一种评估智能驾驶系统能力的方法与流程
1.本发明涉及车辆自动驾驶领域,特别是涉及一种评估智能驾驶系统能力的方法。
背景技术:
2.当前国内外各大汽车主机厂已经开展了自动驾驶预研及路试工作。目前上市车型基本都有支持l4级自动驾驶能力的硬件配套,但限于法规等要求,只能支持l2+级别辅助驾驶,所以会产生辅助的效果。此外,目前车辆的自动驾驶系统一旦有部件失效,车辆不会基于场景对自动驾驶的硬件进行系统性的能力评估,即使不需要此失效部件的场景,自动驾驶功能也因此无法使用,使装备大量传感器的智能汽车的智能系统变成摆设。
3.即部分传感器失效时,系统仍有能力支持辅助驾驶功能,可以称为系统处于失效时可继续操作的状态(fail-operational state),从而使系统可以在部件失效时,尽可能多的完成ddt(dynamic driving task,动态驾驶任务),提升系统的可用性和驾驶员可操作性,增加用户智能驾驶体验。
4.目前没有一种方法可以评估自动驾驶硬件的能力,评估某部件失效对哪一类场景的影响,能摸清自车能否支持l2+辅助驾驶的边界,系统地分析不同场景下需要的最基本的部件。
技术实现要素:
5.本发明的一个目的是要提供一种评估智能驾驶系统能力的方法,使得车辆基于不同场景对失效部件进行系统性的能力评估,使车辆的智能驾驶系统继续保持可支持的工作,让智能驾驶系统能继续辅助用户进行驾驶。
6.本发明一个进一步的目的是要使得自动驾驶能够进行冗余分析,成本分析,使自动驾驶系统性价比更高。
7.本发明另一个进一步的目的是要使得不同失效对应能达到的不同功能表现,使不同级别的驾驶辅助可以无缝衔接。
8.特别地,本发明提供了一种智能驾驶系统的控制方法,其特征在于,所述控制方法包括以下步骤:
9.获取自车当前所处的驾驶场景;
10.判断当前驾驶场景下智能驾驶系统的执行系统的运行状态;
11.判断当前驾驶场景下智能驾驶系统的所有传感器的运行状态,按照以下公式一计算获得当前驾驶场景下智能驾驶系统的得分s,
12.s=n-q*a-e-y
ꢀꢀ
公式一
13.其中n表示当前驾驶场景下所述智能驾驶系统的满分数,q表示当前驾驶场景下传感器得分的动态系数,a表示当前驾驶场景下所有传感器的总分数,e表示当前驾驶场景下智能驾驶系统的执行系统的得分,y表示当前驾驶场景下其他影响因素的总分数;
14.根据所述智能驾驶系统的所述智能驾驶系统的得分s确定所述车辆待执行的驾驶
策略。
15.进一步地,所述根据所述智能驾驶系统的所述得分确定所述车辆待执行的驾驶策略,包括如下步骤:
16.根据所述智能驾驶系统的所述得分s确定所述智能驾驶系统的用于表示失效程度的性能等级;
17.根据所述性能等级确定所述车辆待执行的驾驶策略。
18.进一步地,所述根据所述智能驾驶系统的所述得分确定所述智能驾驶系统的性能等级的步骤之前,还包括如下步骤:查询存储有所述智能驾驶系统的得分与性能等级一一对应的第一映射关系表;
19.可选地,所述根据所述性能等级确定所述车辆待执行的驾驶策略的步骤之前,还包括如下步骤:查询存储有所述智能驾驶系统的性能等级与待执行的驾驶策略一一对应的第二映射关系表。
20.进一步地,所述当前驾驶场景下的传感器的动态系数q通过以下公式二确定,
21.q=f(a,b,c)
ꢀꢀ
公式二
22.其中,b表示与当前驾驶场景下所有传感器对应的所有冗余传感器的总分数,c代表当前驾驶场景下所有传感器中含有执行mrm策略执行传感器的总分数。
