连接。
9.优选的,所述移动板底部共设有六组限位筒和减震弹簧,且六组限位筒和减震弹簧分两行呈自左向右等距分布。
10.优选的,所述第一气动伸缩杆的转动角度区间为0度到90度,且第一气动伸缩杆的最大延伸长度为2米。
11.优选的,所述第三气动伸缩杆与移动板呈平行关系,且红外摄像云台的转动角度区间为90度到270度。
12.优选的,所述无人车左端共设有六组切断刃,且六组切断刃的三角刃口角度均为60度。
13.优选的,所述减震弹簧材质为高碳钢。
14.优选的,所述切断刃材质为材料钢。
15.本实用新型具有如下优点:本实用新型通过改进在此提供一种野生动物识别用的多功能无人车,与同类型设备相比,具有如下改进:
16.本实用新型所述一种野生动物识别用的多功能无人车,通过设置了识别机构在无人车内部,设置限位筒和减震弹簧,提高对移动板的减震效果,设置移动板和放置槽,提高对辅助机构的安装和放置收纳效果,设置第一气动伸缩杆和第二气动伸缩杆,提高对辅助机构的转动和高度调节效果,设置微型气泵和电磁换向阀,提高气流的导流和对第一气动伸缩杆等部件的带动效果。
17.本实用新型所述一种野生动物识别用的多功能无人车,通过设置了辅助机构在第一气动伸缩杆顶部,设置第三气动伸缩杆和工形安装块,有利于提高对红外摄像云台水平位置的调节效果,设置滚筒和微型电机,有利于通过滚动拉开树枝等阻挡物,有利于提高对红外摄像云台的转动调节效果。
18.本实用新型所述一种野生动物识别用的多功能无人车,通过设置了防护机构在无人车左侧,设置防撞弹簧筒和压力传感器,有利于提高对防撞力度的检测效果,设置防护外壳和切断刃,有利于提高对无人车头部的防护和避免杂草等杂物在无人车头部出现缠绕现象。
附图说明
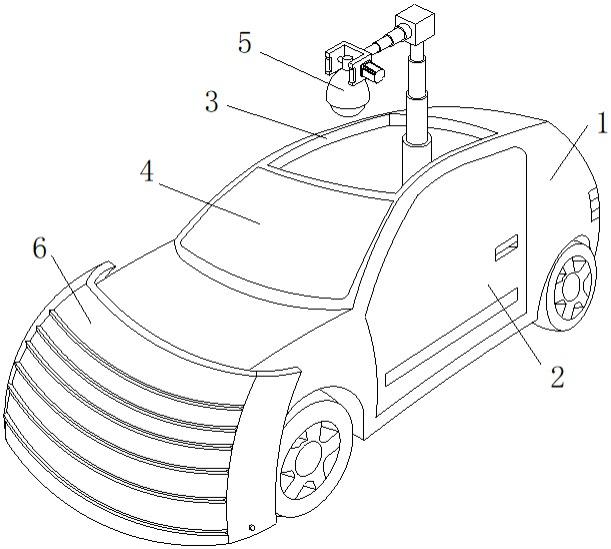
19.图1是本实用新型结构示意图;
20.图2是本实用新型的识别机构以及无人车内部结构示意图;
21.图3是本实用新型的图2中a处的放大结构示意图;
22.图4是本实用新型的辅助机构结构示意图;
23.图5是本实用新型的防护机构结构示意图。
24.其中:无人车-1、开合门-2、天窗开口-3、挡风玻璃-4、识别机构-5、防护机构-6、信号连接器-7、定位模块-8、储物腔-9、蓄能器-10、限位筒-51、减震弹簧-52、移动板-53、放置槽-54、安装绞座-55、第一气动伸缩杆-56、辅助机构-57、电动天窗-58、微型气泵-59、电磁换向阀-510、第二气动伸缩杆-511、plc控制器-512、安装板-571、第三气动伸缩杆-572、工形安装块-573、滚筒-574、微型电机-575、红外摄像云台-576、安装杠-61、防撞弹簧筒-62、压力传感器-63、防护外壳-64、感应雷达-65、切断刃-66。
具体实施方式
25.下面将结合附图1-5对本实用新型进行详细说明,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.请参阅图1,本实用新型的一种野生动物识别用的多功能无人车,包括无人车1、开合门2、天窗开口3、挡风玻璃4、识别机构5、防护机构6、信号连接器7、定位模块8、储物腔9和蓄能器10,无人车1前后两侧均与开合门2铰链连接,无人车1顶部设有天窗开口3,无人车1前端顶部设有挡风玻璃4,无人车1内下腔底部与信号连接器7螺栓连接,信号连接器7顶部与定位模块8螺栓连接,无人车1内右侧设有储物腔9,无人车1内下腔底部与蓄能器10螺栓连接,无人车1、信号连接器7和定位模块8均与蓄能器10电连接。
27.请参阅图2、图3和图4,本实用新型的一种野生动物识别用的多功能无人车,识别机构5设于无人车1内部,提高识别效果,识别机构5包括限位筒51、减震弹簧52、移动板53、放置槽54、安装绞座55、第一气动伸缩杆56、辅助机构57、电动天窗58、微型气泵59、电磁换向阀510、第二气动伸缩杆511和plc控制器512,无人车1内上腔底部与限位筒51螺栓连接,提高限位筒51的固定效果,无人车1内上腔底部与减震弹簧52弹性连接,提高减震弹簧52的减震效果,限位筒51活塞杆顶部与移动板53螺栓连接,提高限位筒51的限位效果,减震弹簧52顶部与移动板53弹性连接,提高减震弹簧52的减震效果,移动板53前后两端均与无人车1内壁滑动连接,提高移动板53的移动效果,移动板53底部左侧设有放置槽54,提高对辅助机构57的收纳效果,移动板53顶部左侧与安装绞座55螺栓连接,提高安装绞座55的固定效果,安装绞座55圆心转轴与第一气动伸缩杆56底部连接件固定连接,提高第一气动伸缩杆56的
