车辆的制作方法
1.本实用新型涉及车辆技术领域,尤其是涉及一种车辆。
背景技术:
2.随着科技的发展,车辆在人们交通出行中的重要性日益突出,人们对车辆的性能要求也越来越高。人们在驾驶车辆时,需要通过电机控制系统对车轮进行驱动和转向的控制,以实现车辆的正常行驶。
3.在相关技术中,车辆采用轮毂电机对车轮进行驱动,并且采用线控转向系统对车轮进行转向控制,这样会存在车辆结构复杂,车辆制造成本较高的问题,并且车辆空间利用率低,会降低用户使用体验。
技术实现要素:
4.本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型的一个目的在于提出一种车辆,该车辆的车轮控制系统集成性强,空间利用率高。
5.根据本实用新型的车辆,包括:方向盘控制系统;控制器,所述控制器与所述方向盘控制系统电连接;以及车轮控制系统,所述车轮控制系统包括:驱动组件、传动组件、转向组件和车轮,所述传动组件连接于两个所述车轮之间,所述转向组件连接于两个所述车轮之间,所述驱动组件包括:第一电机控制器、驱动电机和减速器,所述第一电机控制器分别与所述控制器和所述驱动电机电连接,所述驱动电机与所述减速器传动连接,所述减速器分别与所述传动组件和所述转向组件传动连接。
6.由此,通过将驱动组件、传动组件和转向组件集成在车轮控制系统内,使车轮控制系统可以同时控制车轮的驱动和转向,这样可以减小车轮控制系统的占用空间,提高车辆的空间利用率,可以降低车辆的制造成本。
7.在本实用新型的一些示例中,所述减速器包括:输入轴、太阳轮、行星轮、行星架和齿圈,所述输入轴与所述驱动电机传动连接且所述太阳轮设置于所述输入轴上,所述行星轮设置于所述行星架上且啮合在所述太阳轮和所述齿圈之间,所述行星架和所述齿圈中的一个与所述传动组件传动连接且另一个与所述转向组件传动连接。
8.在本实用新型的一些示例中,所述传动组件包括:差速器和两个半轴,所述差速器的输入端设置有输入齿轮,所述输入齿轮啮合在所述齿圈的外侧,两个所述半轴分别设置于所述差速器的输出端且分别与所述车轮相连接。
9.在本实用新型的一些示例中,所述转向组件包括:转向器和两个拉杆,所述转向器与所述行星架传动连接,两个所述拉杆分别设置于所述转向器的两端且分别与所述车轮相连接。
10.在本实用新型的一些示例中,所述行星架设置有主动轮,所述转向器包括:壳体、从动轮、螺母和丝杠,所述从动轮、所述螺母和所述丝杠设置于所述壳体内,所述从动轮与所述主动轮传动连接,所述螺母设置于所述从动轮内且与所述丝杠螺纹配合,所述丝杠的
两端分别与所述拉杆相连接。
11.在本实用新型的一些示例中,所述丝杠的两端分别与所述拉杆铰接连接。
12.在本实用新型的一些示例中,所述第一电机控制器集成在所述驱动电机内。
13.在本实用新型的一些示例中,所述方向盘控制系统包括:方向盘、转向柱、转角扭矩传感器、路感电机和第二电机控制器,所述方向盘、所述转角扭矩传感器和所述路感电机设置于所述转向柱上,所述第二电机控制器与所述路感电机电连接,所述转角扭矩传感器和所述第二电机控制器均与所述控制器电连接。
14.在本实用新型的一些示例中,所述第二电机控制器集成在所述路感电机内。
15.在本实用新型的一些示例中,所述车轮控制系统为两个且分别为前轮控制系统和后轮控制系统。
16.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
17.本实用新型的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
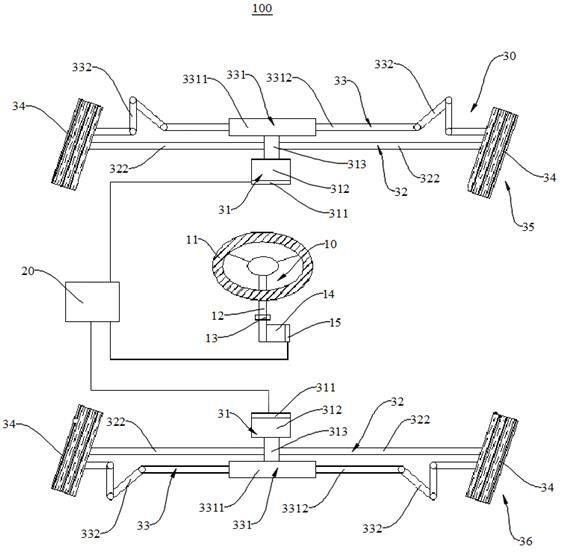
18.图1是根据本实用新型实施例的车辆的结构示意图;
