用于在包括车辆的内部和外部区域的车辆检测场中检测物体的方法与流程
1.本发明涉及用于在包括车辆的内部和外部区域的车辆检测场中检测物体的方法。本发明还涉及用于在车辆检测场中检测物体的检测系统。本发明同样涉及包括这种检测系统的驾驶辅助系统以及具有这种检测系统或驾驶辅助系统的车辆。本发明还可以涉及包括指令的计算机程序,当计算机执行该计算机程序时,该指令使计算机执行该方法的步骤。本发明还可以涉及传输计算机程序的数据载体信号。本发明还可以包括计算机可读介质,该介质包括指令,当由计算机执行时,该指令使计算机执行该方法的步骤。
背景技术:
2.美国公开出版物us2018/0072156a1公开了一种用于机动车辆的a柱视频监控系统,用于允许驾驶员从车辆侧面看到交通状况,比如儿童奔跑或接近汽车。为此,左侧或右侧摄像机安装在机动车辆的左侧或右侧。每个摄像机附件具有大致横向定向的微型摄像机视角和壳体或盖,该壳体或盖以流动优化整流罩的形式布置在相关的摄像机上,以保护其并最小化从车辆侧面横向突出的量。整流罩还避免了不必要的气流湍流,从而优化车辆。由这些摄像机装置观察到的图像在无缝集成到车辆的a柱中的曲面屏幕或监视器上再现。驾驶员可以密切关注四周的情况,而不必将注意力从道路移开。在安全气囊展开的情况下,弯曲的监视器打开以保护驾驶员且安全气囊展开。
3.在类似的领域中,公开出版物ep1974998a1公开了一种驾驶辅助方法和设备,用于捕获以盲点形式被遮蔽的区域,当从驾驶员位置看后视镜时,由于车辆的柱的存在而出现盲点,并且由于柱而产生。该设备捕获驾驶员的头部位置,捕获后视镜的角度,基于所捕获的驾驶员的头部位置和所捕获的后视镜的角度计算以盲点形式被遮蔽的区域,并且将对应于盲点的区域的图像投影到柱上,其中投影的图像由源自安装在车辆外部的至少一个盲点摄像机的图像数据形成。
4.随着车辆自动化程度的提高,通过传感器捕捉车辆周围环境的需求普遍增加。鉴于自主驾驶,车辆检测场的检测变得越来越重要。一方面,需要来自车辆外部区域的环境信息或物体检测,以实现自主驾驶车辆与其环境的安全交互。安装在车辆外部的邻近捕获传感器单元迄今已被用于此目的。然而,另一方面,也使用来自内部的信息或物体检测来实现驾驶员的手势识别或总体捕获驾驶员的行为,从而可以确保驾驶员的健康并且他们也感知尽可能直观的驾驶体验。安装在车辆内部的内部监控传感器单元迄今已被用于此目的。
5.因此,根据现有技术的驾驶辅助方法和相关驾驶辅助系统是需要额外的传感器或传感器单元、计算系统和屏幕系统的系统,以便实施前述方法,例如补偿盲点。这意味着能量需求增加,从而缩短了车辆的行驶里程。此外,需要额外的部件,这增加了生产和组装的费用。此外,额外的部件增加了车辆的总重量。
技术实现要素:
6.因此,从上述现有技术出发,本发明的目的是提出用于在车辆检测领域中检测物体的改进方法以及相应的检测系统或驾驶辅助系统和车辆。
7.根据本发明,该目的通过独立权利要求的特征来实现。从属权利要求中规定了本发明的有利配置。
8.根据本发明,因此规定了一种用于在第一车辆检测场中检测物体的方法,该第一车辆检测场包括车辆的内部和外部区域。该方法至少包括以下步骤:利用第一传感器单元检测第一车辆检测场的外部区域(例如盲点区域或车辆前方的近距离)中(或车辆的外部区域中)的物体(例如车辆附近或外部区域中的其他车辆或任何其他物体)作为第一检测数据,并且利用第一传感器单元检测第一车辆检测场的内部(或车辆的内部)中的物体(例如车辆的人或乘员,比如车辆的驾驶员或使用者)作为第二检测数据。因此,可以准确地使用一个传感器单元来检测第一车辆检测场的外部区域(例如盲点区域或近距离)中的物体和第一车辆检测场的内部中的物体(例如人或乘员)。然后在计算单元中或使用计算单元处理第一和第二检测数据。
