机器人、充电站和包括机器人、充电站的机器人充电系统的制作方法
本公开涉及一种机器人、充电站以及包括机器人、充电站的机器人充电系统,并且更具体地,涉及一种在充电站处对接的机器人、对对接的机器人充电的充电站以及包括机器人、充电站的机器人充电系统。
背景技术:
1、近年来,在诸如工业现场、医疗、空间、家务等领域中,为了通过光检测和测距(lidar)传感器检测周围的对象并且代表人类进行工作,开发了各种机器人。
2、这样的机器人可基于从充电站供应的电力来执行工作,然后当机器人的充电容量变得小于预定容量时,在充电站处对接以被充电。
3、为此,机器人可识别充电站的指示器以在充电站处对接,并且通过基于充电站的指示器控制机器人的驱动方向来在充电站处对接。
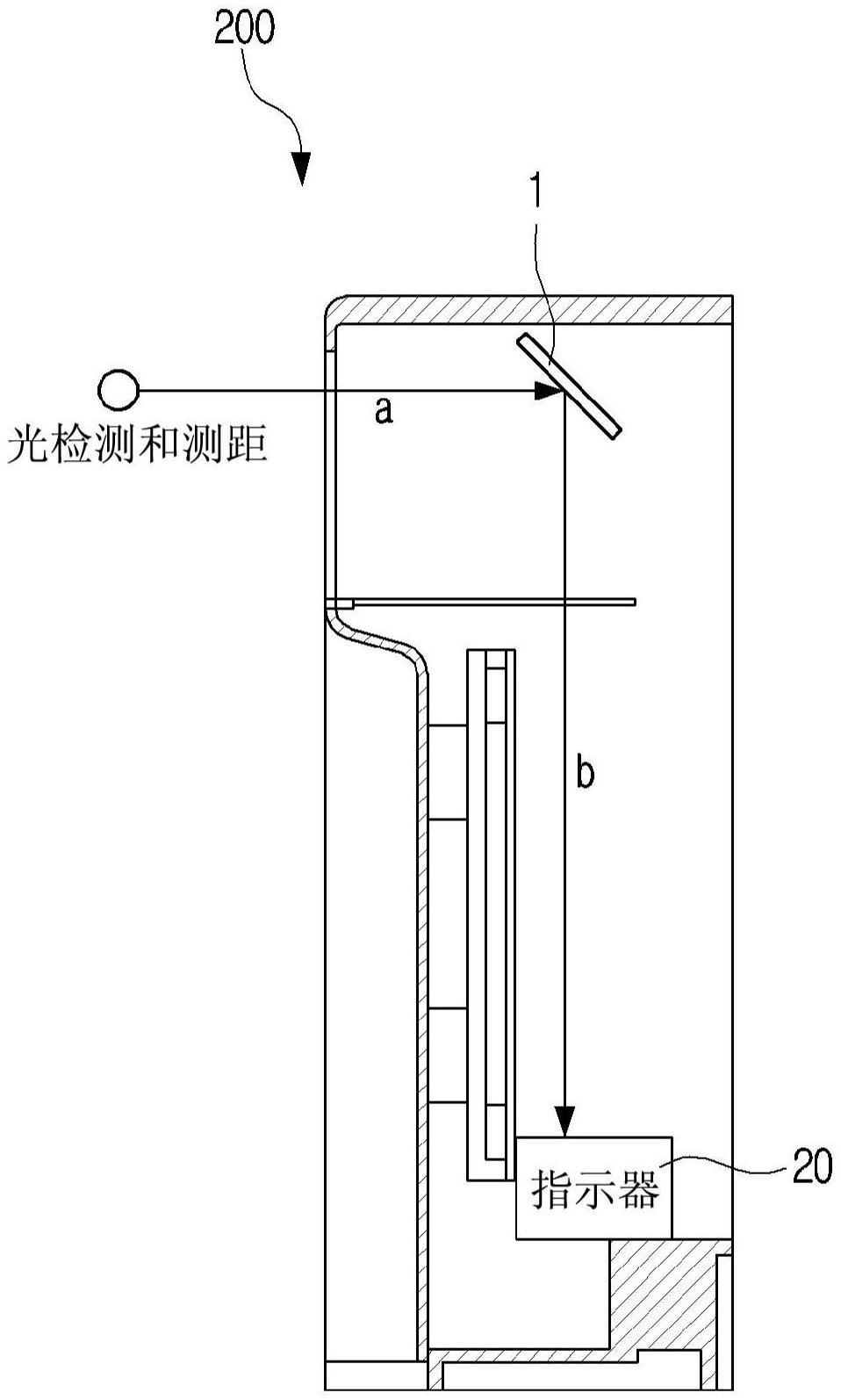
4、同时,光检测和测距传感器可能无法准确地识别位于最小识别距离(例如,265mm)或更小距离处的对象,因此,除了光检测和测距传感器之外,传统的机器人还可包括用于识别充电站的指示器的相机、超声波传感器、飞行时间(tof)传感器等。
5、然而,通常,相机和tof传感器可能是昂贵的,并且超声波传感器不能执行除了识别指示器之外的特殊功能。因此,需要提供一种可通过光检测和测距传感器识别充电站的指示器而无需单独传感器以识别指示器的机器人、一种使这种类型的识别成为可能的充电站以及一种包括该机器人和该充电站的机器人充电系统。
技术实现思路
1、技术问题
2、本发明提供了一种可通过光检测和测距传感器识别充电站的指示器的机器人、包括用于这种识别的至少一个反射器的充电站以及包括该机器人和该充电站的机器人充电系统。
3、技术方案
4、根据本公开的实施例,充电站包括:至少一个指示器;至少一个反射器,被配置为将从外部接收的光反射到所述至少一个指示器;接口,被配置为对接外部装置;以及处理器,被配置为当检测到所述外部装置在接口处对接时,通过所述接口向对接的外部装置供电。
5、这里,所述至少一个反射器可以以一定角度被安装在所述充电站的主体内部,以将从外部接收的光反射到指示器。
6、此外,所述至少一个反射器可包括第一反射器和第二反射器,第一反射器可位于所述充电站的主体内部的第一区域中,并且将从外部接收的光反射到第二反射器,并且第二反射器可位于充电站的主体内部的第二区域中,并且将由第一反射器反射的光反射到指示器。
7、另外,所述至少一个反射器可包括第三反射器和第四反射器,第三反射器可位于所述充电站的主体内部的第三区域中,并且将从外部接收的光反射到所述指示器,并且第四反射器可位于所述充电站的主体内部的第四区域中,并且将从外部接收的光反射到所述指示器。
