一种智能汽车的全过程碰撞安全控制系统及汽车的制作方法
1.本发明属于汽车安全控制技术领域,具体涉及一种智能汽车的全过程碰撞安全控制系统及汽车。
背景技术:
2.碰撞安全技术是在有限的时间和空间内通过车体结构、约束系统、行人保护装置等来吸收来自整车、车内乘员和行人的动能,以期避免或降低车内外人员在碰撞中受到的伤害。
3.传统的碰撞安全保护机构的控制系统仅靠3-5个外置加速度、压力传感器和安全气囊控制器内部的加速度传感器识别碰撞事故是否发生,感知能力的局限性导致安全气囊在部分实际道路交通事故中无法正常点爆;其次,碰撞安全控制系统开发的参考标准仅限定了有限的试验工况和标准体型及坐姿的假人,无法兼容多样化的驾乘人员类型以及智能驾驶环境下日益丰富的驾乘场景;再次,传统的碰撞安全控制系统仅在事故发生后的100ms内发挥作用,因此相应的执行机构必须满足极其严格的响应时间和能量释放要求;另外,瞬时、高能量的控制方案无法实现人机交互,使得驾乘人员在碰撞事故发生前无任何体验;最后,现有的汽车事件数据记录系统仅记录碰撞事故发生时车辆的相关数据,缺乏事故救援、售后维修及保险理赔所需的详细车体损伤和人员损伤信息。
技术实现要素:
4.本发明的目的是:旨在提供一种智能汽车的全过程碰撞安全控制系统及汽车,用来解决背景技术中指出的不足,通过本方案提供的全过程碰撞安全控制系统,能够为不同类型的驾乘人员,提供多种驾乘及事故场景下,贯穿碰撞前、碰撞时及碰撞后,全时域的安全保护。
5.为实现上述技术目的,本发明采用的技术方案如下:
6.一种智能汽车的全过程碰撞安全控制系统,包括基础模型模块、核心算法模块和分层决策模块,所述基础模型模块与核心算法模块连接,所述核心算法模块与分层决策模块连接;
7.所述基础模型模块用于获取汽车信息、周围环境信息和人员信息,并预测汽车、汽车周围车辆以及汽车内人员的潜在运动信息;
8.所述核心算法模块用于预测碰撞发生概率、碰撞时的碰撞构型、车体损伤情况和车内人员损伤情况;
9.所述分层决策模块用于根据核心算法模块的信息,评估当前行车危险程度以及碰撞时,汽车以及人员的损伤情况,实时计算并对保护系统发出控制指令。
10.进一步,所述基础模型模块包括动力学评估模型单元、数字人体模型单元和感知系统,所述动力学评估模型单元和数字人体模型单元连接,所述动力学评估模型单元和数字人体模型单元均与感知系统连接。
11.进一步,所述感知系统包括环境感知系统、车辆感知系统和人员探测系统;
12.所述环境感知系统和车辆感知系统均与动力学评估模型单元连接,用于融合环境感知系统及车辆感知系统获得的信息,预测车辆和周围交通车的潜在运动轨迹簇;
13.所述车辆感知系统和人员探测系统均与数字人体模型单元连接,用于融合人员监测系统获得的信息和车辆的潜在运动轨迹簇,预测车内人员的潜在运动状态。
14.进一步,所述核心算法模块包括碰撞概率预测单元、车体损伤预测单元和人员损伤预测单元,所述碰撞概率预测单元和车体损伤预测单元连接,所述车体损伤预测单元和人员损伤预测单元连接。
15.进一步,所述分层决策模块包括预碰撞决策单元、碰撞决策单元、事故救援决策单元和碰撞感知系统,所述预碰撞决策单元和碰撞决策单元连接,所述碰撞决策单元和事故救援决策单元连接,所述碰撞感知系统和基础模型模块以及核心算法模块连接。
16.进一步,所述预碰撞决策单元分别与碰撞概率预测单元、车体损伤预测单元以及人员损伤预测单元连接,用于根据碰撞概率预测信息、车体损伤预测信息和人员损伤预测信息,评估当前的行车危险程度,实时计算并发送保护系统各个部件的控制指令;
17.所述碰撞决策单元分别与碰撞概率预测单元、车体损伤预测单元以及人员损伤预测单元连接,用于根据感知系统信息、碰撞概率预测信息、车体损伤预测信息、人员损伤预测信息和碰撞感知系统信息,评估碰撞事故发生时的严重程度,实时计算并发送保护系统各个部件的控制指令;
18.所述事故救援决策单元分别与车体损伤预测单元以及人员损伤预测单元连接,用于根据更新后的车体损伤预测信息和人员损伤预测信息,实时计算并发送保护系统各个部件的控制指令。