23.进一步地,所述当前驾驶场景下智能驾驶系统的执行系统的得分e,通过以下公式三计算执行系统的得分e:
24.e=am+qs*asꢀꢀ
公式三
25.其中,am表示执行系统的所有执行器的总分数,qs表示冗余执行器的动态权重值,as表示所有执行器的冗余执行器的总分数。
26.进一步地,所述总分数a的获取方法包括如下步骤:
27.根据当前驾驶场景下智能驾驶系统的所有传感器中每个传感器是否具有冗余传感器,以及该冗余传感器的冗余度来确定该传感器的分数值;
28.将各个传感器的分数值相加,得到所述总分数a。
29.进一步地,所述根据当前驾驶场景下所有传感器中每个传感器是否有冗余传感器,以及该冗余传感器的冗余度来确定该传感器的分数值,包括如下步骤:
30.在确定当前驾驶场景下某个传感器具有冗余传感器时,确定该冗余传感器的冗余度;
31.根据所述冗余度确定该传感器的权重值;
32.将权重值乘以最大分数值,得到该传感器的分数值;
33.可选地,所述根据当前驾驶场景下所有传感器中每个传感器是否有冗余传感器,以及该冗余传感器的冗余度来确定该传感器的分数值,还包括如下步骤:
34.在确定当前驾驶场景下某个传感器不具有冗余传感器时,确定该传感器的分数值为所述最大分数值。
35.进一步地,所述总分数b的获取方法包括如下步骤:
36.在当前驾驶场景下的故障传感器具有冗余传感器时,确定所述冗余传感器在作为所述故障传感器的冗余传感器之前和之后的分数值,并对该两个分数值进行加和,得到该冗余传感器的总得分;
37.将所有冗余传感器的总得分相加得到总分数b。
38.进一步地,所述总分数c的获取方法包括如下步骤:
39.判断当前驾驶场景下智能驾驶系统中每个传感器是否为执行mrm(minimal risk maneuver,最小风险操作)策略的执行传感器,确定执行mrm策略的每个执行传感器的分数,对所有执行传感器的分数进行加和,得到执行mrm策略的所有执行传感器的总分数。
40.进一步地,所述其他影响分数y根据以下公式四确定:
41.y=w+tor
ꢀꢀ
公式四
42.其中,w表示驾驶系统的提醒能力的得分,tor表示车辆接管能力分数。
43.进一步地,所述驾驶系统的提醒能力的得分w通过不同执行器完成,根据整车电子电气架构,分析计算的得出系统评分。
44.进一步地,所述车辆接管能力得分tor通过对转向、油门踏板、制动踏板、方向盘按钮、脱手检测分析计算系统评分。
45.本发明通过对不同驾驶场景下的所有传感器进行分析,通过判断每个传感器对该驾驶场景下的智能驾驶的影响,从而判断该驾驶场景下的智能驾驶是否满足驾驶需求,进而执行不同的驾驶策略,通过对每个驾驶场景进行独立的分析判断,使得车辆不会因为某一个驾驶场景下的传感器失效而使得整车的自动驾驶功能无法使用,从而致使装备大量传感器的智能汽车的智能系统变成了摆设。
46.进一步地,本发明根据智能驾驶系统的得分确定智能驾驶系统的用于表示失效程度的性能等级;根据性能等级确定车辆待执行的驾驶策略,使得自动驾驶能够进行冗余分析,成本分析,使自动驾驶系统性价比更高,进一步,使得不同失效对应能达到的不同功能表现,使不同级别的驾驶辅助可以无缝衔接。
47.根据下文结合附图对本发明具体实施例的详细描述,本领域技术人员将会更加明了本发明的上述以及其他目的、优点和特征。
附图说明
