一种混合动力汽车扭矩分层控制方法、系统及存储介质与流程
1.本发明属于混合动力汽车动力控制技术领域,本发明涉及一种混合动力汽车扭矩分层控制方法、系统及存储介质。
背景技术:
2.混合动力汽车的扭矩控制需要解决三个相互影响的问题:动力性、经济性和能量管理。并在解决这三个问题的同时兼顾整车的扭矩安全。
3.动力性的表现是整车的扭矩输出是否跟随驾驶员的油门踏板;经济性的表现是发动机是否工作在最优工作点上;能量管理是电池包的电量是否维持在可用区间内部。
4.由于发动机的扭矩输出需要经过喷油
→
点火
→
燃烧等过程,因此发动机的扭矩输出相比于电机来说很慢,不能很好的跟随驾驶员的油门踏板。发动机的工作点是否在最优区间不仅取决于驾驶员是如何踩下油门踏板的,还取决于变速箱的换挡规律。而发动机在最优点的扭矩通常比发动机本身的能力小很多,如果驾驶员激烈的踩下油门,发动机在最优点的扭矩就无法满足驾驶员的需求,则发动机很容易脱离最优区间,导致整车经济性很差,因此动力性会影响经济性。当驾驶员的油门踏板比较激烈或者整车的负载较大,为了兼顾整车动力性则电机会去助力,进而导致电池包soc下降,因此动力性也会影响电池包的能量管理。
5.对于油电混合动力汽车,整车的动力源不仅有发动机还有电机。对于发动机来说,其扭矩能力被当前的转速、进气量、温度等影响;电机的扭矩能力不仅取决于自身的状态,比如温度、转速、故障状态等,还和电池包的功率输出能力有关;电池包的功率能力不仅与自身的soc有关,还和环境温度等等因素有关;而整车的扭矩能力还和当前的变速箱速比有关。可见,整车的扭矩能力是分层级的:零部件级
→
系统级
→
整车级。除此之外,外界的扭矩需求不仅会来自于驾驶员的扭矩需求,还可能来自于其他,比如巡航扭矩和蠕行扭矩,这些扭矩需求可能是整车级的也可能是系统级的;对于外界的扭矩干涉也可能是不同级别的,比如来自整车稳定性控制的扭矩干涉是整车级别的,来自变速箱的扭矩干涉是系统级别的。因此,整车的扭矩安全应分层管理。
6.申请号2019102994118公开了一种混合动力新能源汽车整车扭矩需求逻辑算法,由车速到差速器得到的计算需求扭矩,可快速处理的最小扭矩和处理的最大扭矩,方便提醒驾驶员踩刹车和不踩刹车。其没有考虑整车各个级别的扭矩安全限制和电池包的能量管理需求。
7.申请号2020106171733公开了车辆扭矩分配方法、车辆以及存储介质,车辆包括前电机、后电机和发动机,所述车辆扭矩分配方法包括:获取油门踏板开度、车速和当前soc值;根据油门踏板开度和车速获得驾驶员需求扭矩;检测到发动机启动;根据当前soc值、车速、发动机经济扭矩和nvh限制扭矩将驾驶员需求扭矩分配给前电机、后电机和发动机。其同样没有考虑整车各个级别的扭矩安全限制和电池包的能量管理需求。
技术实现要素:
8.本发明的目的在于提供一种混合动力汽车扭矩分层控制方法及系统,将整车的扭矩需求和扭矩能力都进行分层,将整车的扭矩需求划分层级为:整车级(即轮边)
→
系统级(即变速箱系统的输入和输出)
→
零部件级(即发动机和电机的目标扭矩),将整车的扭矩能力划分层级为:零部件级
→
系统级
→
整车级,考虑整车各个级别的扭矩安全限制和电池包的能量管理需求,可以兼顾整车动力性经济性、电池包的能量管理和整车的扭矩安全。
9.实现本发明目的的技术解决方案为:
10.一种混合动力汽车扭矩分层控制方法,将整车的扭矩需求划分层级为:整车级、系统级、零部件级,包括以下步骤:
11.s01:计算得到驾驶员的需求扭矩;
12.s02:计算得到驾驶员轮边需求扭矩;
13.s03:计算得到驾驶员变速箱输出轴需求扭矩;
14.s04:根据变速箱输入轴扭矩限制计算得到驾驶员变速箱输入轴需求扭矩;
15.s05:根据发动机的最优扭矩将计算得到的驾驶员变速箱输入轴需求扭矩进行扭矩分配,计算得到发动机的目标扭矩和电机的目标扭矩。
16.优选的技术方案中,所述步骤s01中计算得到驾驶员的需求扭矩的方法包括:
17.s11:根据驾驶员油门踏板深度及制动踏板深度,计算得到仲裁后的油门踏板深度accpedpctact
arb
;
18.s12:当accpedpctact
arb
≥accpedpct,则计算驾驶员需求扭矩 driverdemtq=driverdemtq
acc
;driverdemtq
acc
为油门踏板扭矩;
19.s13:当accpedpctact
arb
《accpedpct,则计算驾驶员需求扭矩 driverdemtq=driverdemtq
brk
;driverdemtq
brk
为制动踏板扭矩;
20.其中,accpedpct是标定量。
21.优选的技术方案中,所述油门踏板扭矩的计算方法包括:
22.s121:获取当前的变速箱挡位gear、当前挡位速比ratio和当前主减速比ratio
final
;
23.s122:根据挡位数设计多张map图,在不同挡位下触发不同的油门踏板map,所述油门踏板map是一个三维表,其中x轴是油门踏板深度、y轴是当前变速箱输入轴转速,z轴是驾驶员对变速箱输入轴的需求扭矩;
24.s123:基于仲裁后的油门踏板深度accpedpctact
