一种可多方位行驶的教学编程小车的制作方法
本技术涉及无人车领域,特别涉及一种可多方位行驶的教学编程小车。
背景技术:
1、在人工智能时代,无人驾驶无异于是其中最为亮眼的科技,众多新能源造车新势力无一不竭尽全力致力于无人驾驶技术更高水平的研发,而小型无人车中市面上常见的多为遥控无人车,一般常见的可分为:玩具、车模(r/c)、警用等几类产品,在功能上更注重其娱乐性,主要具备行驶、手动改变形态等,不具备编程调试功能,吸引青少年人群关注学习程度不强,不适用于编程教学使用;现有的存在编程教学用无人小车,主要具备编程功能,偏向于编程教学,无人小车自身提升点不强,比如轮胎采用常见普通轮胎结构,在行驶状态仅能实现前进、后腿、拐弯等基础操作;对于新手使用人员,存在操作碰撞的状况,影响无人小车的使用寿命。
2、因此,发明一种可多方位行驶的教学编程小车来解决上述问题很有必要。
技术实现思路
1、本实用新型的目的在于提供一种可多方位行驶的教学编程小车,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种可多方位行驶的教学编程小车,包括无人车本体,所述无人车本体上设有控制机构和行驶轮,所述无人车本体的控制机构采用可编程控制机构,所述无人车本体的行驶轮采用麦克纳姆轮,所述无人车本体的前侧设有避障传感器,且与无人车本体的控制机构电连接,所述无人车本体的车体表面多处均设有防撞缓冲垫。
3、可选的,所述可编程控制机构上开设有编程接头,用于无人车的编程。
4、可选的,所述无人车本体的前侧安装有车灯,所述车灯与无人车本体的控制机构电连接。
5、可选的,所述无人车本体上安装有扬声器,所述扬声器与无人车本体的控制机构电连接。
6、可选的,所述防撞缓冲垫包括第一防撞垫和第二防撞垫,所述第一防撞垫设置为多个且设在无人车本体的侧边,所述第二防撞垫设置为多个且设在无人车本体的四个侧棱处。
7、可选的,所述无人车本体的顶部设有积木接头,所述无人车本体上设有与积木接头适配拼接的辅件。
8、本实用新型的技术效果和优点:
9、本实用新型通过在无人车的控制机构采用可编程控制机构,可编程控制无人车的多种行驶方式,可用于现代化智能科普、学习、搭建、编程使用,灵活多变,适用范围广;无人车的行驶轮采用麦克纳姆轮,给予无人车前行、横移、斜行、旋转及其组合等多种全方位运动方式,赋予无人车更多运动形态与行进灵活性,并且与可编程控制机构二者配合提升无人车的多变性与科技感;无人车本体上加设避障传感器,提升了无人车行驶的安全性能,并与可编程控制机构配合可编程控制无人车遇障时停止、减速或报警等多种避障形态。
