一种纯电动重型商用车能量回收分级控制方法和系统与流程
1.本发明涉及电动车技术领域,特别是一种纯电动重型商用车能量回收分级控制方法和系统。
背景技术:
2.纯电动重型商用车为适应多种工况,恒定的能量回收大小无法更好的满足节能驾驶的需求。尤其是在具有车辆重载长下坡工况时,具备能量回收分级控制的车辆可以回收更多的电能。但是随着能量回收的增加,对车辆后桥齿轮的冲击及磨损加剧,驱动电机可能因处于低效率运行而导致高温。
3.因此,提出一种纯电动重型商用车能量回收分级控制方法和系统,保障驱动桥和驱动电机使用寿命。
技术实现要素:
4.本发明的目的在于:提出一种纯电动重型商用车能量回收分级控制方法和系统,通过增加手柄操纵开关提升驾驶员操纵的便利性,同时根据驱动电机特性、驱动桥方向扭矩限值优化能量回收大小,确保车辆的平顺性、高效性,以及车辆驱动桥使用寿命。
5.本发明采用的技术方案如下:
6.本发明是一种纯电动重型商用车能量回收分级控制方法,包括以下步骤:
7.电动车车辆准状态,判断车辆行驶状态为滑行或者制动状态;
8.根据车辆行驶状态,确认能量回馈设定扭矩值;
9.判断能量回馈设定扭矩值是否超限,判断abs是否激活;
10.输出最终的能量回馈设定扭矩值。
11.进一步的,所述判断车辆行驶状态具体为:
12.判断车辆行驶状态为滑行,具体的,车速大于3km/h,且油门踏板是松开时,制动踏板未踩下,控制系统进行能量回收;
13.判断车辆行驶状态为制动,具体的,车速大于3km/h,且油门踏板是松开时,制动踏板踩下,控制系统进行能量回收。
14.进一步的,根据车辆行驶状态,确认能量回馈设定扭矩值,具体为:根据制动踏板是否踩下,确定能量回馈设定扭矩值,
15.当制动踏板未踩下,滑行能量回馈设定扭矩值=电机转速对应能量回收特性曲线*手柄操作开关对应能量回收系数*变速箱档位对应能量回收系数;
16.当制动踏板踩下,按照踏板深度计算的制动能量回馈设定扭矩值和滑行能量回馈设定扭矩值进行比较,获取最大的能量回馈设定扭矩值。
17.进一步的,所述确认能量回馈设定扭矩值是否超限,具体为:
18.判断能量回馈设定扭矩值是否超过电机允许回馈功率,如果超过限制,能量回馈设定扭矩值修改为电机允许最大值;
19.判断能量回馈设定扭矩值是否超过电池允许回馈功率,如果超过限制,能量回馈设定扭矩值修改为电池允许最大值。
20.进一步的,所述判断abs是否激活,即制动系统是否允许能量回馈,abs激活,制动系统不允许能量回馈,则能量回馈设定扭矩值修改为0n.m;
21.能量回馈设定扭矩值未超限,并且abs没有激活,即输出车辆为滑行状态或者制动状态的能量回馈设定扭矩值。
22.一种纯电动重型商用车能量回收分级控制系统,所述控制系统包括手柄操纵开关、整车控制器、电机控制器、驱动电机、amt变速箱、驱动桥和驱动轮,
23.手柄操纵开关控制车辆档位,每一个档位对应一个能量回收系数,amt变速箱有4档,每一个档位对应一个能量回收系数;
24.整车控制器采集手柄操纵开关档位信号,整车控制器识别到手柄操纵开关档位信号后按照上述控制方法,通过can通信发送控制命令至电机控制器,电机控制器执行控制命令,驱动电机转为发电状态,输出扭矩方向与电机运转方向相反,扭矩通过amt变速箱和驱动桥,传递到驱动轮,实现车辆能量回收。
25.进一步的,所述手柄操纵开关通过连接不同电阻控制档位,整车控制器采集手柄操纵开关电阻信号,即当电阻为r0时,为off档,手柄操纵开关连接电阻为r1时,为1档,手柄操纵开关连接电阻为r2时,为2档,手柄操纵开关连接电阻为r3时,为3档,手柄操纵开关连接电阻为r4时,为4档,手柄操纵开关连接电阻为r5时,为5档,手柄操纵开关连接电阻为r6时,为6档。
26.综上所述,由于采用了上述技术方案,本发明的有益效果是:
27.1、本发明是一种纯电动重型商用车能量回收分级控制方法和系统,变速箱处于不同档位时,整车采用不同的能量回收大小,确保能量回收时方向扭矩不超过驱动桥方向扭矩的限值,即整车控制器识别在较低档位时,降低能量回收系数,确保不超过驱动桥方向扭矩限值,有效保障驱动桥使用寿命。