19.图2是根据本实用新型实施例的减速器和差速器的原理示意图。
20.附图标记:
21.100、车辆;
22.10、方向盘控制系统;11、方向盘;12、转向柱;13、转角扭矩传感器;14、路感电机;15、第二电机控制器;
23.20、控制器;
24.30、车轮控制系统;31、驱动组件;311、第一电机控制器;312、驱动电机;313、减速器;3131、输入轴;3132、太阳轮;3133、行星轮;3134、行星架;3135、齿圈;32、传动组件;321、差速器;322、半轴;323、输入齿轮;33、转向组件;331、转向器;3311、壳体;3312、丝杠;332、拉杆;34、车轮;35、前轮控制系统;36、后轮控制系统。
具体实施方式
25.下面详细描述本实用新型的实施例,参考附图描述的实施例是示例性的。
26.下面参考图1和图2描述根据本实用新型实施例的车辆100。
27.结合图1所示,根据本实用新型的车辆100可以主要包括:方向盘控制系统10、控制器20和车轮控制系统30。其中,控制器20与方向盘控制系统10电连接,车轮控制系统30的驱动组件31和控制器20电连接。具体地,方向盘控制系统10和控制器20电连接,控制器20又和车轮控制系统30的驱动组件31电连接,这样控制器20可以对来自方向盘控制系统10的数据进行分析处理,并且进一步地发出指令,控制驱动组件31做出相应的反应,从而可以使用户通过对方向盘11的操作,实现对车辆100的驱动和转向控制,可以保证车辆100的正常行驶。
28.结合图1所示,车轮控制系统30可以主要包括:驱动组件31、传动组件32、转向组件33和车轮34,传动组件32连接于两个车轮34之间,转向组件33连接于两个车轮34之间,驱动
组件31分别与传动组件32和转向组件33传动连接。具体地,驱动组件31和传动组件32传动连接,传动组件32连接于两个车轮34之间,这样驱动组件31可以将驱动力传递至传动组件32,并且通过传动组件32的作用,驱动两个车轮34进行转动,从而可以实现对车辆100的驱动。
29.进一步地,驱动组件31和转向组件33传动连接,转向组件33连接于两个车轮34之间,这样驱动组件31可以将驱动力传递至转向组件33,并且通过转向组件33的作用,使两个车轮34对应发生转向,从而可以实现对车辆100转向的控制。
30.结合图1所示,驱动组件31可以主要包括:第一电机控制器311、驱动电机312和减速器313,第一电机控制器311分别与控制器20和驱动电机312电连接,驱动电机312与减速器313传动连接,减速器313分别与传动组件32和转向组件33传动连接。具体地,控制器20与第一电机控制器311电连接,第一电机控制器311又和驱动电机312电连接,这样第一电机控制器311可以接收控制器20的数据指令,并发送信号至驱动电机312,控制驱动电机312做出相应动作。进一步地,驱动电机312和减速器313传动连接,减速器313分别与传动组件32和转向组件33传动连接,这样减速器313可以在驱动电机312与传动组件32,以及驱动电机312与转向组件33之间起到匹配转速和传递转矩的作用,从而不仅可以提升车辆100的稳定性和可靠性,而且可以实现驱动组件31分别对传动组件32和转向组件33的传动,可以实现车轮控制系统30对车轮34的驱动和转向的集成功能。
31.由此,通过将驱动组件31、传动组件32和转向组件33集成在车轮控制系统30内,使车轮控制系统30可以同时控制车轮34的驱动和转向,这样可以减小车轮控制系统30的占用空间,提高车辆100的空间利用率,可以降低车辆100的制造成本。