48.后文将参照附图以示例性而非限制性的方式详细描述本发明的一些具体实施例。附图中相同的附图标记标示了相同或类似的部件或部分。本领域技术人员应该理解,这些附图未必是按比例绘制的。附图中:
49.图1是根据本发明一个实施例的流程示意图;
50.图2是根据本发明一个实施例的驾驶等级示意图。
具体实施方式
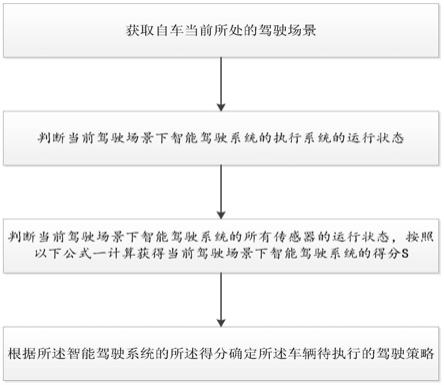
51.图1是根据本发明一个实施例的流程示意图。在一个实施例中,如图1所示,一种智能驾驶系统的控制方法主要包括以下步骤:
52.s1、获取自车当前所处的驾驶场景;
53.s2、判断当前驾驶场景下智能驾驶系统的执行系统的运行状态;
54.s3、判断当前驾驶场景下智能驾驶系统的所有传感器的运行状态,按照以下公式一计算获得当前驾驶场景下智能驾驶系统的得分s;
55.s4、根据所述智能驾驶系统的所述智能驾驶系统的得分s确定所述车辆待执行的
驾驶策略。
56.s=n-q*a-e-y
ꢀꢀ
公式一
57.其中n表示当前驾驶场景下所述智能驾驶系统的满分数,q表示当前驾驶场景下智能驾驶系统传感器得分的动态系数,a表示当前驾驶场景下所有传感器的总分数,e表示当前驾驶场景下智能驾驶系统的执行系统的得分,y表示当前驾驶场景下其他影响因素的总分数。
58.本实施例中,通过获取当前驾驶场景下智能驾驶系统的满分数n,和当前驾驶场景下智能驾驶系统的执行系统的运行状态,判断该执行系统是否能够执行当前场景下智能驾驶系统的智能驾驶工作,并对该执行系统进行计算评分,得出分数e,进一步的对当前驾驶场景下智能驾驶系统的每个传感器进行分析,判断每个传感器对当前驾驶场景的影响程度,进而获取智能驾驶系统的所有传感器的总分a;再根据当前驾驶场景下智能驾驶系统传感器得分的动态系数q计算出当前驾驶场景下智能驾驶系统的得分s。
59.通过对得分s进行区段的划分,就能清楚的知道当前智能驾驶系统的整体运行状态,进而判断该驾驶场景是否符合满足驾驶需求。根据不同的区间段对应实施不同的驾驶策略,这样就从而改变了现有技术中一旦有部件失效,车辆不会基于场景进行系统性的能力评估,即使不需要此失效部件的场景,自动驾驶功能也因此无法使用,使装备大量传感器的智能汽车的智能系统变成摆设等问题,提高了车辆的智能化,提升了驾驶人员的驾驶体验。
60.进一步地,由于是对智能驾驶场景进行实时检测和计算,能有效地保证了数据的连续性和稳定性,通过对不同驾驶场景的实时监控,在驾驶场景切换时,能保证上一个驾驶场景和当前驾驶场景都是相互独立的,当前驾驶场景和下一个驾驶场景也是独立的,即若当前驾驶场景下的智能驾驶系统中的某个传感器出现故障后,只是影响到当前驾驶场景下的智能驾驶系统的运行,在其他用不到该故障传感器,或该故障传感器只是辅助/备用传感器时,并不影响其他场景下智能驾驶系统的正常运行,有效地解决了目前现有技术中并不能针对车辆的智能驾驶系统进行场景区分,一旦有部件失效,那么整车的智能驾驶都被限制使用,使得用户的体验差的问题。
61.此外,由于每个驾驶场景下智能驾驶系统的运行情况不同,所需传感器的要求不同,因此智能驾驶系统传感器得分的动态系数q也会产生变化,动态系数q不仅会根据驾驶场景发生变化,而且还会根据该驾驶场景下不同传感器的影响发生动态变化,这样使得在计算当前场景下智能驾驶系统的分数s就会更加的精准,更加具有参考性。