arb
和变速箱输入轴转速transinputspd通过查表的方式计算驾驶员对变速箱输入轴的需求扭矩transinputtq
dem
,即:
25.transinputtq
dem
=f(accpedpctact
arb
,transinputspd);
26.s124:计算驾驶员对变速箱输出轴的需求扭矩 transoutputtq
dem
=transinputtq
dem
*ratio;
27.s125:计算驾驶员的油门踏板扭矩driverdemtq
acc
=transoutputtq
dem
*ratio
final
。
28.优选的技术方案中,所述制动踏板扭矩的计算方法为:
29.s131:判断当前的驾驶模式,如果是纯电模式,则计算滑行能量回收扭矩regentq
coast
:
30.regentq
coast
=(engtqloss+coasttq)*ratio*ratio
final
31.s132:如果是混动模式,则计算滑行能量回收扭矩regentq
coast
:
32.regentq
coast
=coasttq*ratio*ratio
final
33.其中,engtqloss为发动机的扭矩损失,coasttq是实际在变速箱输入端的滑行制动能量回收扭矩;
34.s133:构建制动能量回收扭矩regentq
brake
与当前车速 vehiclespd及制动踏板深度brkpedpctact的映射关系;
35.s134:通过当前车速和制动踏板深度查表计算制动能量回收扭矩 regentq
brake
:
36.regentq
brake
=f(vehiclespd,brkpedpctact)
37.s135:计算驾驶员制动踏板扭矩driverdemtq
brk
:
38.driverdemtq
brk
=regentq
coast
+regentq
brake
。
39.优选的技术方案中,所述步骤s03计算得到驾驶员变速箱输出轴需求扭矩的方法包括:
40.s31:获取主减速比ratio
final
;
41.s32:计算未限制的驾驶员变速箱输出轴需求扭矩 transoutputdemtqunlim:
42.transoutputdemtqunlim=wheeldemtq/ratio
final
;
43.其中,wheeldemtq为驾驶员需求轮边扭矩;
44.s33:获取变速箱输出轴的最大扭矩能力transoutputtq
max
和变速箱输出轴的最小扭矩能力transoutputtq
min
;
45.s34:计算驾驶员变速箱输出轴需求扭矩transoutputdemtq= lim(transoutputtq
max
,transoutputtq
min
,transoutputdemtqunlim)
46.其中,output=lim(max,min,input)表示当输入input》max, max为上限值,则输出output=max,当输入input<min,min为下限值,则输出output=min,当min<input<max,则output=input。
47.优选的技术方案中,所述步骤s04中计算得到驾驶员变速箱输入轴需求扭矩的方法包括:
48.s41:获取当前的变速箱速比ratio;
49.s42:获取驾驶员变速箱输出轴需求扭矩transoutputdemtq;
50.s43:计算未限制的驾驶员变速箱输入轴需求扭矩 transinputdemtqunlim:
51.transinputdemtqunlim=transoutputdemtq/ratio
52.s44:获取变速箱输入轴的最大扭矩能力transinputtq
max
和最小扭矩能力transinputtq
min
;
53.s45:计算驾驶员的变速箱输入轴需求扭矩transinputdemtq= lim(transinputtq
max
,transinputtq
min
,transinputdemtqunlim) 。
54.优选的技术方案中,所述步骤s05中计算得到发动机的目标扭矩和电机的目标扭矩的方法包括:
55.s51:获取驾驶员变速箱输入轴需求扭矩transinputdemtq和能量管理扭矩egymtq;
56.s52:获取发动机的最优扭矩engopttq、实际的发动机最小扭矩能力engtqact
min
和
实际的发动机最大扭矩能力engtqact
max
;
57.s53:获取电机可用驱动扭矩motdischgtq
ava
和可用发电扭矩 motchgtq
ava
;
58.s54:计算未限制的发动机需求扭矩engdemtqunlim:
59.engdemtqunlim=transinputdemtq-egymtq
60.s55:计算限制后的发动机需求扭矩engdemtq:
61.engdemtq=lim(engopttq,engtqact
min
,engdemtqunlim)
62.s56:计算电机的需求扭矩motdemtq:
63.motdemtq=transinputdemtq-engdemtq
64.s57:计算电机的目标扭矩mottgttq:
65.mottgttq=lim(motdischgtq
ava
,motchgtq
ava
,motdemtq)
66.s58:计算发动机的工作点转移后新的发动机需求扭矩 engdemtqshift=engdemtq+(motdemtq-mottgttq)
67.s59:计算发动机目标扭矩 engtgttq=lim(engtqact
max
,engtqact
min
,engdemtqshift)。
68.优选的技术方案中,所述能量管理扭矩egymtq的计算方法包括:
69.s511:获取电池包当前soc battsocact,电池包的可用放电功率battdischgpower
ava
和可用充电功率battchgpower
ava
;
70.s512:根据目标soc battsoctgt和battsocact的差值δ查表计算未被限制的电池包的能量管理功率egympowerunlim;
71.s513:判断当前的驾驶模式,若当前是混动模式,计算电池包的能量管理功率egympower:
72.egympower
73.=lim(battdischgpower
ava
,battchgpower
ava
,egympowerunlim)
74.若当前是纯电模式,计算电池包的能量管理功率egympower:
75.egympower=0
76.s514:获取当前电机的实际转速motspd
act
,计算电机转速motspd:
77.motspd=lim(motspd
max
,motspd
min
,motspd
act
)
78.其中,电机转速最大值motspd
max
和电机转速最小值motspd
min
是标定值;
79.s515:计算能量管理扭矩egymtq:
80.egymtq=egympower*9550/motspd。
81.本发明还公开了一种计算机存储介质,其上存储有计算机程序,所述计算机程序被执行时实现上述的混合动力汽车扭矩分层控制方法。
82.本发明又公开了一种混合动力汽车扭矩分层控制系统,包括:
83.驾驶员需求扭矩计算模块,将整车的扭矩需求划分层级为:整车级、系统级、零部件级,计算得到驾驶员的需求扭矩;
84.驾驶员轮边需求扭矩计算模块,计算得到驾驶员轮边需求扭矩;
85.驾驶员变速箱输出轴需求扭矩计算模块,计算得到驾驶员变速箱输出轴需求扭矩;
86.驾驶员变速箱输入轴需求扭矩计算模块,根据变速箱输入轴扭矩限制计算得到驾
驶员变速箱输入轴需求扭矩;
87.扭矩分配模块,根据发动机的最优扭矩将计算得到的驾驶员变速箱输入轴需求扭矩进行扭矩分配,计算得到发动机的目标扭矩和电机的目标扭矩。
88.本发明与现有技术相比,其显著优点为:
89.(1)将整车的扭矩需求和扭矩能力都进行分层,将整车的扭矩需求划分层级为:整车级(即轮边)
→
系统级(即变速箱系统的输入和输出)
→
零部件级(即发动机和电机的目标扭矩),将整车的扭矩能力划分层级为:零部件级
→
系统级
→
整车级,考虑整车各个级别的扭矩安全限制和电池包的能量管理需求,对混合动力汽车的整车扭矩进行分层控制,可以兼顾整车动力性经济性、电池包的能量管理和整车的扭矩安全。
90.(2)便于策略的移植开发:按照本方法进行扭矩管理可以不用考虑当前的混动架构,可以直接先把p0\p1\p2\p3\p4\ps部分都开发出来,然后基于具体的车型做匹配,比如你的目标车型是p2,那你可以把p2的部分使能、其他的部分不使能。你也不用考虑变速箱,因为速比只是一个标定量。
91.(3)便于策略的扩展:采用本方法可以在不同的层级引入目标干涉,可以应对不同的车型和不同的配置,不需要更改或者重新开发任何策略逻辑,只需要标定即可。
附图说明
92.图1为较佳实施例的混合动力汽车动力架构示意图;
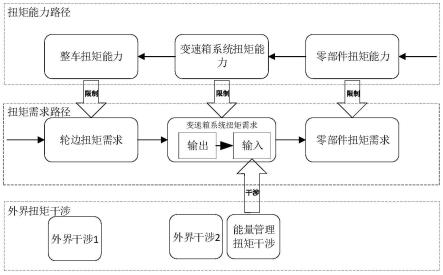
93.图2为实施例的混合动力汽车扭矩分层控制的原理图;
94.图3为实施例的混合动力汽车扭矩分层控制方法的流程图;
95.图4为较佳实施例的混合动力汽车扭矩分层控制方法的流程图;
96.图5为较佳实施例的发动机的最优功率曲线;
97.图6为实施例的混合动力汽车扭矩分层控制系统的原理框图。
具体实施方式
98.本发明的原理是:一种单电机油电混合动力汽车的整车扭矩分层控制方法。该汽车具有纯电模式(ev模式)和混动模式(phev) 两种驾驶模式。该混合动力汽车动力架构如图1所示。
99.本发明的驾驶员需求扭矩控制方法是指:从驾驶员踩下油门踏板开始
→
扭矩仲裁
→
扭矩限制
→
变速箱输入轴需求扭矩分配到发动机 (计算发动机目标扭矩)和电机(计算电机目标扭矩)这一过程的方法,并在这一过程中考虑整车各个级别的扭矩安全限制和电池包的能量管理需求。
100.如图2所示,将整车的扭矩需求和扭矩能力都进行分层,将整车的扭矩需求划分层级为:整车级(即轮边)
→
系统级(即变速箱系统的输入和输出)
→
零部件级(即发动机和电机的目标扭矩),将整车的扭矩能力划分层级为:零部件级
→
系统级
→