9.根据本发明,还规定了一种用于在第一车辆检测场中检测物体的检测系统,该第一车辆检测场包括车辆的内部和外部区域。检测系统包括:第一传感器单元,其设计成检测第一车辆检测场的外部区域(例如盲点区域或车辆前方的近距离)中(或车辆的外部区域中)的物体(例如车辆附近或外部区域中的其他车辆或任何其他物体)作为第一检测数据,并且用于检测第一车辆检测场的内部(或车辆的内部)中的物体(例如车辆的人或乘员,比如车辆的驾驶员或使用者)作为第二检测数据。检测系统或传感器单元还包括用于处理第一和第二检测数据的计算单元。该方法的特征或配置同样优选用于检测系统。
10.根据本发明,还提出了一种用于提供驾驶辅助功能的驾驶辅助系统,其包括先前描述的检测系统。驾驶辅助系统还可以具有控制单元,其设计成基于(第一和第二)检测数据提供驾驶辅助功能。驾驶辅助系统通常还可以包括用于执行上述方法的步骤的装置。驾驶辅助功能例如可以提供自主或半自主驾驶的辅助,尤其是相应的自主或半自主车辆的辅助。驾驶辅助功能例如可以在不同的驾驶情况下为车辆驾驶员提供辅助。驾驶辅助功能尤其可以是自动紧急制动、自动车道保持(车道保持辅助)等。
11.本发明还规定了一种具有上述检测系统的车辆。本发明还规定了一种具有前述驾驶辅助系统的车辆。例如,车辆可以是机动车辆或卡车。
12.此外,本发明可以规定一种包括指令的计算机程序,当计算机执行该计算机程序时,指令使计算机执行该方法的步骤。计算机程序是用于执行特定任务的指令的集合,该特定任务设计成解决特定类别的问题。程序的指令设计成由计算机执行,其中计算机必须能够执行程序,以使其运行。
13.本发明还可以规定一种传输计算机程序的数据载体信号。本发明还可以规定一种包括指令的计算机可读介质,当由计算机执行时,指令使计算机执行该方法的步骤。
14.本发明的基本概念是扩展传感器单元的功能,使得多个传感器单元的功能被组合到更少的传感器单元中。在特定示例中,这意味着,例如,先前单独的邻近捕获传感器单元(例如用于盲点检测的传感器单元)可以与先前单独的内部监控传感器单元(例如用于乘客检测的传感器单元)组合,以形成一个相应定位的传感器单元。因此,对传感器单元的需求
减半。因此,乘员识别功能与道路检测相结合。此外,本发明的基本概念是限定传感器单元的相应位置或定位,特别是在车辆内部的车辆a柱上。
15.此外,当各个乘员转过他们的脸时,对乘员的眼睛位置的改进检测是可能的。(自主或半自主)驾驶辅助系统(例如紧急制动系统)的功能性也由于相对于检测目标的可最佳设定的角度而得到改善。传感器单元的位置越靠近车辆前部或发动机罩前部,具有越好的检测角度,例如当行人穿过有障碍物的道路时。例如,这种障碍物可以是停放的汽车。(自主或半自主)紧急制动系统是用于机动车辆的预测驾驶辅助系统,其在危险情况下警告驾驶员,提供紧急制动辅助,充当制动辅助,和/或自动制动。这是为了避免与障碍物碰撞和/或降低碰撞速度。为此,先前已知的具有紧急制动辅助的车辆通常具有单独的传感器,用于确定距离、加速度、转向角、方向盘角度和踏板位置。
16.在内部安装传感器单元的情况下,另一个优点是车辆挡风玻璃清洁系统的多功能使用。因此,传感器单元不需要额外的清洁系统。
17.此外,驾驶辅助系统的传感器单元(例如摄像机)可以为车辆的驱动系统提供足够的信息以到达其目的地,并且以不同于正常模式的模式例如紧急模式来驱动车辆。在正常模式下,所有传感器都正常工作。相比之下,紧急模式仅适用于将车辆开到车间或另一停车位。传感器单元在这里可以用作冗余传感器单元或者作为主前置摄像机的备份。换句话说,除了传统的前置摄像机之外,还可以使用传感器单元。这意味着传感器单元支持冗余或可用于紧急模式。