28.2、本发明是一种纯电动重型商用车能量回收分级控制方法和系统,通过驱动电机馈电状态效率map图,选择电机转速对应能量回收特性曲线更靠近高效率区,得到更优的电机回馈特性曲线,避开较低转速时的大扭矩能量回收,提高车辆的平顺性,提高能量回收效率。
29.3、本发明是一种纯电动重型商用车能量回收分级控制方法和系统,有效解决了纯电动重型商用车在各种工况下的能量回收大小需求不一致的问题,通过增加手柄操纵开关提升驾驶员操纵的便利性,同时根据驱动电机特性、驱动桥方向扭矩限值优化能量回收大小,确保车辆的平顺性、高效性,以及车辆驱动桥使用寿命。
附图说明
30.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图,其中:
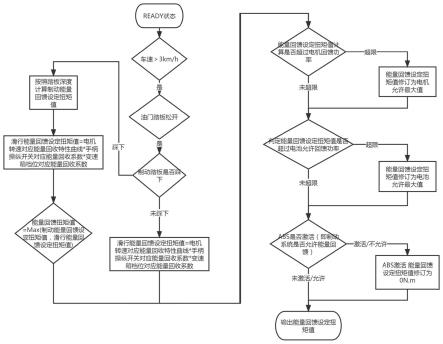
31.图1是本发明控制方法的流程示意图;
32.图2是手柄操纵开关的档位控制图;
33.图3是驱动电机的馈电状态效率map图。
具体实施方式
34.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明,即所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
35.需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
36.需要理解的是,术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
37.下面结合实施例对本发明的特征和性能作进一步的详细描述。
38.实施例一
39.如图1所示,本发明是一种纯电动重型商用车能量回收分级控制方法,包括以下步骤:
40.电动车车辆准状态,判断车辆行驶状态为滑行或者制动状态;
41.根据车辆行驶状态,确认能量回馈设定扭矩值;
42.判断能量回馈设定扭矩值是否超限,判断abs是否激活;
43.输出最终的能量回馈设定扭矩值。
44.优选的,所述判断车辆行驶状态具体为:
45.判断车辆行驶状态为滑行,具体的,车速大于3km/h,且油门踏板是松开时,制动踏板未踩下,控制系统进行能量回收;
46.判断车辆行驶状态为制动,具体的,车速大于3km/h,且油门踏板是松开时,制动踏板踩下,控制系统进行能量回收。
47.优选的,根据车辆行驶状态,确认能量回馈设定扭矩值,具体为:根据制动踏板是否踩下,确定能量回馈设定扭矩值,
48.当制动踏板未踩下,滑行能量回馈设定扭矩值=电机转速对应能量回收特性曲线*手柄操作开关对应能量回收系数*变速箱档位对应能量回收系数;
49.当制动踏板踩下,按照踏板深度计算的制动能量回馈设定扭矩值和滑行能量回馈设定扭矩值进行比较,获取最大的能量回馈设定扭矩值。
50.其中,电机转速与扭矩之间的关系为:随着电机转速增大,其扭矩先增大后减小,驱动电机的馈电状态效率map如图3所示,通过驱动电机馈电状态效率map图,本发明选择电机转速对应能量回收特性曲线更靠近高效率区,本发明的电机转速对应能量回收特性曲线值如表1所示。本发明可以避开较低转速(<500rpm)时的大扭矩能量回收,在较低转速时采用较大扭矩的能量回收,容易造成车辆的不平顺,并且能量回收效率不高,不经济。
51.表1,电机转速对应能量回收特性曲线值
52.转速(rpm)0100200300400500
ꢀꢀꢀꢀꢀꢀꢀ
扭矩(n.m)0500800110014001700
ꢀꢀꢀꢀꢀꢀꢀ
转速(rpm)60070080090010001100120013001400150016001700 扭矩(n.m)200020002000200020002000200020002000200020002000 转速(rpm)1800190020002100220023002400250026002700280029003000扭矩(n.m)1900180017001600150014001300120011001000900800700
53.本发明中,手柄操作开关对应能量回收系数如表2,
54.表2,手柄操作开关对应能量回收系数
[0055][0056]
本发明中,变速箱档位对应能量回收系数如表3(注:现设计车型轮边方向扭矩限值21000n.m)。
[0057]