32.结合图1和2所示,减速器313可以主要包括:输入轴3131、太阳轮3132、行星轮3133、行星架3134和齿圈3135,输入轴3131与驱动电机312传动连接,并且太阳轮3132设置于输入轴3131上,行星轮3133设置于行星架3134上,并且啮合在太阳轮3132和齿圈3135之间,行星架3134和齿圈3135中的一个与传动组件32传动连接,并且另一个与转向组件33传动连接。具体地,减速器313的输入轴3131和驱动电机312传动连接,从而将驱动电机312的动力传递至减速器313。进一步地,太阳轮3132设置于输入轴3131上,行星轮3133设置于行星架3134上,并且啮合在太阳轮3132和齿圈3135之间,这样可以通过行星轮3133和齿圈3135与太阳轮3132的啮合,实现减速器313降低转速,增加转矩的作用,从而可以提升车辆100的行驶性能。
33.进一步地,行星架3134和齿圈3135的一个与传动组件32传动连接,并且另一个与转向组件33传动连接,这样行星架3134和齿圈3135可以作为减速器313的两个输出端,可以实现减速器313分别与传动组件32和转向组件33的传动连接,从而可以实现车轮控制系统30对车轮34的驱动和转向的集成功能。
34.结合图1和图2所示,传动组件32可以主要包括:差速器321和两个半轴322,差速器321的输入端设置有输入齿轮323,输入齿轮323啮合在齿圈3135的外侧,两个半轴322分别设置于差速器321的输出端,并且分别与车轮34相连接。具体地,输入齿轮323设置在差速器321的输入端,输入齿轮323啮合在齿圈3135的外侧,从而可以将减速器313的动力传递至差速器321,可以保证差速器321的动力输入。进一步地,两个半轴322分别设置于差速器321的输出端,并且分别和车轮34相连接,这样在车辆100转弯行驶或在不平路面上行驶时,车辆
100的车轮34可以以不同转速转动,从而可以保证车辆100的正常行驶,可以提升车辆100的行驶性能。
35.结合图1和图2所示,转向组件33可以主要包括:转向器331和两个拉杆332,转向器331与行星架3134传动连接,两个拉杆332分别设置于转向器331的两端,并且分别与车轮34相连接。具体地,转向器331与行星架3134传动连接,从而实现转向器331的动力输入。进一步地,转向器331的两端分别设置有两个拉杆332,两个拉杆332分别与车轮34相连接,这样两个拉杆332可以在转向器331的控制下发生运动,并且带动与之相连接的车轮34发生转向,从而可以实现车辆100的转向,可以保证车辆100的正常行驶。
36.结合图1和图2所示,行星架3134设置有主动轮,转向器331可以主要包括:壳体3311、从动轮、螺母和丝杠3312,从动轮、螺母和丝杠3312设置于壳体3311内,从动轮与主动轮传动连接,螺母设置于从动轮内,并且与丝杠3312螺纹配合,丝杠3312的两端分别与拉杆332相连接。具体地,转向器331的从动轮、螺母和丝杠3312均设置于壳体3311内,壳体3311可以对从动轮、螺母和丝杠3312起到罩设保护的作用,可以防止外界异物的侵蚀和外力的冲击,破坏从动轮、螺母和丝杠3312的结构,以及相互之间的配合关系,从而可以保证转向器331结构的稳定性,可以保证转向器331的正常工作。
37.进一步地,行星架3134设置有主动轮,主动轮与转向器331的从动轮传动连接,螺母设置于从动轮内,并且与丝杠3312螺纹配合,丝杠3312的两端分别与拉杆332相连接。具体地,将行星架3134上的主动轮和转向器331的从动轮设置为带传动,传动带将主动轮的动力传递至从动轮,使从动轮发生转动,由于螺母设置于从动轮内,螺母将随从动轮发生转动。进一步地,螺母和丝杠3312螺纹配合,丝杠3312的两端分别和拉杆332相连接,这样可以将螺母的回转运动转化为丝杠3312的直线运动,从而可以使丝杠3312带动拉杆332运动,进而可以控制与丝杠3312连接的车轮34的转向。