19.进一步,所述保护系统包括预碰撞保护系统、碰撞保护系统和事故救援系统,所述预碰撞保护系统、碰撞保护系统和事故救援系统均与分层决策模块连接。
20.进一步,所述预碰撞保护系统、碰撞保护系统和事故救援系统均与分层决策模块can总线连接。
21.本发明还公开了一种汽车,包括车辆本体和安装在所述车辆本体中的权利要求1-9中任一项所述系统。
22.采用上述技术方案的发明,具有如下优点:
23.1、将安全保护系统的作用时间向碰撞发生临界点之前扩展,利用实时预测技术大幅度降低执行机构的响应时间和能量释放要求,为用户提供可感知的预碰撞安全保护,有效增强人机交互的效率和体验感;
24.2、将安全保护系统的作用时间向碰撞事故之后延伸,通过信息反馈和模型更新及时获得更精确、更丰富的车体损伤信息和人员损伤信息,方便4s店和保险公司主动为客户提供精准地售后和理赔服务,保证受伤人员可以第一时间得到最合适的救援和医疗服务;
25.3、融合环境感知系统、人员探测系统和碰撞感知系统获得的信息及核心算法单元的预测信息,能显著提高传统约束系统的点火控制精度,大范围扩充应用场景,为“高矮胖瘦”不同类型的驾乘人员提供个性化的安全保护。
附图说明
26.本发明可以通过附图给出的非限定性实施例进一步说明;
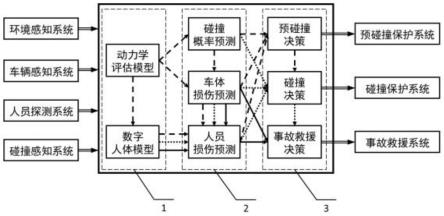
27.图1为本发明一种智能汽车的全过程碰撞安全控制系统中全过程碰撞安全控制系统示意图;
28.主要元件符号说明如下:
29.基础模型模块1、核心算法模块2、分层决策模块3。
具体实施方式
30.以下将结合附图和具体实施例对本发明进行详细说明,需要说明的是,在附图或说明书描述中,相似或相同的部分都使用相同的图号,附图中未绘示或描述的实现方式,为所属技术领域中普通技术人员所知的形式。另外,实施例中提到的方向用语,例如“上”、“下”、“顶”、“底”、“左”、“右”、“前”、“后”等,仅是参考附图的方向,并非用来限制本发明的保护范围。
31.本发明的一种智能汽车的全过程碰撞安全控制系统和汽车,所述的安全控制系统包括基础模型模块1、核心算法模块2和分层决策模块3,基础模型模块1与核心算法模块2信号连接,核心算法模块2与分层决策模块3信号连接,通过基础模型模块1将获取的汽车信息、周围环境信息和人员信息,以及预测到的汽车、汽车周围车辆以及汽车内人员的潜在运动信息传递给核心算法模块2,通过核心算法模块2预测碰撞发生概率、碰撞时的碰撞构型、车体损伤情况和车内人员损伤情况,并将这些信息传递给分层决策模块3,通过分层决策模块3分析核心算法模块2的信息,评估当前行车危险程度以及碰撞时,汽车以及人员的损伤情况,实时计算并对保护系统发出控制指令,能够为不同类型的驾乘人员,提供多种驾乘及事故场景下,碰撞前、碰撞时及碰撞后,全时域的安全保护,从而为驾乘人员提供更理想的保护。
32.为了更好的理解上述技术方案,下面将结合说明书附图图1和具体的实施方式对上述技术方案进行更详细的说明。
33.第一方面,本发明实施例提供的基础模型模块1包括动力学评估模型单元、数字人体模型单元和感知系统,动力学评估模型单元和数字人体模型单元信号连接,动力学评估模型单元和数字人体模型单元均与感知系统信号连接。
34.感知系统包括环境感知系统、车辆感知系统和人员探测系统;环境感知系统和车辆感知系统均与动力学评估模型单元can总线连接,用于融合环境感知系统及车辆感知系统获得的信息,并预测车辆和周围交通车的潜在运动轨迹簇。
35.本实施例中,动力学评估模型单元为三个自由度简化四轮车模型,三个自由度分别为横摆、纵向和侧向,用于获取并融合环境感知系统及车辆感知系统获得的信息、周围交通车运行状态信息和车辆本身运行状态信息,从而实时预测当前车辆和周围交通车的潜在运动轨迹簇。
36.其中,环境感知系统和车辆感知系统获得的信息,在一些实施例中,包括但不限于当前车辆所处的地理位置、海拔、车道线、是否存在目标物及目标物类型、周围交通车的车身尺寸与质量。需要说明的是,目标物一般是指人,目标物类型是指不同年龄、性别的人。在某一些方面,目标物也可以为动物或其他车辆。