转动效果,第一气动伸缩杆56顶部设有辅助机构57,提高识别效果,第一气动伸缩杆56右端与电动天窗58相接触,提高电动天窗58的限位效果,天窗开口3内槽壁与电动天窗58滑动连接,提高电动天窗58的收纳效果,移动板53顶部右侧与微型气泵59螺栓连接,提高微型气泵59的固定效果,微型气泵59出气口与电磁换向阀510进气口管道连接,提高微型气泵59的导流效果,电磁换向阀510左端出气口与第一气动伸缩杆56进气口管道连接,提高电磁换向阀510的导流效果,电磁换向阀510右端出气口与第二气动伸缩杆511进气口管道连接,提高电磁换向阀510的导流效果,第二气动伸缩杆511活塞杆左端与第一气动伸缩杆56右端安装座转动连接,提高第二气动伸缩杆511的带动效果,第二气动伸缩杆511固定杆底部与移动板53顶部右侧的安装座转动连接,提高第二气动伸缩杆511的转动效果,无人车1内上腔底部与plc控制器512螺栓连接,提高plc控制器512的固定效果,电动天窗58、微型气泵59和电磁换向阀510均与plc控制器512电信号连接,提高plc控制器512的控制效果,电动天窗58、微型气泵59、电磁换向阀510和plc控制器512均与蓄能器10电连接,防护机构6设于无人车1左端,提高防护效果,辅助机构57包括安装板571、第三气动伸缩杆572、工形安装块573、滚筒574、微型电机575和红外摄像云台576,第一气动伸缩杆56顶部与安装板571底部螺栓连接,提高安装板571的固定效果,安装板571内槽壁与第三气动伸缩杆572的固定杆固定连接,提高第三气动伸缩杆572的固定效果,第三气动伸缩杆572与电磁换向阀510顶部出气口管道连接,提高第三气动伸缩杆572的进气效果,第三气动伸缩杆572活塞杆左端与工形安装块573右端螺栓连接,提高第三气动伸缩杆572的带动效果,工形安装块573左端开口板均与滚筒574转动连接,提高滚筒574的转动效果,工形安装块573前端与微型电机575螺栓连接,提高微型电机575的固定效果,微型电机575后端传动轴与红外摄像云台576顶部连杆固定连接,提高微型电机575的带动效果,微型电机575和红外摄像云台576均与plc控制器512电信号连接,微型电机575和红外摄像云台576均与蓄能器10电连接,移动板53底部共设有六组限位筒51和减震弹簧52,且六组限位筒51和减震弹簧52分两行呈自左向右等距分布,提高绝对移动板53的减震效果,第一气动伸缩杆56的转动角度区间为0度到90度,且第一气动伸缩杆56的最大延伸长度为2米,提高第一气动伸缩杆56的转动效果,第三气动伸缩杆572与移动板53呈平行关系,且红外摄像云台576的转动角度区间为90度到270度,提高红外摄像云台576的扇形转动效果。
28.请参阅图5,本实用新型的一种野生动物识别用的多功能无人车,防护机构6包括安装杠61、防撞弹簧筒62、压力传感器63、防护外壳64、感应雷达65和切断刃66,无人车1左端的防撞杠与安装杠61螺栓连接,提高安装杠61的固定效果,安装杠61右端底侧与防撞弹簧筒62移动杆螺栓连接,提高防撞弹簧筒62的防撞效果,防撞弹簧筒62顶部与无人车1左底部螺栓连接,提高防撞弹簧筒62的固定效果,防撞弹簧筒62前端与压力传感器63螺栓连接,提高压力传感器63的固定效果,压力传感器63左端传感头与安装杠61右端底侧螺栓连接,提高压力传感器63的传感效果,安装杠61左端与防护外壳64螺栓连接,提高防护外壳64的固定效果,防护外壳64前后两端均与感应雷达65固定连接,提高感应雷达65的固定效果,防护外壳64左端与切断刃66螺栓连接,提高切断刃66的固定效果,压力传感器63和感应雷达65均与plc控制器512电信号连接,压力传感器63和感应雷达65均与蓄能器10电连接,无人车1左端共设有六组切断刃66,且六组切断刃66的三角刃口角度均为60度,提高切断刃66的剪切效果,避免杂草等物质的缠绕现象。