整车级,考虑整车各个级别的扭矩安全限制和电池包的能量管理需求,对混合动力汽车的整车扭矩进行分层控制。可以在不同的层级引入目标干涉。
101.实施例1:
102.如图3所示,一种混合动力汽车扭矩分层控制方法,将整车的扭矩需求划分层级
为:整车级、系统级、零部件级,包括以下步骤:
103.s01:计算得到驾驶员的需求扭矩;
104.s02:计算得到驾驶员轮边需求扭矩;
105.s03:计算得到驾驶员变速箱输出轴需求扭矩;
106.s04:根据变速箱输入轴扭矩限制计算得到驾驶员变速箱输入轴需求扭矩;
107.s05:根据发动机的最优扭矩将计算得到的驾驶员变速箱输入轴需求扭矩进行扭矩分配,计算得到发动机的目标扭矩和电机的目标扭矩。
108.下面以一较佳的实施例为例进行说明,如图4所示,包括:
109.1,驾驶员的油门踏板深度信号和制动踏板深度信号输入到cpu 后经过油门踏板仲裁从而计算得到实际的油门踏板深度。
110.2,cpu根据实际的油门踏板深度计算得到驾驶员的油门踏板需求扭矩,这是驱动扭矩。
111.3,cpu根据当前的制动踏板深度计算得到驾驶员的制动踏板需求扭矩,这是制动扭矩。
112.4,无论是驱动扭矩还是制动扭矩,都是代表了驾驶员的需求,但驾驶员的需求不可能既是驱动的也是制动的,因此cpu对油门和制动踏板的需求扭矩进行仲裁,从而计算得到驾驶员的需求扭矩。
113.5,cpu根据轮边扭矩限制计算得到驾驶员轮边需求扭矩。轮边扭矩限制代表的是这辆车的动力总成所能提供的扭矩折算到车轮上的最大及最小扭矩能力。
114.6,cpu根据变速箱的状态和变速箱输出轴扭矩限制计算得到驾驶员变速箱输出轴需求扭矩。变速箱输出轴扭矩限制代表的是这辆车的动力总成所能提供的扭矩折算到变速箱输出轴上的最大、最小扭矩能力。
115.7,cpu根据变速箱输入轴扭矩限制和能量管理扭矩干涉计算得到驾驶员变速箱输入轴需求扭矩。变速箱输入轴扭矩限制代表的是这辆车的动力总成所能提供的扭矩折算到变速箱输入轴上的最大、最小扭矩能力。能量管理扭矩干涉代表的是由于电池包的soc变化而需要充放电进而对变速箱输入轴扭矩的干涉。
116.8,驾驶员输入轴需求扭矩经过扭矩分配即考虑发动机的最优扭矩和电机的助力,计算得到发动机的目标扭矩和电机的目标扭矩。
117.9,最终的发动机和电机的目标扭矩需要考虑自身的扭矩限制。发动机的扭矩限制代表的是当前发动机的扭矩能力限制。电机的扭矩限制代表的是电机当前的扭矩能力限制。
118.为了便于书写本发明说明,本文定义一种数值限制方法如下:
119.取上限值为max,取下限值为min,当输入input》max,则输出 output=max.当输入input<min,则输出output=min。当min< input<max,则output=input。
120.本文将该方法定义成:output=lim(max,min,input)。
121.下面详细描述该方法的实现方案:
122.1:计算发动机实际的最大扭矩能力和实际的最小扭矩能力
123.1.1:ems(发动机控制器)将发动机的最大扭矩能力engtq
max
和最小扭矩能力engtq
min
告知cpu。
124.1.2:cpu基于当前的驾驶模式计算发动机实际的最大扭矩能力 engtqact
max
和发动机实际的最小扭矩能力engtqact
min
。
125.如果当前是ev模式,则:
126.engtqact
max
=0
127.engtqact
min
=0
128.如果是phev模式,则:
129.engtqact
max
=engtq
max
130.engtqact
min
=engtq
min
。
131.2,计算电机的最大功率能力和最小功率能力
132.2.1,电机控制器将电机的最大扭矩能力mottq
max
和最小扭矩能力mottq
min
发给cpu;
133.2.2,电机控制器将电机实际转速motspd
act
给cpu,cpu计算电机转速motspd:
134.motspd=lim(motspd
max
,motspd
min
,motspd
act
)
135.其中,最大电机转速motspd
max
和最小电机转速motspd
min
是标定值。
136.2.3,cpu用电机转速和电机的扭矩能力计算电机最大功率能力 motpower
max
和最小功率能力motpower
min
。算法如下:
137.motpower
max
=motspd*mottq
max
/9550
138.motpower
min
=motspd*mottq
min
/9550。
139.3,计算电机可用驱动功率和可用发电功率
140.3.1,bms根据电池包当前soc和当前温度把电池包当前的可用放电功率battdischgpower
ava
和可用充电功率battchgpower
ava
告知cpu;
141.3.2,输入电机最大功率能力motpower
max
和最小功率能力 motpower
min
(来自2);
142.3.3,取电池包的可用放电功率battdischgpower
ava
与电机的最大功率能力motpower
max
当中的最小值作为电机的可用驱动功率 motdischgpower
