全向移动底盘
本发明属于机器人底盘结构设计,具体涉及一种全向移动底盘。
背景技术:
1、
2、现有轮式移动机器人底盘通常采用麦克纳姆轮或全向轮结构以实现全向移动,其驱动机构包括单独的驱动电机和车轮,通过各轮的运动合成来实现整个底盘的全向移动,各轮组的布置结构比较复杂,另外麦克纳姆轮和全向轮本体结构的复杂程度远超普通车轮,维护成本高。麦克纳姆轮是由与主轮成45度角的小轮接触地面,而接触地面的位置不单单在主轮滚动的方向变化,在轮轴方向也会有变化,因此对于地面的平整度要求比较高,地形适应能力较差;而全向轮在转向工作时存在滑动摩擦,难以实现运动的精确控制。
3、基于上述问题,有必要设计一种结构相对简单的全向移动底盘结构,能够在较为粗糙的地面上实现全向移动,同时又能够保证运动的精确控制。
技术实现思路
1、有鉴于此,本发明提供一种全向移动底盘,旨在解决上述问题。
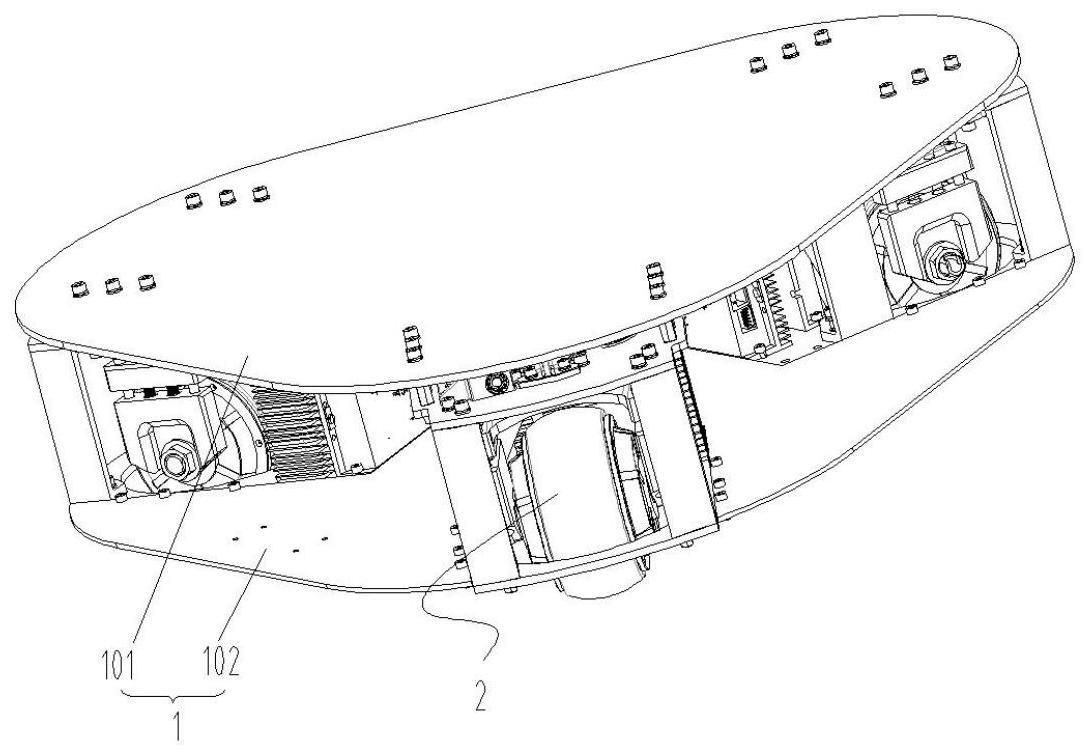
2、为实现上述目的,本发明提供如下技术方案:一种全向移动底盘,包括底座和安装于底座上的多个驱动轮组;所述驱动轮组包括轮毂电机、轮毂电机支架、转向机构和轮组安装座,所述轮毂电机套设有轮胎并连接于轮毂电机支架上,所述轮组安装座安装于底座上,所述转向机构安装于轮组安装座上用于控制轮毂电机的转向;所述转向机构包括转向电机、蜗轮和蜗杆,所述蜗杆与转向电机传动连接,蜗轮与蜗杆驱动连接并与轮毂电机支架传动连接,通过蜗轮蜗杆传动实现轮毂电机的转向;所述驱动轮组还包括用于控制轮毂电机和转向电机工作的电机驱动器。
3、进一步,所述驱动轮组为三组并成120度间隔均布于底座上。
4、进一步,所述底座包括上层安装板和下层安装板,所述驱动轮组安装于上层安装板和下层安装板之间,且所述轮毂电机的外缘向下凸起于下层安装板。
5、进一步,所述轮组安装座包括轮组上安装板和轮组下安装板,所述转向机构安装于轮组上安装板的上方,所述轮毂电机支架位于轮组上安装板的下方,且所述轮毂电机支架的上端贯穿轮组上安装板后与转向机构的蜗轮固定连接;所述电机驱动器包括转向电机驱动器和轮毂电机驱动器并安装于轮组下安装板上。
6、进一步,所述轮组上安装板的下端面固定连接有连接法兰,所述连接法兰的中部设有转动轴承,所述轮毂电机支架的顶部配合安装于转动轴承。
7、进一步,所述轮毂电机支架包括上支架和下支架,所述上支架与蜗轮固定连接,所述下支架与轮毂电机固定连接,于所述上支架和下支架之间设有减振组件。
8、进一步,所述下支架为两组并分别位于轮毂电机的横向两侧。
9、进一步,所述减振组件包括阻尼器和导向柱,所述阻尼器的一端与上支架连接,所述阻尼器的另一端与下支架连接;所述导向柱的上端与上支架固定连接,所述导向柱的下端与下支架活动连接。
10、进一步,所述阻尼器为液压阻尼器,液压阻尼器的缸体与上支架螺纹连接,且缸体上下贯穿上支架。
11、进一步,所述轮组安装座上对应蜗轮的位置安装有编码器安装盘,所述编码器安装盘内部安装有用以获取蜗轮实时转角的磁盘编码器。
12、与现有技术相比,本发明至少包括以下一种有益效果:
13、1、本发明提供的全向移动底盘结构,由于每个驱动轮组可以独立的完成行走和转向,转向机构可以控制轮毂电机360度自由转向,进而带动整个底盘结构的全向移动,同时可以实现原地转向而不存在转弯半径,可以实现狭小空间内作业;
14、2、本发明采用的是带轮胎的一体化电机,可以在复杂的路面上行走,对路面的平整度要求较低,轮毂电机的控制和定位较为简单;
15、3、本发明采用的驱动轮组为模块化的结构设计,整个驱动轮组独立安装,对整体布置的精度要求较低,降低了安装难度,维修时,整个驱动轮组可独立拆装,降低维修难度;
16、4、本发明的驱动轮组转向功能采用蜗杆蜗轮传动,利用其传动的自锁性防止转向时轮组受到横向力而使轮组速度的方向发生偏移,确保转向的准确性,进而保证运动的准确性;