18.因为车辆通常具有透明的窗户,或者在敞篷车的情况下是敞开的,所以至少一个传感器单元可以通过内部和外部区域进行检测。因此,这消除了对其他传感器单元的需要。这导致更轻的重量和更低的成本,因为更少的检测系统组件和更少的能量消耗,因为需要更少的计算能力。
19.内部也可以称为车辆的内部区域。特别地,内部可以是人或车辆乘员(例如驾驶员或使用者)所在的车辆空间(例如乘客车厢)。
20.外部区域可被限制为至少车辆外部的区域,邻近车辆侧,即在驾驶员侧和乘客侧。然而,外部区域还可以另外指车辆外部的至少一个区域,其靠近车辆的前部和/或后部。
21.在本发明的教导公开了至少一个传感器单元的情况下,这意味着它可以应用于任何传感器单元。因此,如果车辆具有两个或更多个传感器单元,这些传感器单元中的每个都可以但不必须具有权利要求的相应特征。
22.根据本发明的有利实施例,该方法还适用于通过车辆的至少一个第二传感器单元来检测第二车辆检测场中的物体,该第二车辆检测场包括车辆的内部和外部区域。这里,该方法还可以包括以下步骤:利用第二传感器单元检测第二车辆检测场的外部区域中的物体作为第一检测数据;以及利用第二传感器单元检测第二车辆检测场的内部中的物体作为第二检测数据。因此,该系统可以包括第二传感器单元,其特别可以在结构上与第一传感器单元相同。该第二传感器单元也设计用于检测外部区域中的物体和检测内部中的物体。以这种方式,可以实现待检测区域的最佳覆盖。
23.检测系统(或相应的驾驶辅助系统或车辆)可以至少具有第一传感器单元和第二传感器单元,第一传感器单元具有包括传感器单元的特征的第一车辆检测场,第二传感器单元具有包括传感器单元的特征的第二车辆检测场。两个车辆检测场允许检测尽可能多的
内部和外部区域。在车辆检测场交叉的区域中,可以可选地执行一致性检查。这减少了可能的错误检测。例如,如果由于解剖学的原因,驾驶员只有一侧眼睑部分下垂,由于检测到眼睑完全张开的另一半脸,可以避免错误警报。这也称为一致性检查。
24.在有利实施例中,第一传感器单元和第二传感器单元彼此相对地布置在相同类型的两个车辆立柱上。相同类型的立柱例如是两个a柱、两个b柱或两个c柱。利用这种布置,一致性检查的上述优点导致特别可靠的检测结果。以这种方式,也可以相对于相对的外部区域对称地检测与柱相对的车辆的相应外部区域,从而可以获得车辆侧面区域的一致可靠的检测结果。
25.根据有利实施例,外部区域中的物体处于车辆的盲点区域中。该物体可以是例如位于本车盲点区域中的另一辆车。
26.根据有利实施例,内部中的物体是车辆的乘员(例如驾驶员)。特别地,可以检测乘员的姿势、视线和/或眼睛状态(例如闭眼)。特别地,可以检测乘员头部的位置,特别是乘员眼睛的位置(眼睛位置)。
27.传感器单元可以布置在车辆的内部中,使得内部的检测和外部区域的检测使用相应的传感器单元来执行。内部的检测可以包括乘员检测。外部区域的检测可以包括盲点检测。乘员检测和盲点检测可以一起进行。然而,也可能仅进行乘员检测或盲点检测,或者检测通常针对内部或外部区域中的不同检测。因此,至少一个传感器单元在内部中的相应布置可能足以检测车辆的内部和外部。因为车辆通常具有透明窗户,或者在敞篷车的情况下是敞开的,所以至少一个传感器单元可以通过内部区域或内部检测到外部区域中。因此,至少一个传感器单元足以例如检测至少一个乘员和重要的外部区域,特别是盲点。
28.至少驾驶员但优选地还有前排乘客和/或后座上的人可被认为是乘客。
29.在道路交通中,盲点或盲点区域是车辆的侧面区域,或车辆前方和后方的区域,尽管有后视镜,但位于封闭车辆内的驾驶员看不到该区域。该区域的大小取决于车窗和后视镜的数量。
30.这种布置节省了成本、重量和计算能力。此外,至少一个传感器单元不需要像在室外安装的情况下那样小心地保护免受外部影响,例如湿气、灰尘、污垢、石屑等。因此,至少一个传感器单元受到较少的破坏性影响,并且需要较少的建造费用。