62.进一步地,通过不同驾驶场景下对传感器都进行系统化分析,能有效地保证每个驾驶场景的独立性,不会因某个驾驶场景下的某个传感器损坏而导致该车辆所以的驾驶场景均禁用的现象,提升了智能驾驶的可用性。
63.在进一步的一个实施例中,如图2所示,根据智能驾驶系统的得分s确定车辆待执行的驾驶策略,其中不同的得分表示车辆处于不同的失效程度的性能等级,然后根据每个等级所对应的驾驶策略来控制车辆按照预设的驾驶策略进行驾驶。其中当得分位于90-100之间时,表示当前场景下的智能驾驶系统处于第四等级,即车辆能够正常驾驶,此时执行正常驾驶策略;当得分位于70-90之间时,表示当前场景下的智能驾驶系统处于第三等级,即车辆处于一般性失效状态,此时提醒驾驶员对车辆的智能驾驶系统进行降级处理,仍能自
动完成智能驾驶任务;当得分位于50-70之间时,表示当前场景下的智能驾驶系统处于第二等级,即车辆处于中等性失效状态,此时,智能驾驶系统已无法自主完成车辆的智能驾驶任务,需要驾驶员介入操控;当得分低于50时,表示当前场景下的智能驾驶系统处于第一等级,即车辆处于严重性失效状态,此时智能驾驶系统已无法完成智能驾驶任务,需要驾驶员全面接管车辆,若驾驶员未在规定的时间内对车辆进行接管,则车辆自动执行mrm策略,使车辆进入到mrc(minimal risk condition,最小风险条件)状态,从而保证车辆和驾乘人员的安全。
64.本实施例中,通过对当前驾驶场景下的智能驾驶系统进行分析和计算评分,能够精准的确定当前驾驶场景下车辆的智能驾驶系统的情况,并根据相对应的得分情况来执行不同的驾驶策略,有效的提升了驾驶系统的使用效率。避免了某一个传感器损坏而导致的整车的智能驾驶系统都无法工作的情况,提升了智能驾驶的可用性。
65.在一个实施例中,公式一中的当前驾驶场景下智能驾驶系统传感器得分的动态系数q通过以下公式二确定,
66.q=f(a,b,c)
ꢀꢀ
公式二
67.其中,b表示与当前驾驶场景下所有传感器对应的所有冗余传感器的总分数,c代表当前驾驶场景下所有传感器中含有执行mrm策略执行传感器的总分数。
68.通过获取当前驾驶场景下所有传感器的总分数a;当前驾驶场景下所有传感器对应的所有冗余传感器的总分数b;当前驾驶场景下所有传感器中含有执行mrm策略执行传感器的总分数c;来确定当前驾驶场景下智能驾驶系统传感器得分的动态系数q。
69.本实施例中,根据当前驾驶场景下所有传感器中每个传感器是否有冗余传感器,以及该冗余传感器的冗余度来确定该传感器的分数值;将各个传感器的分数值相加,得到所述总分数a。其中,在确定当前驾驶场景下某个传感器具有冗余传感器时,确定该冗余传感器的冗余度;根据冗余度确定该传感器的权重值;将权重值乘以最大分数值,得到该传感器的分数值;当若前驾驶场景下某个传感器不具有冗余传感器时,则确定该传感器的分数值为最大分数值,其可替代程度最低。
70.进一步地,在当前驾驶场景下的故障传感器具有冗余传感器时,确定冗余传感器在作为故障传感器的冗余传感器之前和之后的分数值,并对该两个分数值进行加和,得到该冗余传感器的总得分;将所有冗余传感器的总得分相加得到总分数b。
71.更进一步地,判断当前驾驶场景下智能驾驶系统中每个传感器是否为执行mrm策略的执行传感器,确定执行mrm策略的每个执行传感器的分数,对所有执行传感器的分数进行加和,得到执行mrm策略的所有执行传感器的总分数c。