ava
,即:
143.motdischgpower
ava
=min(battdischgpower
ava
,motpower
max
)
144.3.4,取电池包的可用充电功率battchgpower
ava
与电机的最小功率能力motpower
min
当中的最大值作为电机的可用发电功率 motchgpower
ava
,即:
145.motchgpower
ava
=max(battchgpower
ava
,motpower
min
)。
146.4,计算电机的可用驱动扭矩和可用发电扭矩
147.4.1,输入电机可用驱动功率motdischgpower
ava
、可用发电功率 motchgpower
ava
(来自3);
148.4.2,对当前电机的实际转速采用2.2的方法进行限制,输出电机转速motspd;
149.4.3,cpu计算当前电机可用驱动扭矩motdischgtq
ava
:
150.motdischgtq
ava
=motdischgpower
ava
*9550/motspd;
151.4.4,cpu计算当前电机可用发电扭矩motchgtq
ava
:
152.motchgtq
ava
=motchgpower
ava
*9550/motspd。
153.5,计算离合器的最大可用扭矩和最小可用扭矩
154.5.1,输入发动机实际的最大扭矩能力engtqact
max
和发动机实际的最小扭矩能力engtqact
min
(来自1);
155.5.2,离合器将其当前的离合器最大扭矩clutchtq
max
和当前的离合器最小扭矩clutchtq
min
告知给cpu;
156.5.3,cpu判断当前驾驶模式,当前若是phev模式,则cpu计算离合器最大可用扭矩clutchmaxtq
ava
和最小可用扭矩 clutchmintq
ava
:
157.clutchmaxtq
ava
=min(engtqact
max
,clutchtq
max
)
158.clutchmintq
ava
=min(engtqact
min
,clutchtq
min
)
159.当前若是ev模式,则cpu计算离合器最大可用扭矩 clutchmaxtq
ava
和最小可用扭矩clutchmintq
ava
:
160.clutchmaxtq
ava
=0
161.clutchmintq
ava
=0。
162.6,计算发动机的最优扭矩
163.6.1,cpu依据发动机的万有特性数据确定发动机的最优功率点数据。该数据表达的是发动机在不同功率点下的最优转速点engspdn和最优扭矩点engtqn,随着发动机功率的变大,最优转速和最优扭矩均成递增趋势,如图5所示。
164.6.2,cpu将最优转速和最优扭矩数据保存在cpu内部,该数据的形式是:横坐标表示发动机最优转速,纵坐标表示在最优转速下的发动机的最优扭矩,如下表。该数据表可以通过外部输入横坐标的具体值寻找纵坐标的数值。
[0165][0166]
6.3,输入当前发动机的实际转速engspd,cpu基于当前发动机转速并从6.2中查找当前发动机的最优可用扭矩engopttq
ava
= f(engspd)。
[0167]
6.4,当输入的转速正好落在横坐标的点上,则查找的最优可用扭矩就是对应的纵坐标,如果不在横坐标的点上,则纵坐标的值采用线性插值法查找。当输入的转速超过横坐标范围,则按照端点查找纵坐标数值。
[0168]
6.5,cpu判断当前驾驶模式,如果是ev模式,则计算发动机最优扭矩engopttq:
[0169]
engopttq=0
[0170]
如果是phev模式,则计算发动机最优扭矩engopttq:
[0171]
engopttq=engopttq
ava
。
[0172]
7,计算变速箱输入轴最大扭矩能力和最小扭矩能力
[0173]
7.1,输入电机可用驱动扭矩motdischgtq
ava
,可用发电扭矩 motchgtq
ava
(来自4);
[0174]
7.2,输入离合器最大可用扭矩clutchmaxtq
ava
(来自5),最小可用扭矩clutchmintq
ava
(来自5);
[0175]
7.3,cpu计算变速箱输入轴最大扭矩能力transinputtq
max
:
[0176]
transinputtq
max
=motdischgtq
ava
+clutchmaxtq
ava
;
[0177]
7.4,cpu计算变速箱输入轴最小扭矩能力transinputtq
min
:
[0178]
transinputtq
max
=motchgtq
ava
+clutchmintq
ava
。
[0179]
8,计算变速箱输出轴的最大扭矩能力和最小扭矩能力
[0180]
8.1,变速箱输入当前的挡位的速比ratio给cpu;
[0181]
8.2,输入变速箱输入轴最大扭矩能力transinputtq
max
(来自7),最小扭矩能力transinputtq
min
(来自7);
[0182]
8.3,cpu计算变速箱输出轴最大扭矩能力transoutputtq