31.根据本发明的特别有利实施例,传感器单元在车辆的内部中布置在车辆的a柱上,特别是使得传感器单元指向车辆的内部,但也可以捕获车辆的外部区域,或者使得内部和外部区域都被捕获。
32.布置在a柱上的特别优点是,安装到a柱上允许特别可靠的驾驶员或乘员检测。例如,可以特别好地检测乘员/驾驶员的姿势、视线或眼睛状态(例如闭眼)。在a柱上的布置的优点尤其是检测与a柱相对的车辆外部区域的可能性,特别是关于盲点。因此,a柱上的布置是特别有利的,因为它能够实现特别可靠的驾驶员或前排乘客检测以及外部区域的良好检测。
33.然而,在替代实施例中,传感器单元理论上也可以布置在车辆的内部中的b柱或c柱上。即使在布置在b柱或c柱上的情况下,也可以可靠地检测到与对应柱相对的车辆外部区域,特别是关于盲点。
34.柱上的布置尤其能够可靠地检测位于相应柱对面的车辆侧的外部区域。使用具体
示例,这意味着设置在驾驶员侧的柱上的传感器单元可以容易地检测前排乘客侧的外部区域,反之亦然。
35.根据本发明的有利实施例,传感器单元布置成使得其车辆检测场从第一车辆侧(例如从车辆的相应a柱)延伸至少穿过内部,横向于车辆的纵向轴线,到相对的第二车辆侧(例如到车辆的第二a柱)进入外部区域。因此,用于检测的内部的尽可能宽的区域被覆盖,结果是可以检测尽可能多的信息,以便尽可能多地减少另外传感器单元的数量。
36.根据本发明的有利实施例,传感器单元具有车辆检测场,其从相应的传感器单元开始形成至少110度、特别是至少或约120度的水平检测锥。特别地,水平检测锥可以是最大190度。这在当前系统中是可能的。已经发现,按照期望的要求,可以这种方式获取覆盖内部区域和外部区域的足够的检测数据。较小的水平检测锥导致数据太少。较大的水平检测锥导致计算系统上不必要的高计算负荷。然而,最大360度的水平检测锥也是可能的。
37.根据本发明的有利实施例,传感器单元布置成使得它具有车辆检测场,其水平检测锥至少从车辆的第一车辆侧(特别地,传感器单元也布置在其上)的前角(例如前灯)延伸到相对的第二车辆侧的车辆长度的至少三分之一(例如b柱)。这能够进行良好的驾驶员检测。此外,它能够很好地检测外部区域,因为可靠地检测行驶方向上的区域,从而这对于事故预防措施是有利的。
38.特别地,优选彼此相对放置的至少两个传感器单元可以布置成使得检测场在内部相交,从而可靠地检测乘员/驾驶员。优选彼此相对的至少两个传感器单元同样可以布置成使得检测场在外部区域中相交,从而可靠地检测车辆附近或外部区域中的物体。
39.根据本发明的有利实施例,传感器单元布置成使得其具有车辆检测场,其水平检测锥至少从车辆的相对的第二车辆侧(特别是与布置有传感器单元的一侧相对的一侧)上的前角(例如前灯)延伸到相对的第二车辆侧的车辆长度的至少三分之二(例如c柱)。这能够进行良好的驾驶员检测。此外,它能够很好地检测外部区域,因为死角中的区域被可靠地检测到,从而这对于事故预防措施是有利的。特别是当存在至少两个优选彼此相对的传感器单元时,检测场在内部相交,使得可靠地检测驾驶员。
40.根据本发明的有利实施例,传感器单元布置成使得其具有车辆检测场,其水平检测锥至少从车辆前侧(例如发动机罩前部)的设置在车辆纵向轴线上的中心区域延伸到相对的第二车辆侧的车辆长度的至少一半(例如在b柱和c柱之间)。这能够进行良好的驾驶员检测。此外,它能够很好地检测外部区域,因为可靠地检测行驶方向上的区域以及可能还有死角中的区域,从而这对于事故预防措施是有利的。特别是当存在至少两个优选彼此相对的传感器单元时,检测场在内部相交,使得可靠地检测驾驶员。因此,水平检测锥特别优选地至少延伸到也可以检测相应盲点的程度。
