一种自适应巡航的目标车辆切出检测方法及系统与流程
本发明属于汽车,尤其涉及一种自适应巡航的目标车辆切出检测方法及系统。
背景技术:
1、随着汽车智能化的快速发展,车辆的智能化配置水平越来越高,为了缓解驾驶员的驾驶疲劳,辅助驾驶的技术在车辆上搭配的比例也越来越高,在辅助驾驶功能中,自适应巡航功能因为能给给人很大的便利性,解封双脚,因此在开高速或者长时间行车时,应用的比例比较高,自适应巡航的舒适性对于辅助驾驶是比较重要的。自适应巡航acc的定义为:根据驾驶员设置的巡航速度和跟车时距,当前面没有车辆时,辅助驾驶系统控制车辆根据驾驶员设置的巡航速度行驶;当前面有车辆并且前车车速小于等于驾驶员设置的巡航速度时,辅助驾驶控制系统控制车辆根据跟车时距,跟随前车行驶;当前车的速度大于驾驶员设置的巡航速度时,辅助驾驶系统控制整车按照驾驶员设置的巡航速度行驶。因此对前车的准确判断,对acc存在较大影响,且当前车切出时,判断算法对acc的整个控制过程十分关键。常规的acc对于前车切出的方案主要有下面两种方式:1、在有车道线的acc巡航时,利用前摄像头来判断,当前摄像检测前车越过了左车道线或者右车道线时,判断acc跟车的前车切出;2、在没有车道线的路况进行acc巡航时,辅助驾驶控制器根据本车的现有状态,预估本车的路径,然后根据前毫米波雷达和/或前摄像头来检测前车的横向位置,当判断前车的横向超过acc预估的左车道线或者右车道线时,则判断前车已经切出。
2、但是现有技术具有以下的缺陷:
3、1、摄像头在雨雪、逆光或者道路上有积水时,检测存在一定误差,再就是前摄像头检测的距离超过一定距离时,也存在一定的误差,这些摄像头的特性会导致前车切出判断存在一定的误差特性;
4、2、对于前车的切出判断,未考虑本车左转或者右转时,一些比较大的变化对于本车的预估路径的影响,并且当本车快进入弯道但前车已经进入弯道时,对于前车的判断以及前车切出的判断会存在较大误差。
技术实现思路
1、本发明实施例的目的在于提供一种自适应巡航的目标车辆切出检测方法及系统,旨在解决背景技术中提出的问题。
2、为实现上述目的,本发明实施例提供如下技术方案:
3、一种自适应巡航的目标车辆切出检测方法,所述方法具体包括以下步骤:
4、通过前摄像头采集车道数据,通过前毫米波雷达探测前方目标车辆的距离数据,通过整车姿态传感器获取本车的运动参数,通过方向盘及组合开关采集驾驶数据;
5、对所述车道数据进行分析,判断是否检测到前方车道线,并判断检测质量是否达标;