max
:
[0183]
transoutputtq
max
=transinputtq
max
*ratio;
[0184]
8.4,cpu计算变速箱输出轴最小扭矩能力transoutputtq
min
:
[0185]
transoutputtq
min
=transinputtq
min
*ratio。
[0186]
9,计算车轮的最大扭矩能力和最小扭矩能力
[0187]
9.1,输入当前主减速器上的主减速比ratio
final
;
[0188]
9.2,输入变速箱输出轴最大扭矩能力transoutputtq
max
(来自8),和最小扭矩能力transoutputtq
min
(来自8);
[0189]
9.3,cpu计算轮边最大扭矩能力wheeltq
max
:
[0190]
wheeltq
max
=transoutputtq
max
*ratio
final
;
[0191]
9.4,cpu计算轮边最小扭矩能力wheeltq
min
[0192]
wheeltq
min
=transoutputtq
min
*ratio
final
。
[0193]
10,计算仲裁后的油门踏板深度
[0194]
10.1,输入驾驶员油门踏板深度accpedpctact给cpu。
[0195]
10.2,输入制动踏板深度brkpedpctact给cpu。
[0196]
10.3,cpu进行制动踏板仲裁,当brkpedpctact≥brkpedpct,则cpu计算仲裁后的油门踏板深度accpedpctact
arb
:
[0197]
accpedpctact
arb
=0
[0198]
当brkpedpctact《brkpedpct
[0199]
accpedpctact
arb
=accpedpctact
[0200]
其中,brkpedpct为设定的阈值,是标定值。
[0201]
11,计算驾驶员油门踏板扭矩
[0202]
11.1,将当前的电机实际转速motspd
act
输入给cpu,cpu计算变速箱输入轴转速transinputspd等于当前的电机实际转速,即:
[0203]
transinputspd=motspd
act
[0204]
11.2,输入仲裁后的油门踏板深度accpedpctact
arb
(来自10);
[0205]
11.3,变速箱输入当前的变速箱挡位gear、当前挡位速比ratio和当前主减速比ratio
final
;
[0206]
11.4,cpu根据挡位数设计多张map图,在不同挡位下触发不同的油门踏板map,如下表:
[0207][0208]
11.5,油门踏板map是一个三维表,如下表所示。
[0209][0210][0211]
其中x轴是油门踏板深度、y轴是当前变速箱输入轴转速,z轴是驾驶员对变速箱输入轴的需求扭矩。cpu基于当前挡位查找相对应的map。cpu基于仲裁后的油门踏板深度accpedpctact
arb
(来自 10)和变速箱输入轴转速transinputspd通过查表的方式计算驾驶员对变速箱输入轴的需求扭矩transinputtq
dem
:
[0212]
transinputtq
dem
=f(accpedpctact
arb
,transinputspd)
[0213]
与6.4一样,中间采用线性插值,超过两端采用端点值。
[0214]
11.6,cpu计算驾驶员对变速箱输出轴的需求扭矩 transoutputtq
dem
:
[0215]
transoutputtq
dem
=transinputtq
dem
*ratio;
[0216]
11.7,cpu计算驾驶员的油门踏板扭矩driverdemtq
acc
:
[0217]
driverdemtq
acc
=transoutputtq
dem
*ratio
final
。
[0218]
12,计算驾驶员制动踏板扭矩
[0219]
12.1,计算滑行能量回收扭矩regentq
coast
;
[0220]
12.1.1,输入当前的速比ratio和当前主减速比ratio
final
给cpu;
[0221]
12.1.2,cpu判断当前的驾驶模式,如果是ev模式,则计算滑行能量回收扭矩regentq
coast
:
[0222]
regentq
coast
=(engtqloss+coasttq)*ratio*ratio
final
[0223]
如果当前是phev模式,则计算滑行能量回收扭矩regentq
coast
:
[0224]
regentq
coast
=coasttq*ratio*ratio
final
;
[0225]
其中,engtqloss表示发动机的扭矩损失,用于ev模式下利用电机模拟发动机的反拖,这是一个标定量。coasttq是实际在变速箱输入端的滑行制动能量回收扭矩,这也是一个标定量。
[0226]
12.2,计算制动能量回收扭矩regentq
brake
;
[0227]
12.2.1,制动能量回收扭矩是个三维表如下表。
[0228][0229]