29.本实用新型通过改进提供一种野生动物识别用的多功能无人车,其工作原理如下;
30.第一,使用本设备时,首先将本设备放置在工作区域中,然后将装置与外部电源相连接,即可为本设备提供工作所需的电源;
31.第二,工作人员先通过外部计算机对plc控制器512进行编程工作,并通过信号连接器7与控制中心进行连接,工作人员通过控制终端控制无人车1进行移动,当无人车1移动时,通过控制plc控制器512执行程序,从而使plc控制器512控制电动天窗58进行工作,从而使天窗开口3保持敞开状态,然后通过控制微型气泵59和电磁换向阀510进行工作,从而使微型气泵59通过气流使第二气动伸缩杆511进行收缩动作,从而使第二气动伸缩杆511带动第一气动伸缩杆56在安装绞座55的转动作用下进行转动,从而使第一气动伸缩杆56带动辅助机构57进行转动,然后通过电磁换向阀510进行工作,从而使微型气泵59与第一气动伸缩杆56之间的管道进行连接,然后通过微型气泵59带动第一气动伸缩杆56进行延伸,从而使第一气动伸缩杆56带动安装板571向上进行移动;
32.第三,然后通过红外摄像云台576对环境进行观察,并通过感应雷达65对四周环境进行监测,有利于提高对无人车1移动时的观察效果,无人车1移动时遇到杂草等物件时,通过防护外壳64对杂物进行推开等动作,同时切断刃66能有效将贴合在防护外壳64表面的杂草等植物进行切割动作,有利于避免杂草等植物在防护外壳64处进行缠绕动作,同时当无人车1遇到阻碍物时,阻碍物通过防护外壳64挤压防撞弹簧筒62,从而使压力传感器63传感到压力,并将数据通过信号连接器7输送给控制终端,工作人员可通过数据大小判断是否进行绕路等动作,有利于避免无人车1出现较大规模的撞击现象;
33.第四,在无人车1进行移动时,通过限位筒51和减震弹簧52能较大限度地减弱移动板53受到的振动力度,工形安装块573左端的滚筒574能将树枝等阻碍物拨开,有利于最大限度地避免外部物体对红外摄像云台576的影响,通过可通过微型气泵59和电磁换向阀510的工作,从而控制第三气动伸缩杆572带动工形安装块573进行移动效果,有利于提高对红外摄像云台576的水平位置调节效果,在不需要进行移动时,可通过第一气动伸缩杆56和第二气动伸缩杆511将红外摄像云台576转动收缩放置进放置槽54内部,有利于提高对红外摄像云台576的收纳效果。
34.本实用新型通过改进提供一种野生动物识别用的多功能无人车,设置限位筒51和减震弹簧52,提高对移动板53的减震效果,设置移动板53和放置槽54,提高对辅助机构57的安装和放置收纳效果,设置第一气动伸缩杆56和第二气动伸缩杆511,提高对辅助机构57的转动和高度调节效果,设置微型气泵59和电磁换向阀510,提高气流的导流和对第一气动伸缩杆56等部件的带动效果,设置第三气动伸缩杆572和工形安装块573,有利于提高对红外摄像云台576水平位置的调节效果,设置滚筒574和微型电机575,有利于通过滚动拉开树枝等阻挡物,有利于提高对红外摄像云台576的转动调节效果,设置防撞弹簧筒62和压力传感器63,有利于提高对防撞力度的检测效果,设置防护外壳64和切断刃66,有利于提高对无人车1头部的防护和避免杂草等杂物在无人车1头部出现缠绕现象。
35.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,并且本实用新型使用到的标准零件均可以从市场上购买,异形件根据说明书的和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓铆钉、焊接等常规
手段,机械、零件和设备均采用现有技术中,常规的型号,加上电路连接采用现有技术中常规的连接方式,在此不再详述。
36.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1