基于车联网的安全监控控制系统的制作方法
本发明涉及车辆安全,具体为一种基于车联网的安全监控控制系统。
背景技术:
1、随着经济的快速发展,随之而来的是越来越多的私家车出现,很多用户会开着私家车出游或者购物,其中不乏有幼童坐在私家车内,但是通常为了保证幼童的安全,会将幼童绑在安全带下方,使得幼童无法乱动,从而不会影响车主的安全驾驶,在到达目的地之后,为了避免小孩乱跑,车主会将幼童滞留在车内,但是车主往往会忘记将小孩从车内抱出,使得幼童在天气严寒或者天气炎热以及空间密闭的情形下导致幼童无法正常呼吸,在短时间内并没有人解救的情况下导致幼童昏厥甚至死亡;
2、新闻常常会出现,幼童因被遗忘在车内或者主动跑到他人车辆内,因车内空气不流通,且长时间呆在车内,氧气稀少,导致幼童在车内出现了危险,甚至有幼童因对安全带好奇,一直将安全带往外抽拉,导致安全带缠绕在幼童的脖子上,导致窒息死亡等案例等情况发生,以上都是因幼童家长对于幼童在车上不关注所造成的;
3、因此,需要一种基于车联网的安全监控控制系统来解决上述问题。
技术实现思路
1、本发明的目的在于提供一种基于车联网的安全监控控制系统,以解决上述背景技术中提出的问题。
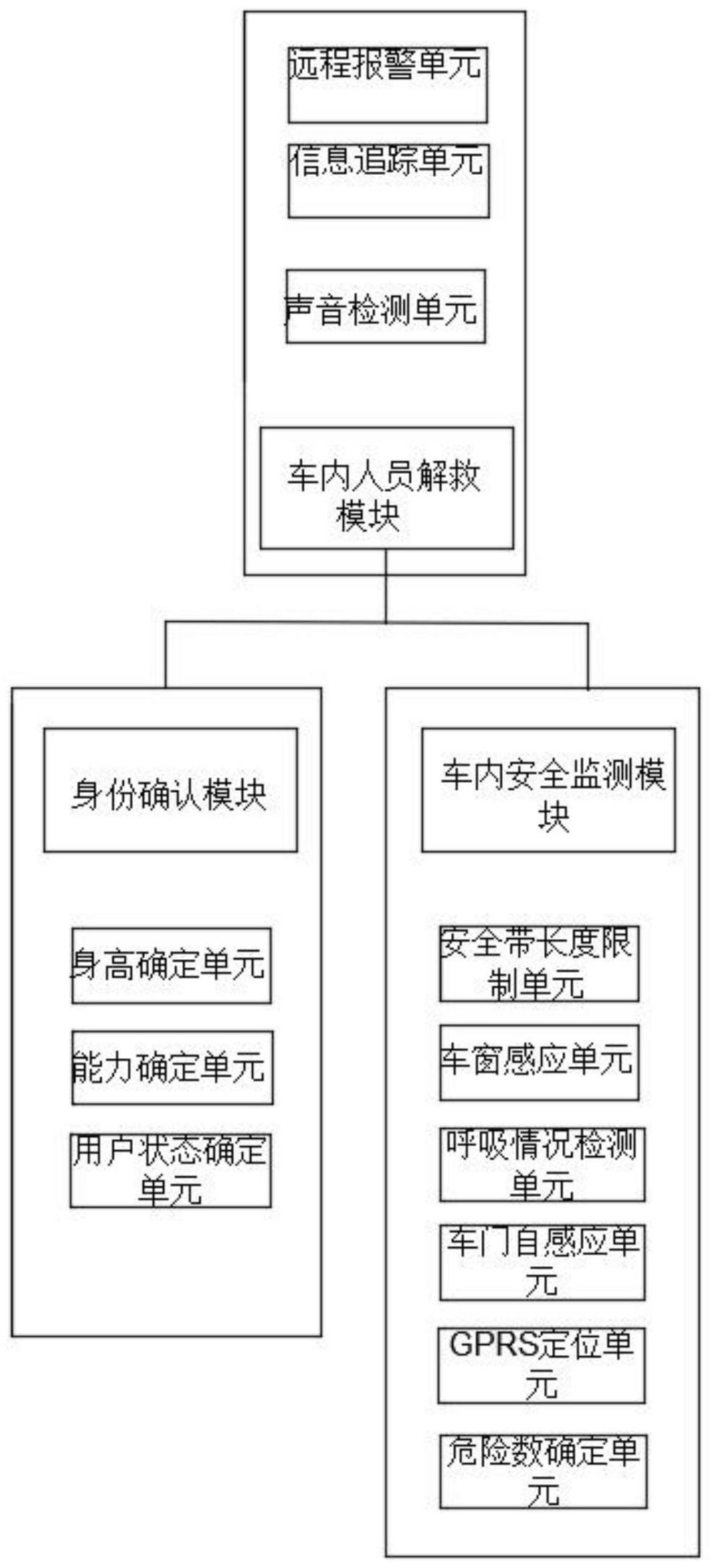
2、为了解决上述技术问题,本发明提供如下技术方案:一种基于车联网的安全监控控制系统,该系统包括该系统包括身份确认模块、车内安全监测模块和车内人员解救模块,所述身份确认模块用于对车内所坐的用户身份进行实时检测,判断车内是否有幼童的存在,所述车内安全监测模块用于根据车内幼童行为判断幼童是否会发生危险,并对用户端报警进行提示,所述车内人员解救模块用于检测到幼童被困在车内时,使用投影将求救信息进行发送,所述身份确认模块与车内安全监测模块和车内人员解决模块相连接;
3、所述身份确认模块包括身高确定单元、能力确定单元和用户状态确定单元,所述身高确定单元用于用户脚底位置与在车厢底座平面所对应长度判断用户的身高,所述能力确定单元用于根据用户的实际身高和脚底的长度判断出用户是否有能力自主解开安全带,所述用户状态确定单元用于对用户在预设时间内用户手脚挥动的次数判断用户此时的状态,所述身高确定单元的输出端与能力确定单元、用户状态确定单元的输入端相连接;
4、通过对用户脚底在车厢底座或者在座驾上感应区所显示的长度h={h1,h2...hm}进行实时检测,检测到用户的身高为w={w1,w2...wm},使用户状态确定单元检测到用户的手脚挥动的开始时间为ti,检测到用户手脚挥动的频率减小的时刻为ta,用户手脚挥动频率停止的时刻为tb,其中,t是指用户在不同状态下的频率值,tmax表示用手脚挥动频率的最大值;
5、根据公式:
6、检测到用户身高:w=6.876h;h为脚底在车厢底座或者在座驾上感应区所显示的长度;
7、用户自行解开安全带的能力值为p:p=kw+b;k为身高与解安全带能力系数,b为最小解安全带的能力;
8、当能力值p大于预设值时,表示用户有能力自行穿戴安全带,当能力值p小于预设值时,表示用户并无能力自行穿戴安全带;