其中x轴是当前车速vehiclespd,y轴是制动踏板深度 brkpedpctact,z轴是当前制动能量回收扭矩。cpu通过输入的当前车速和制动踏板深度查表的方式计算制动能量回收扭矩 regentq
brake
:
[0230]
regentq
brake
=f(vehiclespd,brkpedpctact)
[0231]
与6.4一样,中间采用线性插值,超过两端采用端点值。
[0232]
12.3,cpu计算驾驶员制动踏板扭矩driverdemtq
brk
:
[0233]
driverdemtq
brk
=regentq
coast
+regentq
brake
。
[0234]
13,计算驾驶员需求扭矩
[0235]
13.1,输入仲裁后的驾驶员油门踏板深度accpedpctact
arb
(来自 10)。
[0236]
13.2,cpu判断仲裁后的驾驶员油门踏板深度accpedpctact
arb
,当accpedpctact
arb
≥accpedpct,则计算驾驶员需求扭矩 driverdemtq:
[0237]
driverdemtq=driverdemtq
acc
[0238]
当accpedpctact
arb
《accpedpct,则计算驾驶员需求扭矩 driverdemtq:
[0239]
driverdemtq=driverdemtq
brk
[0240]
其中,accpedpct是标定量。
[0241]
14,计算能量管理扭矩
[0242]
14.1,计算电池包的能量管理功率egympower;
[0243]
14.1.1,输入当前驾驶模式给cpu;
[0244]
14.1.2,输入电池包当前soc battsocact给cpu;
[0245]
14.1.3,输入电池包的可用放电功率battdischgpower
ava
(来自 3.1)和可用充电功率battchgpower
ava
(来自3.1);
[0246]
14.1.4,cpu设置目标soc battsoctgt,battsoctgt是一个标定量;
[0247]
14.1.5,cpu根据battsoctgt和battsocact的差值δ查表计算未被限制的电池包的能量管理功率egympowerunlim,如下表。
[0248]
δδ1δ2δ3···
δmδnegympowerunlimegympowerunlim1egympowerunlim2egympowerunlim3···
egympowerunlimmegympowerunlimn[0249]
与6.4一样,中间采用线性插值,超过两端采用端点值。
[0250]
14.1.6,cpu判断当前的驾驶模式,若当前是phev模式,计算电池包的能量管理功率egympower:
[0251]
egympower
[0252]
=lim(battdischgpower
ava
,battchgpower
ava
,egympowerunlim)
[0253]
若当前是ev模式,计算电池包的能量管理功率egympower:
[0254]
egympower=0
[0255]
14.2,计算能量管理扭矩egymtq;
[0256]
14.2.1,输入当前电机的实际转速motspd
act
和能量管理功率 egympower(来自14.1);
[0257]
14.2.2,cpu计算电机转速motspd:
[0258]
motspd=lim(motspd
max
,motspd
min
,motspd
act
)
[0259]
其中,motspd
max
和motspd
min
是标定值。
[0260]
14.2.3,计算能量管理扭矩egymtq:
[0261]
egymtq=egympower*9550/motspd。
[0262]
15,计算驾驶员的轮边需求扭矩
[0263]
15.1,输入驾驶员需求扭矩driverdemtq(来自13)、轮边最大扭矩能力wheeltq
max
(来自9.3)和最小扭矩能力wheeltq
min
(来 自9.4);
[0264]
15.2,cpu计算驾驶员的轮边需求扭矩wheeldemtq:
[0265]
wheeldemtq=lim(wheeltq
max
,wheeltq
min
,driverdemtq)。
[0266]
16,计算驾驶员的变速箱输出轴需求扭矩
[0267]
16.1,输入主减速比ratio
final
,输入驾驶员需求轮边扭矩 wheeldemtq(来自15);
[0268]
16.2,cpu计算未限制的驾驶员变速箱输出轴需求扭矩 transoutputdemtqunlim:
[0269]
transoutputdemtqunlim=wheeldemtq/ratio
final
;
[0270]
16.3,输入变速箱输出轴的最大扭矩能力transoutputtq
max
和变速箱输出轴的最小扭矩能力transoutputtq
min
(来自8);
[0271]
16.4,cpu计算驾驶员的变速箱输出轴需求扭矩 transoutputdemtq:
[0272]
transoutputdemtq=
[0273]
lim(transoutputtq