41.根据本发明的有利实施例,基于(第一和第二)检测数据的驾驶辅助功能,尤其是安全相关的驾驶辅助功能由驾驶辅助系统提供。迄今为止,这是通过使用来自传感器单元的检测数据来实现的,传感器单元的车辆检测场专门地、至少几乎专门地位于车辆的外部区域中。对于更广泛地使用传感器单元来说,这是一种经济高效且节能的解决方案。特别地,可以设置车辆行为(例如制动和/或转向)。
42.根据本发明的有利实施例,传感器单元是光学传感器。传感器单元或光学传感器尤其可以是摄像机或激光扫描仪。摄像机是一种照相技术设备,它可以将静态或动态图像
作为检测数据记录在照相胶片上,或者以电子方式记录在数字存储介质上,或者通过接口传输它们。摄像机是一种成本有效同时又可靠的检测手段。然而,光学传感器也可以是激光扫描仪。
43.如果需要,摄像机也可以设计成热成像摄像机。热成像摄像机,也称为夜视、热成像、热或红外摄像机,是一种成像设备,如上所述,但它接收红外辐射。红外辐射的波长范围从约0.7微米到1000微米。然而,由于典型的发射波长接近环境温度,热成像摄像机使用从约3.5微米到15微米的光谱范围,即中波和长波红外。当发射率已知时,该范围也适用于测量和描绘环境温度范围内的温度。然而,根据材料,这在0.012和0.98之间变化很大。温度分配可能相应地不精确,尽管这对于汽车应用并不重要。由于这个范围内的正常大气基本是透明的,只要距离只有几米,来自太阳和人造光源的横向照射几乎没有破坏性影响。在更远的距离上,空气的固有辐射会使结果变得虚假。
44.下面基于优选实施例参考附图更详细地解释本发明。所示的每个特征可以单独或组合地代表本发明的一方面。不同示例性实施例的特征可以在各示例性实施例之间转移。
附图说明
45.在附图中:
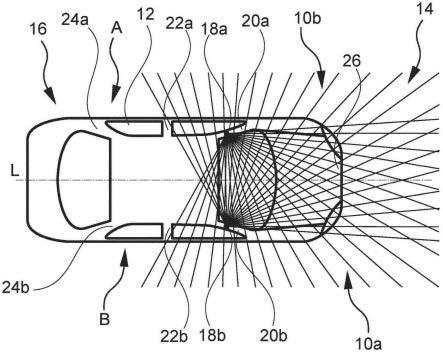
46.图1示出了根据本发明第一实施例的具有布置在相应a柱上的两个传感器单元的车辆的示意性俯视图,具有两个相交的车辆检测场;
47.图2示出了根据本发明第二实施例的具有布置在相应a柱上的两个传感器单元的车辆的示意性俯视图,具有两个相交的车辆检测场;
48.图3示出了根据本发明第三实施例的具有布置在相应a柱上的两个传感器单元的车辆的示意性俯视图,具有两个相交的车辆检测场;以及
49.图4示出了根据本发明的优选实施例的流程图。
具体实施方式
50.图4示出了用于通过或借助于第一传感器单元18a在一个或多个车辆检测场10a、10b中检测物体的方法的象征性应用,车辆检测场10a、10b包括车辆16的内部12和外部区域14。该方法具有以下步骤:
51.步骤100:用第一传感器单元18a检测第一车辆检测场10a的外部区域14中的物体作为第一检测数据,并且用第一传感器单元18a检测第一车辆检测场10a的内部12中的物体;
52.步骤200:用计算单元或计算系统处理第一和第二检测数据;以及可能
53.步骤300:通过驾驶辅助系统基于(处理后的)第一和第二检测数据提供(安全相关的)驾驶辅助功能。
54.也可以存在两个、特别是结构相同的传感器单元,从而也可以利用或借助于第二传感器单元18b检测第二检测场中的物体,该第二检测场包括车辆的内部和外部区域。在这种情况下,步骤100还包括:利用第二传感器单元18b检测第二车辆检测场10b的外部区域14中的物体作为第一检测数据,以及利用第二传感器单元18b检测第二车辆检测场10b的内部12中的物体。
55.根据图1、2和3,两个车辆检测场10a、10b中的物体由具有第一车辆检测场10a的第一传感器单元18a和具有第二车辆检测场10b的第二传感器单元18b检测为第一和第二检测数据100。传感器单元18a、18b在此彼此相对地布置在车辆16的两个相同类型的柱上,具体地说是a柱20a、20b上。两个传感器单元18a、18b优选是摄像机。