6、在检测到前方车道线,且检测质量达标时,以所述前方车道线为依据,综合所述距离数据、所述运动参数和所述驾驶数据进行车道补偿分析,确定补偿车道线,并基于所述补偿车道线进行目标车辆的切出检测;
7、在未检测到前方车道线,或检测质量不达标时,通过acc控制器根据所述运动参数预估未来运动路径,以所述未来运动路径为依据,综合所述距离数据、所述运动参数和所述驾驶数据进行车道补偿分析,确定补偿车道线,并基于所述补偿车道线进行目标车辆的切出检测。
8、作为本发明实施例技术方案进一步的限定,所述方法还包括以下步骤:
9、在前摄像头功能处于不可用状态时,通过acc控制器根据所述运动参数预估未来运动路径,以所述未来运动路径为依据,综合所述距离数据、所述运动参数和所述驾驶数据进行车道补偿分析,确定补偿车道线,并基于所述补偿车道线进行目标车辆的切出检测。
10、作为本发明实施例技术方案进一步的限定,所述确定补偿车道线,并基于所述补偿车道线进行目标车辆的切出检测具体包括以下步骤:
11、获取左车道线位置值yleft和右车道线位置值yright;
12、根据左车道线位置值yleft和右车道线位置值yright,计算左修正车道线位置值yleftnew和右修正车道线位置值yrightnew;
13、根据左修正车道线位置值yleftnew和右修正车道线位置值yrightnew,计算车道中心线yinner;
14、基于车道中心线yinner,进行目标车辆的切出判断。
15、作为本发明实施例技术方案进一步的限定,所述计算左修正车道线位置值yleftnew和右修正车道线位置值yrightnew的公式为:
16、yleftnew=yleft+δe+δb+δz+δf
17、yrightnew=yright+δe+δb+δz+δf
18、其中,δe为驾驶员对车辆的驾驶意图修正系数;δb为本车在原点处距离车道中心线的偏移值;δz为目标车辆与本车的纵向距离修正参数;δf为驾驶员横向控制方向盘的修正系数。
19、作为本发明实施例技术方案进一步的限定,所述基于车道中心线yinner,进行目标车辆的切出判断具体包括以下步骤:
20、根据车道中心线yinner,计算目标车辆的偏移值offset;
21、当offset大于yleftnew,且offset的导数不小于0时,判定目标车辆切出左车道线;
22、当offset小于yrightnew,且offset的导数不大于0时,判定目标车辆切出右车道线。