72.通过获取当前驾驶场景下所有传感器的总分数a;当前驾驶场景下所有传感器对应的所有冗余传感器的总分数b;当前驾驶场景下所有传感器中含有执行mrm策略执行传感器的总分数c;来确定当前驾驶场景下智能驾驶系统传感器得分的动态系数q,从而根据动态系数q来分析计算当前驾驶场景下的智能驾驶系统的得分情况。
73.具体过程为:首先分析该驾驶场景下智能驾驶系统的所有主传感器的工作状态,例如城市场景路口安全路径停车需要哪些必用的传感器,是否有冗余传感器可替代。若不可替代,此传感器失效使系统无法支持此场景。如唯一的能识别红绿灯的传感器a失效,则路口场景下不能识别红绿灯,所以传感器a占很大比重的分数,系统根据分数大小直接评为
严重性失效。因为自动驾驶车辆无法支持安全通过路口。再如在城市和高速场景下,某传感器b的失效并不影响自动驾驶,所以此处对于系统无影响,传感器b失效不扣分。
74.其他传感器的影响因为有毫米波雷达、激光雷达、摄像头的数据融合,单一传感器的失效影响由识别类kpi和该传感器识别结果在算法中的比重决定系统性能下降的程度,减分不等;另外如在某些比重大的传感器c正常时,冗余的传感器d失效分数变得更少,比如在高速场景下,传感器c可以用传感器d、传感器e代替,若传感器d、e正常,传感器c在一些场景下所占分数变低,否则此传感器c占更多的分数。根据分数系统提示驾驶员功能降级使用等,提升驾驶员的监控参与度。
75.本实施例中,通过在不同场景的下对该场景下的智能驾驶系统进行分析,判断每个传感器对车辆当前驾驶场景的影响,对每个传感器根据其对当前驾驶场景的影响程度来对该场景下所有的传感器进行评分,若传感器的影响程度越高,则该主传感器的所占的权重较高,则该传感器的得分越高。进一步地,对该场景下的每个传感器进行判断,判断每个传感器是否有备份的冗余传感器,当主传感器失效时,冗余传感器是否能接替主传感器继续完成当前驾驶场景下的驾驶任务,若当前场景下该主传感器的可替代程度越高,则该主传感器的所占的权重较低,则所得评分较低。
76.详细来说,例如车辆在高速驾驶场景下智能驾驶时,设该场景下智能驾驶系统的主传感器为第一主传感器、第二主传感器和第三主传感器,若每个主传感器都没有冗余传感器,则该第一主传感器、第二主传感器和第三主传感器的比重就会很高,若其中某一个主传感器失效时,则无法完成高速驾驶场景的相关驾驶任务,测试就会提醒驾驶人员取消智能驾驶进行人工驾驶,若驾驶人员无反应,则智能驾驶系统直接操控车辆实施mrm策略,从而保证车辆和驾乘人员的安全。
77.若第一主传感器、第二主传感器和第三主传感器分别有第一冗余传感器、第二冗余传感器和第三冗余传感器,此时第一主传感器的比重为60%,第二主传感器的比重为20%,第三主传感器的比重为10%,则相对应的冗余传感器的影响对该驾驶场景下的驾驶系统影响较小,如第一冗余传感器的比重为6%,第二冗余传感器的比重为2%,第三冗余传感器的比重为2%。在第一主传感器、第二主传感器和第三主传感器中的一个或多个主传感器失效时,该失效主传感器的比重为0%,而相对应的冗余传感器的比重就会上升,第一冗余传感器从比重6%上升到60%,或第二冗余传感器从比重2%上升到20%,或第三冗余传感器从比重2%上升到10%,若第一冗余传感器、第二冗余传感器、第三冗余传感器还各自有相对应的第一子冗余传感器、第二子冗余传感器、第三子冗余传感器,则其上升的比重也会收到相对应的影响。