9、当检测到用户没有能力进行自行穿戴安全带时,记录用户手脚挥动的频率t为如下,用户的状态为g(t),当计算到用户手脚挥动的频率t所对应的用户状态值不在g(t1)-g(t3)内时,表示此用户的状态,将用户此时的状态通过车联网发送给用户端;
10、
11、其中,g(t1)、g(t2)、g(t3)表示此用户的用户状态值,tc为手脚挥动频率临界值;
12、所述车内安全监测模块包括安全带长度限制单元、车窗感应单元、呼吸情况检测单元和车门自感应单元、gprs定位单元和危险数确定单元,所述安全带长度限制单元用于当检测到用户为幼童时,根据幼童自行打开安全带能力对车辆上的安全带长度进行限制,所述呼吸情况检测单元用于对用户的呼吸频率进行检测,判断安全带是否会导致用户产生危险,所述车门自感应单元用于当车主的车辆到达目的地后,根据车辆后方的车辆情况感应开门,所述车窗感应单元用于当车主在开车过程中,根据后方车辆行驶情况对幼童身体部位与车窗之间的参数进行计算,判断幼童的下个动作是否会导致危险情况的发生,所述gprs定位单元用于对车辆所在的位置进行实时检测,所述危险数确定单元用于根据幼童在车内的行为判断危险系数,并将危险数排序发送给用户端,所述安全带长度限制单元的输出端与脸部检测单元的输入端相连接,所述车门自感应单元的输出端与车窗感应单元、gprs定位单元和危险数确定单元的输入端相连接;
13、在二维平面模型中,设定幼童基于所坐车位对应左右两点位置的坐标为e(x′1,y′1)和f(x′2,y′2),其中,幼童坐在车座上产生的弧度顶点所对应的位置坐标为n(x′3,y′3),所述安全带所固定的三点位置坐标分别为a(a1,b1),b(a2,b2),c(a3,b3);
14、根据公式:
15、安全带点a与点c之间的距离为
16、安全带点a与点b之间的距离为
17、幼童坐在车辆上形成的身体宽度为
18、当大于预设比例时,对幼童坐在车座上身体所形成的曲线进行判断,设定曲线为y=ax2+bx+c,将安全带从a点至b点绑在幼童身上所形成的曲线进行判断,设定曲线为w=ea2+fa+o;
19、在曲线w拉伸向外拉伸至拉伸顶点位置o时,当位置o与顶点n的距离差值小于预设值时,表示此时安全带能够匹配幼童的身形曲线,当位置o与顶点n的距离差值大于预设值时,表示此时安全带不能匹配幼童的身形曲线,需要调整安全带的长度;
20、使用呼吸情况检测单元对幼童每分钟的正常呼吸次数xk进行检测,当检测到幼童的呼吸次数xu-xk>x时,需要紧急核对幼童此时的状况,判断安全带是否缠绕在幼童的脖子上,当幼童的呼吸次数为xu-xk≤x时,表示幼童此时的状况正常;
21、其中,a、b、c为曲线y的系数,e、f、o为曲线w的系数,yn表示幼童身形曲线上的凸出点f在曲线y上所对应的位置,gn表示幼童身形曲线上的凸出点f在曲线w上所对应的位置,xu表示幼童非正常呼吸频率,x表示预设呼吸频率,o表示所拉伸的最大点位置;经车门自感应单元检测,在二维平面模型中,用户车所停放位置为h(i,j),经检测其他车辆所对应位置集合为u={(m1,n1)、(m2,n2)...