17、5、本发明提供的全向移动底盘结构还具有静止状态时的自锁功能,由于每个驱动轮组可独立控制转向,底盘停下时,可控制每个轮偏转一定角度,此时各轮的滚动方向不一致,外加的横向力无法使每个轮都向同一个方向做滚动,如斜面行驶时,可增强在斜面停止时的稳定性,进而保证运动路径控制的准确性;
18、6、本发明提供的全向移动底盘结构可根据底盘的尺寸、形状等选择驱动轮组的数量和布置形式,适应性高。
19、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
技术特征:
1.一种全向移动底盘,其特征在于:包括底座和安装于底座上的多个驱动轮组;所述驱动轮组包括轮毂电机、轮毂电机支架、转向机构和轮组安装座,所述轮毂电机套设有轮胎并连接于轮毂电机支架上,所述轮组安装座安装于底座上,所述转向机构安装于轮组安装座上用于控制轮毂电机的转向;
2.根据权利要求1所述的全向移动底盘,其特征在于:所述驱动轮组为三组并成120度间隔均布于底座上。
3.根据权利要求1所述的全向移动底盘,其特征在于:所述底座包括上层安装板和下层安装板,所述驱动轮组安装于上层安装板和下层安装板之间,且所述轮毂电机的外缘向下凸起于下层安装板。
4.根据权利要求1所述的全向移动底盘,其特征在于:所述轮组安装座包括轮组上安装板和轮组下安装板,所述转向机构安装于轮组上安装板的上方,所述轮毂电机支架位于轮组上安装板的下方,且所述轮毂电机支架的上端贯穿轮组上安装板后与转向机构的蜗轮固定连接;所述电机驱动器包括转向电机驱动器和轮毂电机驱动器并安装于轮组下安装板上。
5.根据权利要求4所述的全向移动底盘,其特征在于:所述轮组上安装板的下端面固定连接有连接法兰,所述连接法兰的中部设有转动轴承,所述轮毂电机支架的顶部配合安装于转动轴承。
6.根据权利要求4所述的全向移动底盘,其特征在于:所述轮毂电机支架包括上支架和下支架,所述上支架与蜗轮固定连接,所述下支架与轮毂电机固定连接,于所述上支架和下支架之间设有减振组件。
7.根据权利要求6所述的全向移动底盘,其特征在于:所述下支架为两组并分别位于轮毂电机的横向两侧。
8.根据权利要求6所述的全向移动底盘,其特征在于:所述减振组件包括阻尼器和导向柱,所述阻尼器的一端与上支架连接,所述阻尼器的另一端与下支架连接;所述导向柱的上端与上支架固定连接,所述导向柱的下端与下支架活动连接。
9.根据权利要求8所述的全向移动底盘,其特征在于:所述阻尼器为液压阻尼器,液压阻尼器的缸体与上支架螺纹连接,且缸体上下贯穿上支架。
10.根据权利要求1所述的全向移动底盘,其特征在于:所述轮组安装座上对应蜗轮的位置安装有编码器安装盘,所述编码器安装盘内部安装有用以获取蜗轮实时转角的磁盘编码器。
技术总结
本发明公开了一种全向移动底盘,包括底座和安装于底座上的多个驱动轮组;驱动轮组包括轮毂电机、轮毂电机支架、转向机构和轮组安装座,轮毂电机套设有轮胎并连接于轮毂电机支架上,轮组安装座安装于底座上,转向机构安装于轮组安装座上用于控制轮毂电机的转向;转向机构包括转向电机、蜗轮和蜗杆,蜗杆与转向电机传动连接,蜗轮与蜗杆驱动连接并与轮毂电机支架传动连接,通过蜗轮蜗杆传动实现轮毂电机的转向;驱动轮组还包括用于控制轮毂电机和转向电机工作的电机驱动器;本发明提供的全向移动底盘能够在较为粗糙的地面上实现全向移动,具有双重自锁功能,能够保证运动的精确控制,同时模块化的设计结构降低了维护和安装难度。
技术研发人员:李祖锋,张龙发,刘宗敏,刘鹏达,敖文刚,张会焱
受保护的技术使用者:重庆工商大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!