38.结合图1所示,丝杠3312的两端分别与拉杆332铰接连接,这样不仅可以保证丝杠3312与拉杆332连接的稳定性和牢固性,而且在丝杠3312驱动拉杆332移动,以使车轮34进行转向的过程中,可以使丝杠3312对拉杆332的驱动更加稳定顺畅,可以提升车轮34转向的平顺性,从而可以提升用户对车辆100的使用体验。
39.结合图1所示,第一电机控制器311集成在驱动电机312内。具体地,将第一电机控制器311集成在驱动电机312内,不仅可以提升驱动组件31的集成性,可以提升车辆100的空间利用率,而且可以使第一电机控制器311直接发送信号给驱动电机312,可以提升第一电机控制器311和驱动电机312之间的信息传输效率。
40.结合图1所示,方向盘控制系统10可以主要包括:方向盘11、转向柱12、转角扭矩传感器13、路感电机14和第二电机控制器15,方向盘11、转角扭矩传感器13和路感电机14设置于转向柱12上,第二电机控制器15与路感电机14电连接,转角扭矩传感器13和第二电机控制器15均与控制器20电连接。具体地,方向盘11、转角扭矩传感器13、路感电机14均设置于转向柱12上,第二电机控制器15与路感电机14电连接,这样当用户对方向盘11进行转向操作时,设置于转向柱12上的转角扭矩传感器13可以对应测量方向盘11的扭矩和转角,并且将测量数据发送给第二电机控制器15。进一步地,第二电机控制器15接收的车辆100运动状态和路面状态信息,并将该信息发送给路感电机14,从而可以使路感电机14输出相应的转速和转矩,并向方向盘11反馈模拟路感,进而可以方便驾驶员对驾驶操作进行修正,可以提
升车辆100驾驶的安全性。
41.进一步地,转角扭矩传感器13和第二电机控制器15均与控制器20电连接,这样可以将转角扭矩传感器13测量所得的方向盘11的扭矩和转角发送至控制器20,并且可以将第二电机控制器15接收的车辆100运动状态和路面状态信息发送至控制器20,从而可以使控制器20可以对车辆100的运行情况进行分析处理,并进一步地对车辆100的驱动组件31进行控制,可以保证车辆100的正常行驶。
42.结合图1所示,第二电机控制器15集成在路感电机14内。具体地,将第二电机控制器15集成在路感电机14内,这样不仅可以提升方向盘控制系统10的集成性,可以提升车辆100的空间利用率,而且可以使第二电机控制器15将信号直接发送给路感电机14,可以提升第二电机控制器15和路感电机14之间的信息传输效率。
43.结合图1所示,车轮控制系统30为两个,并且分别为前轮控制系统35和后轮控制系统36。具体地,将车轮控制系统30设置为两个,并且分别为前轮控制系统35和后轮控制系统36,控制器20分别和前轮控制系统35和后轮控制系统36电连接,前轮控制系统35控制车辆100前轮的驱动和转向,后轮控制系统36控制车辆100后轮的驱动和转向,从而可以实现车轮控制系统30对车辆100前轮和后轮的分别控制,可以提升车辆100的行驶性能。
44.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
45.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。
46.尽管已经示出和描述了本实用新型的实施例,本领域的普通技术人员可以理解:在不脱离本实用新型的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1