max
,transoutputtq
min
,transoutputdemtqunlim) 。
[0274]
17,计算驾驶员的变速箱输入轴需求扭矩
[0275]
17.1,输入当前的变速箱速比ratio;
[0276]
17.2,输入驾驶员的变速箱输出轴需求扭矩transoutputdemtq (来自16);
[0277]
17.3,cpu计算未限制的驾驶员的变速箱输入轴需求扭矩 transinputdemtqunlim:
[0278]
transinputdemtqunlim=transoutputdemtq/ratio;
[0279]
17.4,输入变速箱输入轴的最大扭矩能力transinputtq
max
和最小扭矩能力transinputtq
min
(来自7);
[0280]
17.5,cpu计算驾驶员的变速箱输入轴需求扭矩 transinputdemtq:
[0281]
transinputdemtq=
[0282]
lim(transinputtq
max
,transinputtq
min
,transinputdemtqunlim)。
[0283]
18,计算最终的发动机目标扭矩和电机目标扭矩
[0284]
18.1,输入驾驶员的变速箱输入轴需求扭矩transinputdemtq(来自17)和能量管
理扭矩egymtq(来自14);
[0285]
18.2,输入发动机的最优扭矩engopttq(来自6)、实际的发动机最小扭矩能力engtqact
min
和实际的发动机最大扭矩能力 engtqact
max
(来自1);
[0286]
18.3,输入电机可用驱动扭矩motdischgtq
ava
和可用发电扭矩 motchgtq
ava
(来自4);
[0287]
18.4,cpu计算未限制的发动机需求扭矩engdemtqunlim
[0288]
engdemtqunlim=transinputdemtq-egymtq
[0289]
这一步表示将驾驶员对变速箱输入轴的需求扭矩与能量管理扭矩之间的差值(驾驶员和电池包的扭矩需求总和)全部赋值到发动机的需求扭矩上。旨在若电池包需要放电(正值),则发动机的需求扭矩会减小,而电池包如果需要充电,则发动机的需求扭矩会增加。
[0290]
18.5,cpu计算限制后的发动机需求扭矩engdemtq:
[0291]
engdemtq=lim(engopttq,engtqact
min
,engdemtqunlim)
[0292]
这一步表示cpu要考虑发动机的经济性,即发动机最多能提供的扭矩是发动机的最优扭矩engopttq;
[0293]
18.6,计算电机的需求扭矩motdemtq:
[0294]
motdemtq=transinputdemtq-engdemtq
[0295]
这一步表示用电机去补偿发动机的扭矩不足,以满足驾驶员的扭矩需求,并将发动机设置在最优工作点上。
[0296]
18.7,计算电机的目标扭矩mottgttq:
[0297]
mottgttq=lim(motdischgtq
ava
,motchgtq
ava
,motdemtq);
[0298]
18.8,计算发动机的工作点转移。当驾驶员的需求扭矩过大,cpu 虽然设置发动机工作在最优点,利用电机去补偿发动机的扭矩不足,但如果电机的补偿扭矩超过了电机本身的能力,则cpu为了满足驾驶员的扭矩需求,必须让发动机脱离最优工作点,转移到新的工作点,即新的发动机需求扭矩engdemtqshift:
[0299]
engdemtqshift=engdemtq+(motdemtq-mottgttq)
[0300]
18.9,计算发动机目标扭矩engtgttq:
[0301]
engtgttq=lim(engtqact
max
,engtqact
min
,engdemtqshift)
[0302]
另一实施例中,本发明还公开了一种计算机存储介质,其上存储有计算机程序,
[0303]
所述计算机程序被执行时实现上述的混合动力汽车扭矩分层控制方法。
[0304]
又一实施例中,如图6所示,本发明又公开了一种混合动力汽车扭矩分层控制系统,包括:
[0305]
驾驶员需求扭矩计算模块10,将整车的扭矩需求划分层级为:整车级、系统级、零部件级,计算得到驾驶员的需求扭矩;
[0306]
驾驶员轮边需求扭矩计算模块20,计算得到驾驶员轮边需求扭矩;
[0307]
驾驶员变速箱输出轴需求扭矩计算模块30,计算得到驾驶员变速箱输出轴需求扭矩;
[0308]
驾驶员变速箱输入轴需求扭矩计算模块40,根据变速箱输入轴扭矩限制计算得到驾驶员变速箱输入轴需求扭矩;
[0309]
扭矩分配模块50,根据发动机的最优扭矩将计算得到的驾驶员变速箱输入轴需求扭矩进行扭矩分配,计算得到发动机的目标扭矩和电机的目标扭矩。
[0310]
具体的实现方法采用上述实施例提供的混合动力汽车扭矩分层控制方法,在此不再赘述。
[0311]
上述实施例为本发明优选地实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1