37.在一些实施例中,交通车运行状态信息包括但不限于,周围交通车与当前车辆的相对距离、相对速度、相对加速度和航角度。
38.在一些实施例中,车辆本身运行状态信息包括但不限于,当前车辆的车速、纵向加速度和侧向加速度和横摆角速度。
39.环境感知系统包括但不限于摄像头和车载雷达,为实现对当前车辆周围的信息全面采集,摄像头和车载雷达可以设置有多个。车辆感知系统包括但不限于车速传感器和红外测距传感器,为实现对当前车辆信息的全面采集,车速传感器和红外测距传感器可以设置有多个。
40.车辆感知系统和人员探测系统均与数字人体模型单元连接,用于融合人员监测系统获得的信息和车辆的潜在运动轨迹簇,预测车内人员的潜在运动状态。
41.本实施例中,数字人体模型单元用于根据当前车辆运行状态信息、动力学评估模型单元的预测信息和人员探测系统获得信息,实时预测车内人员的潜在运动状态。
42.其中,人员探测系统获得的信息包括但不限于当前车辆驾乘人员的驾驶行为、乘坐位置、姿态、健康状况、性别、年龄和身材类型。人员探测系统包括但不限于微型摄像头、传感器和单片机。
43.第二方面,本发明提供的核心算法模块2包括碰撞概率预测单元、车体损伤预测单元和人员损伤预测单元,碰撞概率预测单元和车体损伤预测单元信号连接,车体损伤预测单元和人员损伤预测单元信号连接。
44.本实施例中,碰撞概率预测单元与动力学评估模型单元信号连接,根据动力学评估模型单元获得的当前车辆和周围交通车的潜在运动轨迹簇信息传输给碰撞概率预测单元,碰撞概率预测单元实时计算每条潜在轨迹上,既定时间后,当前车辆与周围交通车的相对位置,从而推导碰撞事故发生的概率及临界碰撞时的碰撞构型。
45.具体的,根据当前车辆与前车的相对速度、相对角度和相对加速度,从而计算出当前车辆与前车的碰撞时间和碰撞点位置。
46.本实施例中,车体损伤预测单元和环境感知系统、车辆感知系统以及碰撞概率预测单元信号连接,根据环境感知系统以及车辆感知系统,获得前车车身尺寸和质量信息,并与当前车辆对比,假设碰撞发生时的碰撞构型,再利用等效波形、集中参数模型或机器学习算法,计算假设性碰撞造成的潜在车体损伤严重程度。
47.在利用等效波形、集中参数模型或机器学习算法计算时,可根据当前车辆与前车的加速度、二者在该加速度下获得的力以及动能、势能,从而计算假设性碰撞造成的潜在车体损伤严重程度。
48.本实施例中,人员损伤预测单元和车体损伤预测单元以及数字人体模型单元信号连接,根据车体损伤预测单元获得的车体损伤严重程度和数字人体模型单元获得的车内人员的潜在运动状态,利用集中参数模型或机器学习算法,计算假设性碰撞造成的潜在人员损伤严重程度。
49.具体的,根据当前车辆与前车的加速度、当前车辆与前车的质量、当前车辆与前车在该加速度下的能量,利用集中参数模型或机器学习算法,计算假设性碰撞造成的对人员头部、颈部、胸部以及腿部造成的潜在伤害程度。
50.第三方面,本发明提供的分层决策模块3包括预碰撞决策单元、碰撞决策单元、事
故救援决策单元和碰撞感知系统,预碰撞决策单元和碰撞决策单元信号连接,碰撞决策单元和事故救援决策单元信号连接,碰撞感知系统和动力学评估模型单元、数字人体模型单元、碰撞概率预测单元、车体损伤预测单元和人员损伤预测单元信号连接。
51.保护系统包括预碰撞保护系统、碰撞保护系统和事故救援系统,预碰撞保护系统、碰撞保护系统和事故救援系统分别与预碰撞决策单元、碰撞决策单元、事故救援决策单元can总线连接。
52.本实施例中,预碰撞决策单元与碰撞概率预测单元、车体损伤预测单元和人员损伤预测单元信号连接,并与预碰撞保护系统can总线连接,预碰撞决策单元融合并分析碰撞概率预测信息、车体损伤预测信息和人员损伤预测信息,综合判断当前场景下的行驶危险程度,实时计算并发送预碰撞保护系统各个执行机构的控制指令。
53.在一些实施例中,预碰撞决策单元判断车辆即将进入或处于危险状态时,将根据车体损伤预测单元及人员损伤预测单元获得的危险程度信息,由预碰撞决策单元制定并发送控制指令到包括但不限于主动安全带、方向盘、声光装置以及电动座椅这些预碰撞保护系统的执行机构,改变预碰撞保护系统执行机构的提醒等级和形式,以提升用户感知和险态场景下的人机交互效率,从而达到险态场景警示功能,进而降低碰撞发生概率。