(mm,nm)},用户车门所打开的夹角为则用户车辆与用户车后放车辆的距离为用户车辆与其他车辆形成的夹角为根据其他车辆所改变的行驶路径所形成s的角度为β={β1,β2,β3...βm},改变位置后的其它车辆位置坐标为d=(mk,nk)与用户车辆所形成的夹角声当时,用户车辆与其他车辆不会相撞,用户车辆的车门可在此刻打开,当时,用户车辆与用户后方车辆会相撞,用户车门不可在此刻打开,其中,muk是用户车辆与用户后方不同车辆的距离,mdu是指用户车辆与改变位置后的其他车辆的距离;
22、经危险数确定单元检测得知,幼童在用户开车造成危险行为的因素集合为k={k1,k2...km},检测到幼童在用户端开车过程中经上述因素造成的危险次数的集合为n={n1,n2...nm},用户端行驶过程中幼童所得危险度为并将危险度按照从大到小的顺序发送给用户端,以便于引起用户端对幼童坐在车上安全的警惕,其中,g为危险度,nm是在危险因素中其中的危险次数,km是危险因素的其中一种;
23、所述车内人员解救模块包括声音检测单元、信息追踪单元和远程报警单元,所述声音检测单元用于使用车内安装的声音传感器对幼童的声音强度进行检测,从而能够感应到幼童此刻的状态且引起行人的注意,所述信息追踪单元用于使用红外感应传感器对用户车辆所在范围内路人的位置进行实时检测,使用全息投影装置将幼童的求救文字信息投影至周围路人的面前,所述远程报警单元用于在预设时间内并无路人经过所在范围内的车辆时,通过车辆内部的紧急供电系统,向所在停车场工作人员发送车辆的位置信息和对应车牌号码,所述远程报警单元的输出端与声音检测单元、信息追踪单元的输入端相连接;
24、所述信息追踪单元对车辆所在位置h(i,j)进行检测,设定以用户车辆为圆心所在半径为r,使用红外感应单元对所设定范围内的行人进行检测,在二维平面模型中,设定不同的行人位置为s={(c1,d1),(c2,d2)...(c3,d3)},其中,车辆所在位置与行人位置的距离为当mhs>r时,表示该用户位置不能被投射到相应的求救信号,当mhs<r时,表示此用户位置能够看到相应的求救信号;
25、所述全息投影装置安装在车辆内部,全息投影装置通过幼童所坐位置的车窗投射在行人的前方。
26、与现有技术相比,本发明所达到的有益效果是:
27、1.本发明使用了车内安全检测模块,根据车内身份得知坐在车座上用户是否能够有自行解开安全带的能力,使得安全带能够根据用户的身形曲线适度的绑在安全带上,使得坐在车上的用户不会因为安全带过紧或者过松导致用户安全无法保证,并且在用户车辆停放时,对用户后方车辆的位置进行实时检测,从而保证用户在下车的过程中并不会有危险产生,并根据安全带上所安装的感应片判断出安全带是否会在短时间内快速收缩,从而预防车内幼童被安全带缠绕导致窒息死亡;
28、2.本发明使用了车内人员解救模块,根据车内小孩哭泣声音的强度判断车内小孩的状态,是否有时间等待行人对车内幼童的救援,使用信息追踪单元,能够使用车内安装的全息投影装置对以用户车辆为圆心,预设距离为半径进行检测是否有行人,对检测到的行人使用求救文字投射在行人前方,从而能够提示行人有待救援的幼童,从而保障了幼童的生命安全。
- 还没有人留言评论。精彩留言会获得点赞!