技术特征:
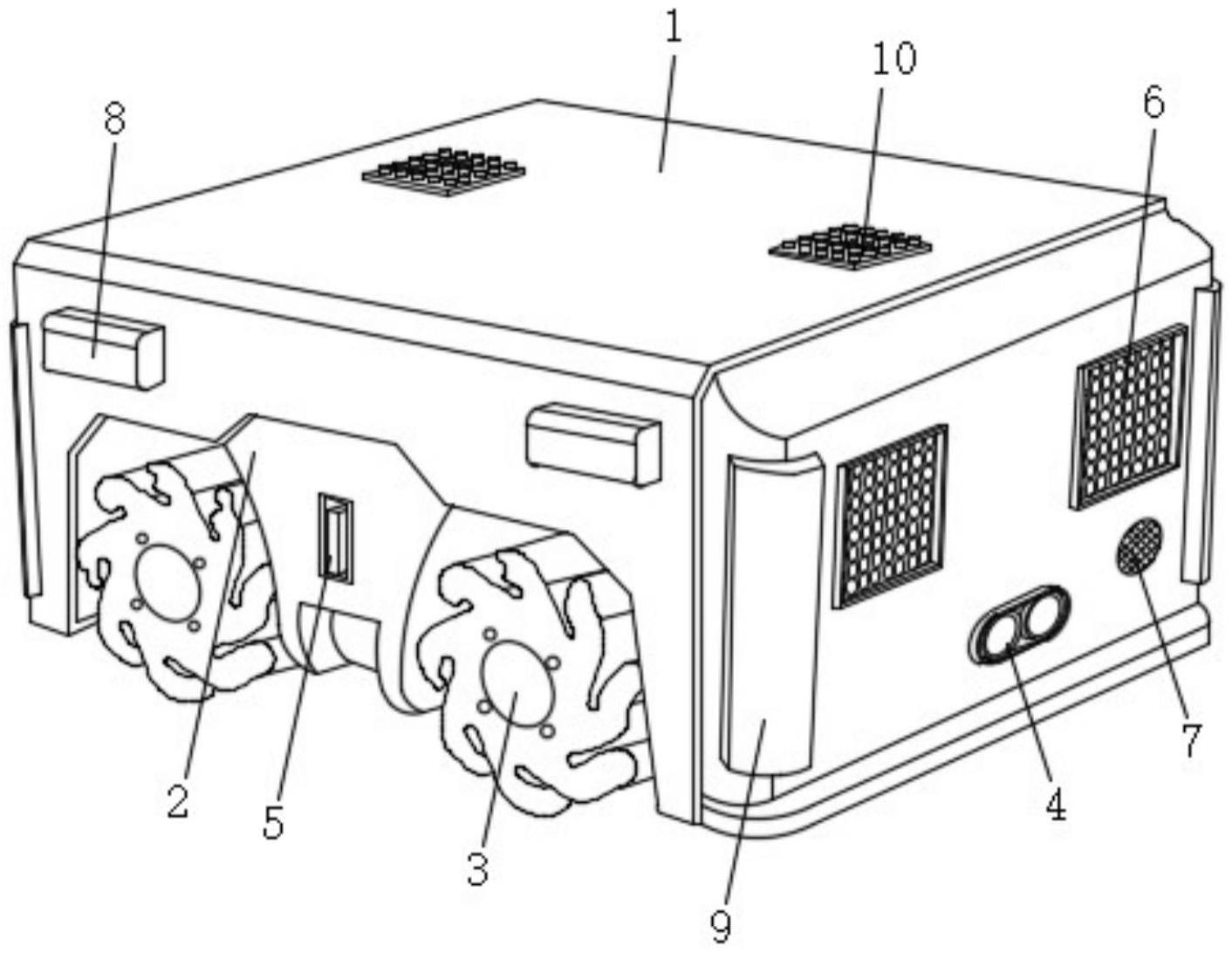
1.一种可多方位行驶的教学编程小车,包括无人车本体(1),所述无人车本体(1)上设有控制机构和行驶轮,其特征在于:所述无人车本体(1)的控制机构采用可编程控制机构(2),所述无人车本体(1)的行驶轮采用麦克纳姆轮(3),所述无人车本体(1)的前侧设有避障传感器(4),且与无人车本体(1)的控制机构电连接,所述无人车本体(1)的车体表面多处均设有防撞缓冲垫。
2.根据权利要求1所述的一种可多方位行驶的教学编程小车,其特征在于:所述可编程控制机构(2)上开设有编程接头(5),用于无人车的编程。
3.根据权利要求1所述的一种可多方位行驶的教学编程小车,其特征在于:所述无人车本体(1)的前侧安装有车灯(6),所述车灯(6)与无人车本体(1)的控制机构电连接。
4.根据权利要求1所述的一种可多方位行驶的教学编程小车,其特征在于:所述无人车本体(1)上安装有扬声器(7),所述扬声器(7)与无人车本体(1)的控制机构电连接。
5.根据权利要求1所述的一种可多方位行驶的教学编程小车,其特征在于:所述防撞缓冲垫包括第一防撞垫(8)和第二防撞垫(9),所述第一防撞垫(8)设置为多个且设在无人车本体(1)的侧边,所述第二防撞垫(9)设置为多个且设在无人车本体(1)的四个侧棱处。
6.根据权利要求1所述的一种可多方位行驶的教学编程小车,其特征在于:所述无人车本体(1)的顶部设有积木接头(10),所述无人车本体(1)上设有与积木接头(10)适配拼接的辅件(11)。
技术总结
本技术公开了一种可多方位行驶的教学编程小车,涉及无人车领域,包括无人车本体,所述无人车本体上设有控制机构和行驶轮,所述无人车本体的控制机构采用可编程控制机构,所述无人车本体的行驶轮采用麦克纳姆轮,所述无人车本体的前侧设有避障传感器,且与无人车本体的控制机构电连接。本技术通过在无人车的控制机构采用可编程控制机构,可编程控制无人车的多种行驶方式,灵活多变;无人车的行驶轮采用麦克纳姆轮,给予无人车前行、横移、斜行、旋转及其组合等多种全方位运动方式,赋予无人车更多运动形态与行进灵活性,并且与可编程控制机构二者配合提升无人车的多变性与科技感。
技术研发人员:徐建宇,杨志立,孙杰
受保护的技术使用者:河南小码搭科技有限公司
技术研发日:20221114
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!