56.原则上,适用于一个传感器单元18a、18b的所有特征也适用于一个或多个另外的、优选所有的传感器单元。
57.在这种情况下,两个传感器单元18a、18b都布置在车辆16的内部12中,使得内部12的检测(尤其是乘员检测)和外部区域14的检测(优选是盲点检测)通过相应的传感器单元18a、18b进行。前排乘客侧的传感器单元18b尤其将驾驶员侧及其外部区域检测为第一车辆侧a。驾驶员侧的传感器单元18a优选将前排乘客侧及其外部区域检测为第二车辆侧b。
58.此外,两个传感器单元18a、18b布置在车辆16的内部12中的相应a柱20a、20b上。
59.至少一个传感器单元18a、18b布置成使得其车辆检测场10a、10b从第一车辆侧a,特别是从车辆16的相应a柱20a、20b,至少穿过内部12,横向于车辆16的纵向轴线l,延伸到相对的第二车辆侧b,优选延伸到车辆16的第二a柱20a、20b,进入外部区域14。
60.如图1、2和3中象征性示出,每个传感器单元18a、18b优选地具有车辆检测场10a、10b,其从相应的传感器单元18a、18b开始,具有至少110度的水平检测锥。具体而言,图1、2和3所示的车辆检测场10a、10b具有(约)120度的水平检测锥。
61.图1、2和3在车辆检测场10a、10b的分布方面有所不同。
62.根据根据图1的本发明的第一优选实施例,两个传感器单元18a、18b布置成使得它们每个都具有车辆检测场10a、10b,其水平检测锥至少从第一车辆侧a(传感器单元18a、18b也布置在其上)的前角(这里例如从前灯)延伸到车辆16长度的至少三分之一(这里,例如到b柱22a、22b)。车辆16的长度是沿着纵向轴线l的长度。
63.相比之下,根据根据图2的本发明的第二优选实施例,两个传感器单元18a、18b布置成使得它们每个都具有车辆检测场10a、10b,其水平检测锥至少从相对的第二车辆侧b(即在与侧a相对的侧b,传感器单元18a也布置在其上)的前角(这里例如从前灯)延伸至车辆长度的至少三分之二(这里,例如至c柱24a、24b)。
64.此外,根据根据图3的本发明的第三优选实施例,两个传感器单元18a、18b布置成使得它们每个都具有车辆检测场10a、10b,其水平检测锥至少从车辆16的前侧或发动机罩前部26的设置在车辆16的纵向轴线l上的中心区域延伸到相对的第二车辆侧的车辆长度的至少一半(这里,例如到b柱22a、22b和c柱24a、24b之间)。水平检测锥特别优选延伸到也能检测到相应盲点的程度。
65.图1、2和3示出了车辆检测场10a、10b的重叠。这种重叠可以存在于车辆16的内部12或外部区域14中。这种双重检测的冗余提高了检测数据的质量,使它们更精确,并能够进行更可靠的检测,结果是可以由此采取安全增强措施。
66.附图标记列表
67.10a第一传感器单元的第一车辆检测场
68.10b第二传感器单元的第二车辆检测场
69.12 车辆内部
70.14 车辆外部区域
71.16 车辆
72.18 第一传感器单元
73.18 第二传感器单元
74.20a车辆的第一a柱
75.20b车辆的第二a柱
76.22a车辆的第一b柱
77.22b车辆的第二b柱
78.24a车辆的第一c柱
79.24b车辆的第二c柱
80.26车辆前部或发动机罩前部
81.100用至少一个相应的传感器单元检测至少一个车辆检测场作为检测数据
82.200用计算系统处理检测数据
83.300通过驾驶辅助系统基于检测数据设置安全相关的车辆行为
84.l车辆的纵向轴线
85.a车辆的第一侧
86.b车辆的第二侧
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1