54.在一些实施例中,险态预警未解除且碰撞概率预测单元判断碰撞概率持续上升时,将根据车体损伤预测单元及人员损伤预测单元获得的危险程度信息,由预碰撞决策单元制定并发送预碰撞保护系统的执行机构进入准备状态的指令,例如主动安全带的驱动电机所需的启动时刻和卷收力,进行安全带预控收紧。例如预碰撞气囊进入点火准备阶段,方向盘、行人保护机构和电动座椅进行安全预控启动,从而达到动态危险支持功能,降低对当前车辆和驾乘人员的伤害。
55.在一些实施例中,当碰撞概率预测单元判断碰撞概率等于1,即当前场景下碰撞事故已进入不可避免阶段时,根据碰撞概率预测单元获得的假设性碰撞发生时的碰撞构型信息,由预碰撞决策单元制定并发送天窗关闭、折叠式方向盘收回、安全带回拉锁紧、可逆式行人保护抬升机构、侧面预碰撞气囊等的启动信号,根据人员损伤预测单元获得的假设性碰撞发生时的潜在人体姿态、位置和损伤严重程度,制定并发送智能安全座椅的横、纵向调整距离和靠背调整角度,将乘员调整至最佳保护姿态。
56.碰撞决策单元与碰撞概率预测单元、车体损伤预测单元、人员损伤预测单元和碰撞感知系统信号连接,并与碰撞保护系统can总线连接,碰撞决策单元根据碰撞感知系统获得的信息和人员损伤预测信息评估碰撞事故的严重程度,实时计算并发送碰撞保护系统各个执行机构的控制指令。
57.其中,碰撞感知系统获得的信息用于实时校验碰撞概率预测信息、车体损伤预测信息和人员损伤预测信息;碰撞概率预测信息用于实时校验环境感知系统获得的信息。
58.在一些实施例中,当碰撞感知系统探测到碰撞事故发生,将根据碰撞感知系统获得的实际的车体损伤严重程度、更新后的人员损伤预测信息和环境感知系统信息,由碰撞决策单元制定并发送碰撞保护系统执行机构的控制指令。
59.在一些实施例中,碰撞保护系统执行机构包括但不限于安全气囊,通过碰撞决策单元根据预碰撞决策单元信息和更新后的车体损伤严重程度、人员损伤预测信息和碰撞感知信息,发送各位置安全气囊最优的点火时刻以及点爆等级,从而为驾乘人员提供多元化
碰撞保护功能。
60.具体的,安全气囊点爆等级包括但不限于是否抑制点爆、单级点爆和双级点爆。
61.事故救援决策单元分别与车体损伤预测单元、人员损伤预测单元信号连接,并与事故救援系统can总线连接,事故救援决策单元根据车体损伤预测信息和人员损伤预测信息,实时计算并发送事故救援系统各个执行机构的控制指令。
62.其中,碰撞感知系统获得的,实际的车体损伤严重程度用于实时更新车体损伤预测信息,根据更新后的车体损伤信息和人员探测系统获得的人员状态信息,计算更加详细、丰富、准确的人员损伤预测信息,从而有利于后续的伤员救援。
63.在一些实施例中,事故救援系统执行机构包括但不限于救援平台、救援机构、家属人员、医院以及保险公司。在碰撞事故发生后,由事故救援决策单元向救援平台或机构及家属发送人员损伤信息,保证受伤人员可以第一时间得到最合适的救援和医疗服务。同时,由事故救援决策单元发送更新后的车体损伤信息给对应的保险公司,方便保险公司和4s店及时、主动向客户提供修复评估方案、推荐维修地点、派送备用车等售后服务,并提供自动定损、远程核保等理赔服务,从而为驾乘人员提供精准化救援服务。
64.需要特别说明的是:本方案中上述各模块组成的实施例中,逻辑关系如图1所示,图1中,长虚线表示碰撞前的信号,点虚线表示碰撞发生时的信号,单实线表示碰撞事故后的信号,双实线表示can总线。
65.在另一个实施例中,本发明还公开了一种汽车,包括车辆本体和安装在车辆本体中的全过程碰撞安全控制系统,安装了全过程碰撞安全控制系统的车辆,能够为为不同类型的驾乘人员,提供多种驾乘及事故场景下,贯穿碰撞前、碰撞时及碰撞后,全时域的安全保护。
66.以上对本发明提供的一种智能汽车的全过程碰撞安全控制系统及汽车进行了详细介绍。具体实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1