8、此外,所述至少一个反射器可具有弯曲形状。
9、另外,所述至少一个指示器可包括位于所述充电站的主体内部的第一区域中的第一指示器和位于所述充电站的主体内部的第二区域中的第二指示器,并且第一区域和第二区域可以是彼此相对的区域,并且可接收由所述至少一个反射器反射的光。
10、根据本公开的实施例,机器人包括:驱动单元;传感器;以及处理器,被配置为当由所述传感器的发光单元照射到充电站的光由所述充电站的至少一个指示器反射,然后由所述传感器的光接收单元接收时,基于反射光图案执行用于将所述机器人在所述充电站处对接的对准,并且在执行所述对准之后控制用于所述机器人的所述驱动单元以在所述充电站处对接,其中,由所述传感器的发光单元照射的光由所述充电站的至少一个反射器反射,然后由所述指示器反射。
11、所述处理器可执行用于将反射光图案与预先存储的图案匹配的对准。
12、所述处理器可通过控制连接到所述驱动单元的马达以移动所述机器人,或者控制连接到所述机器人主体的马达以旋转所述机器人,执行用于将反射光图案与预先存储的图案匹配的对准。
13、所述充电站可包括位于所述充电站内部的第一区域中的第一反射器和位于所述充电站内部的第二区域中的第二反射器,照射的光可由第一反射器反射到第二反射器,并且反射到第二反射器的光可由第二反射器反射到所述指示器。
14、所述充电站可包括位于所述充电站内部的第三区域中的第三反射器和位于所述充电站内部的第四区域中的第四反射器,并且所述处理器可通过所述传感器的光接收单元接收由第三反射器反射然后由所述指示器反射的第一图案的光和由第四反射器反射然后由所述指示器反射的第二图案的光,并且执行用于使第一图案的光和第二图案的光彼此对称的对准。
15、所述反射光可具有弯曲形状,并且所述处理器可基于反射光图案和关于基于所述机器人相对于所述充电站的相对位置而不同的多个图案的信息,确定与反射光图案对应的所述机器人的位置,并且基于所述机器人的位置来执行用于使反射光图案与预先存储的图案匹配的对准。
16、所述充电站还可包括位于所述充电站内部的第一区域中的第一指示器和位于所述充电站内部的第二区域中的第二指示器,并且所述处理器可通过所述传感器的光接收单元,接收由第一指示器反射的第一图案的光和由第二指示器反射的第二图案的光,并且执行用于使第一图案的光和第二图案的光彼此对称的对准。