23、作为本发明实施例技术方案进一步的限定,所述δe的值与驾驶员的驾驶意图相关,具体的:驾驶员打开左转向灯时,δe为正值;驾驶员打开右转向灯时,δe为负值;本车与目标车辆的纵向距离越大,δe的绝对值越大。
24、作为本发明实施例技术方案进一步的限定,所述在未检测到前方车道线,或检测质量不达标时,δb的值为0。
25、作为本发明实施例技术方案进一步的限定,所述基于车道中心线yinner,进行目标车辆的切出判断还包括以下步骤:
26、在判定目标车辆切出左车道线或右车道线时,通过acc控制器继续将所述目标车辆作为计算目标,跟进目标车辆500ms。
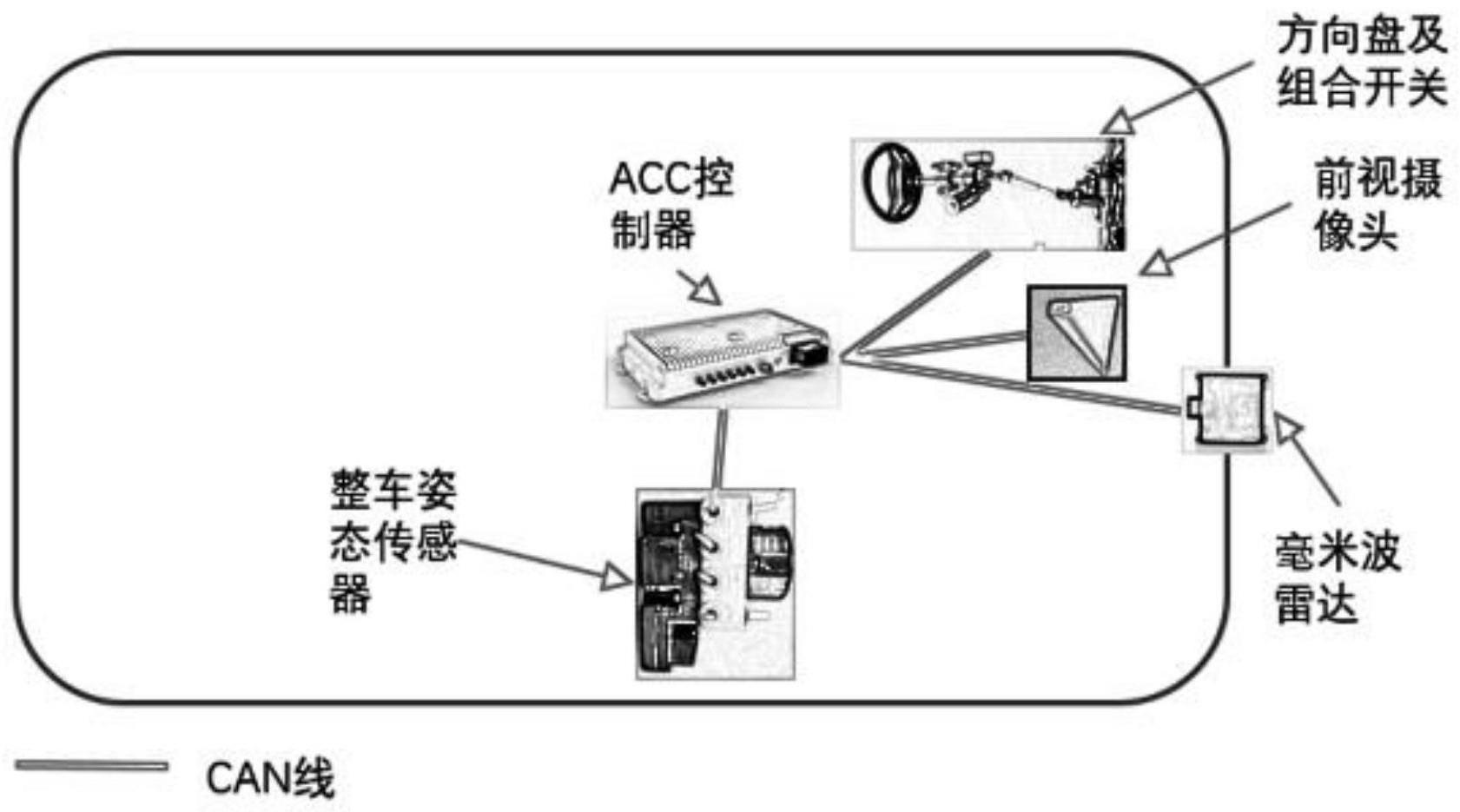
27、一种自适应巡航的目标车辆切出检测系统,所述系统包括前摄像头、前毫米波雷达、整车姿态传感器、方向盘及组合开关和acc控制器,其中:
28、前摄像头,用于识别前方目标信息,并进行目标分类,并识别车道线和车道线的置信度,采集车道数据发送至acc控制器;
29、前毫米波雷达,用于识别前方的目标信息,探测前方目标车辆的距离数据发送至acc控制器;
30、整车姿态传感器,用于采集本车的运动参数发送至acc控制器;
31、方向盘及组合开关,用于采集驾驶员对于本车的驾驶数据;
32、acc控制器,用于融合所述车道数据、所述距离数据、所述运动参数和所述驾驶数据,筛选确定目标车辆,进行acc跟车控制,并进行车道补偿分析,确定补偿车道线,基于所述补偿车道线进行目标车辆的切出检测。
33、作为本发明实施例技术方案进一步的限定,所述前摄像头、所述前毫米波雷达、所述整车姿态传感器和所述方向盘及组合开关均与所述acc控制器通过can线通信连接。
34、与现有技术相比,本发明的有益效果是:
35、本发明实施例通过对车道数据进行分析,判断是否检测到前方车道线,并判断检测质量是否达标;在检测到前方车道线,且检测质量达标时,并基于补偿车道线进行目标车辆的切出检测;在未检测到前方车道线,或检测质量不达标时,预估未来运动路径,综合距离数据、运动参数和驾驶数据进行车道补偿分析,确定补偿车道线,进行目标车辆的切出检测。能够提高对前方目标车辆切出判断的准确性与效率,有效避免由于切出判断不准确导致的急刹车与剐蹭事故,保障acc的可靠性,同时在弯道时也有比较好的表现,能让acc对车辆的控制更加舒适、流畅。
- 还没有人留言评论。精彩留言会获得点赞!