表3,变速箱档位对应能量回收系数
[0058][0059][0060]
本发明的变速箱处于不同档位时,整车采用不同的能量回收大小,确保能量回收时方向扭矩不超过驱动桥方向扭矩的限值。即整车控制器识别在较低档位时,降低能量回收系数,确保不超过驱动桥方向扭矩限值,有效保障驱动桥使用寿命。
[0061]
优选的,所述确认能量回馈设定扭矩值是否超限,具体为:
[0062]
判断能量回馈设定扭矩值是否超过电机允许回馈功率,如果超过限制,能量回馈设定扭矩值修改为电机允许最大值;
[0063]
判断能量回馈设定扭矩值是否超过电池允许回馈功率,如果超过限制,能量回馈设定扭矩值修改为电池允许最大值。
[0064]
优选的,所述判断abs是否激活,即制动系统是否允许能量回馈,abs激活,制动系统不允许能量回馈,则能量回馈设定扭矩值修改为0n.m;
[0065]
能量回馈设定扭矩值未超限,并且abs没有激活,即输出车辆为滑行状态或者制动状态的能量回馈设定扭矩值。
[0066]
本发明的控制方法的根据车辆行驶状态,分为2种,滑行状态和制动状态。
[0067]
(1)滑行状态
[0068]
电动车为ready状态,确认车速》3km/h,且油门踏板松开,确认是否踩下刹车踏板,当制动踏板未踩下,滑行能量回馈设定扭矩值=电机转速对应能量回收特性曲线*手柄操作开关对应能量回收系数*变速箱档位对应能量回收系数;确认能量回馈设定扭矩值是否超限,如果能量回馈设定扭矩值超过电机允许回馈功率,则修改能量回馈设定扭矩值为电机允许的最大值,如果能量回馈设定扭矩值超过电池允许回馈功率,则修改能量回馈设定扭矩值为电池允许的最大值,确认abs是否激活,abs如果激活,即制动系统不允许能量回馈,则将能量回馈设定扭矩值修改为0n.m,如果能量回馈设定扭矩值未超限,且abs未激活,则输出该能量回馈设定扭矩值。
[0069]
(2)制动状态
[0070]
电动车为ready状态,确认车速》3km/h,且油门踏板松开,确认是否踩下刹车踏板,当制动踏板踩下,按照踏板深度计算的制动能量回馈设定扭矩值和滑行能量回馈设定扭矩值进行比较,获取最大的能量回馈设定扭矩值,将该能量回馈设定扭矩值进行上述超限确认和abs是否激活确认后,输出最终的能量回馈设定扭矩值。
[0071]
实施例二
[0072]
本实施例是对本发明的进一步说明。
[0073]
一种纯电动重型商用车能量回收分级控制系统,所述控制系统包括手柄操纵开关、整车控制器、电机控制器、驱动电机、amt变速箱、驱动桥和驱动轮,
[0074]
手柄操纵开关控制车辆档位,每一个档位对应一个能量回收系数,具体数据如表1,amt变速箱有4档,每一个档位对应一个能量回收系数;具体数据如表3。
[0075]
整车控制器采集手柄操纵开关档位信号,整车控制器识别到手柄操纵开关档位信号后按照上述控制方法,通过can通信发送控制命令至电机控制器,电机控制器执行控制命令,驱动电机转为发电状态,输出扭矩方向与电机运转方向相反,扭矩通过amt变速箱和驱动桥,传递到驱动轮,实现车辆能量回收。
[0076]
优选的,如图2所示,所述手柄操纵开关通过连接不同电阻控制档位,整车控制器采集手柄操纵开关电阻信号,即当电阻为r0时,为off档,手柄操纵开关连接电阻为r1时,为1档,手柄操纵开关连接电阻为r2时,为2档,手柄操纵开关连接电阻为r3时,为3档,手柄操纵开关连接电阻为r4时,为4档,手柄操纵开关连接电阻为r5时,为5档,手柄操纵开关连接电阻为r6时,为6档。
[0077]
本发明有效解决了纯电动重型商用车在各种工况下的能量回收大小需求不一致的问题,通过增加手柄操纵开关提升驾驶员操纵的便利性,同时根据驱动电机特性、驱动桥方向扭矩限值优化能量回收大小,确保车辆的平顺性、高效性,以及车辆驱动桥使用寿命。
[0078]
以上所述,仅为本发明的优选实施方式,但本发明的保护范围并不局限于此,任何熟悉本领域的技术人员在本发明所揭露的技术范围内,可不经过创造性劳动想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书所限定的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1