17、根据本公开的实施例,一种用于控制机器人的方法包括:当由传感器的发光单元照射到充电站的光由所述充电站的至少一个指示器反射,然后由所述传感器的光接收单元接收时,基于反射光图案执行用于将所述机器人在所述充电站处对接的对准,并且在执行所述对准之后控制用于所述机器人的驱动单元以在所述充电站处对接。这里,由所述传感器的发光单元照射的光可由所述充电站的所述至少一个反射器反射,然后由所述指示器反射。
18、执行对准可包括将反射光图案与预先存储的图案匹配。
19、执行对准可包括通过控制连接到驱动单元的马达以移动所述机器人,或者控制连接到所述机器人的主体的马达以旋转所述机器人使反射光图案与预先存储的图案匹配。
20、所述充电站可包括位于所述充电站内部的第一区域中的第一反射器和位于所述充电站内部的第二区域中的第二反射器,照射的光可由第一反射器反射到第二反射器,并且反射到第二反射器的光可由第二反射器反射到所述指示器。
21、所述充电站可包括位于所述充电站内部的第三区域中的第三反射器和位于所述充电站内部的第四区域中的第四反射器,并且执行对准可包括:通过所述传感器的光接收单元接收由第三反射器反射然后由所述指示器反射的第一图案的光和由第四反射器反射然后由所述指示器反射的第二图案的光,并且使第一图案的光和第二图案的光彼此对称。
22、所述反射光可具有弯曲形状,并且执行对准可包括基于反射光图案和关于基于机器人相对于所述充电站的相对位置而不同的多个图案的信息,确定与反射光图案对应的所述机器人的位置,并且基于所述机器人的位置将反射光图案与预先存储的图案匹配。
23、所述充电站还可包括位于所述充电站内部的第一区域中的第一指示器和位于所述充电站内部的第二区域中的第二指示器。
24、由处理器执行对准可包括:通过所述传感器的光接收单元,接收由第一指示器反射的第一图案的光和由第二指示器反射的第二图案的光,并且使第一图案的光和第二图案的光彼此对称。
25、根据本公开的实施例,一种机器人充电系统包括:充电站,包括用于将从外部接收的光反射到至少一个指示器的至少一个反射器;以及机器人,用于当由传感器的发光单元照射到所述充电站的光由所述充电站的至少一个反射器反射,然后由所述至少一个指示器反射,然后由所述传感器的光接收单元接收时,基于反射光图案执行用于将机器人在充电站处对接的对准,并且在执行所述对准之后在所述充电站处对接。
26、有益效果
27、根据如上所述的本公开的各种实施例,即使当光检测和测距传感器和充电站的指示器物理地位于光检测和测距传感器的最小识别距离处时,机器人也可通过充电站的反射器识别充电站的指示器。
28、另外,以这种方式,可通过反射器确保光检测和测距传感器的最小识别距离,因此充电站可被制造成具有薄且紧凑的设计,从而减少充电站占据的空间或充电站的重量。
- 还没有人留言评论。精彩留言会获得点赞!