78.此外,由于第一主传感器或第二主传感器或第三主传感器的损坏,对系统稍有影响,无法发挥系统的完美功能,但不妨碍系统的正常使用,此时,只需对系统进行降级使用即可,进一步的,当第一冗余传感器或第二冗余传感器或第三冗余传感器也损坏时,则此时第一子冗余传感器或第二子冗余传感器或第三子冗余传感器工作,此时第一主传感器和第一冗余传感器的权重均为0%,此时冗余传感器3的权重值为100%,而此时系统的次一级功能也被限制,则将该系统进一步的降级使用即可。此外,当第一子冗余传感器损坏时,该功能就无法完成相对应的工作,只能执行mrm策略。
79.需要指出的是,第一主传感器、第二主传感器和第三主传感器相互之间可为冗余
传感器,或第一主传感器、第二主传感器和第三主传感器各自有自己的冗余传感器,其冗余传感器由车辆的实际驾驶场景所决定,并不局限于某一个固定的冗余传感器。
80.上述举例只为更加清楚详细的解释本发明的相关内容,由于车辆驾驶场景和传感器的数量繁多,在实际的生产和设计时,搭配组合的效果很多,因此不能尽举所有例子。
81.通过对该驾驶场景下的每个传感器进行上述的分析,综合得出每个传感器在当前驾驶场景下的得分,当该驾驶场景下某个传感器出现故障时,通过传感器来对该驾驶场景进行分析计算,判断该驾驶场景下自动驾驶系统的得分情况,并根据得分所对应的驾驶等级,来采用不同的驾驶策略,从而改变了现有技术中一旦有部件失效,车辆不会基于场景进行系统性的能力评估,即使不需要此失效部件的场景,自动驾驶功能也因此无法使用,使装备大量传感器的智能汽车的智能系统变成摆设等问题,提高了车辆的智能化,提升了驾驶人员的驾驶体验。
82.进一步地,当驾驶场景发生改变时,则改变后的驾驶场景所需的传感器与之前的驾驶场景的传感器有所区别,则需对改变后的驾驶场景进行重新分析评分,对该驾驶场景下所有传感器进行评分和分析,判断该驾驶场景是否满足智能驾驶的需求,并根据该驾驶场景的得分来确定相对应的驾驶策略。通过不同驾驶场景下对传感器都进行系统化分析,能有效地保证每个驾驶场景的独立性,不会因某个驾驶场景下的某个传感器损坏而导致该车辆所以的驾驶场景均禁用的现象,提升了智能驾驶的可用性。
83.在一个实施例中,为了能够清楚的判断当前驾驶场景下能驾驶系统的执行系统的运行状态,并计算所述执行系统的得分e,主要通过以下公式三计算执行系统的得分e:
84.e=am+qs*asꢀꢀ
公式三
85.其中,am表示执行系统的所有执行器的总分数,qs表示冗余执行器的动态权重值,as表示所有执行器的冗余传感器的总分数。
86.本实施例中,通过分析自动驾驶系统主、辅控制器、主、备用电源、通讯线路等失效、转向、刹车等执行器失效对系统的影响。通过不同场景下对功能的影响来做动态评分e,由于执行系统失效会导致车辆无法无法正确执行自动驾驶系统指令,且一套执行系统失效后,另一套执行系统无法形成备份,再次失效会导致车辆直接失控,所以一旦执行系统出现故障,系统需执行mrm策略到mrc状态。
87.进一步地,冗余传感器的动态权重值qs主要和执行器的冗余传感器相关,具体地,qs=f(as),即当执行系统中所述执行器都是正常运行时,冗余传感器的得分影响较小,此时qs的权重值较小,一旦某个主执行器损坏,该传感器的冗余传感器进行替代工作时,此时qs的权重值就会上升,若该冗余传感器还有其他的冗余传感器,那么该冗余传感器的权重值上升幅度较小,若该冗余传感器为该主主传感器的唯一冗余传感器,则其所占权重就很大:
88.例如执行车辆前进的功能的传感器有主传感器h和冗余传感器i,则主传感器h的权重为80%,该冗余传感器i的权重为20%,若该主传感器h损坏,则冗余传感器i代替主传感器h工作时,则该主传感器h的权重为0%,由于该冗余传感器i没有其他的冗余传感器,则该冗余传感器i的权重为100%。
89.若该冗余传感器i还有一个冗余传感器j,则当车辆正常运行时,主传感器h的权重为70%,冗余传感器i的权重为20%,冗余传感器j的权重为10%,当主传感器h损坏时,则该主传感器h的权重为0%,冗余传感器i的权重为70%,该冗余传感器j的权重为30%;此时,
由于主传感器h损坏,对系统稍有影响,无法发挥系统的完美功能,但不妨碍系统的正常使用,此时,只需对系统进行降级使用即可,进一步的,当冗余传感器i也损坏时,则此时冗余传感器j工作,此时主传感器h和冗余传感器i的权重均为0%,此时冗余传感器j的权重值为100%,而此时系统的次一级功能也被限制,则将该系统进一步的降级使用即可。此外,当冗余传感器j损坏时,该功能就无法完成相对应的工作,只能执行mrm策略。此外,一旦会影响任意一种mrm策略实施的传感器失效,导致再无冗余mrm策略操作时,立即执行mrm策略操作,直到驾驶员接管。若主要执行系统与备用执行系统性能有差异,则主执行系统失效,立即执行mrm策略。
90.通过上述例子来表示冗余传感器的动态权重值qs与执行器和其冗余传感器关系,并不只限定为上述关系。
91.在一个实施例中,影响车辆智能驾驶还包括其他影响因素,其他影响因素形成总得分y,其中其他影响因素主要包括整车驾驶系统对驾驶员的提醒能力和驾驶员对车辆的接管能力,当车辆目前所处的驾驶场景发生失效时,分析车辆对驾驶人员的提醒能力和驾驶人员对车辆的接管能力,即车辆目前所处的驾驶场景发生失效时,整车自动驾驶系统通过多种提示方式提醒驾驶员,包括但不限于提示音、语音、抬头显示屏、仪表显示、中控大屏显示、安全带振动、刹车点刹等。由于不同的提醒方式所使用的执行机构不同,因此,根据整车电子电气架构对提醒系统进行评分。其中,能清晰直观表达系统故障原因的提示的分数所占权重更多,例如中控大屏发送错误提示,能清楚告知驾驶员故障的原因,所以占比大,得分高;安全带振动和点刹只能给提供驾驶员注意力提醒的能力,占比少得分低,进而综合分析整车驾驶系统的提醒能力,从而形成得分w。
92.进一步地,在智能驾驶系统失效后,需要驾驶员对车辆进行接管,通过转向、油门踏板、制动踏板、方向盘按钮等控制单元的检测来分析驾驶员对车辆的接管能力,形成得分tor。
93.通过将驾驶系统的提醒能力的得分w和驾驶员对车辆的接管能力的得分tor相加得到其他影响因素形成得分y。如公式四所示:
94.y=w+tor
ꢀꢀ
公式四
95.其中,y表示其他影响因素总得分,w表示驾驶系统的提醒能力的得分,tor表示车辆接管能力分数。
96.本实施例中,通过对车辆的整车驾驶系统的提醒能力和驾驶员对车辆的接管能力进行分析计算得分,能更加精准的反馈出当前驾驶场景下的智能驾驶的能力。
97.至此,本领域技术人员应认识到,虽然本文已详尽示出和描述了本发明的多个示例性实施例,但是,在不脱离本发明精神和范围的情况下,仍可根据本发明公开的内容直接确定或推导出符合本发明原理的许多其他变型或修改。因此,本发明的范围应被理解和认定为覆盖了所有这些其他变型或修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1