车辆指示灯的控制方法及系统与流程
本技术涉及智能控制领域,且更为具体地,涉及一种车辆指示灯的控制方法及系统。
背景技术:
1、随着汽车消费的普及,人们对汽车安全的要求越来越高,而不规范的驾驶行为是导致发生事故的主要原因之一。其中不规范的驾驶行为就包括车辆指示灯的不正确使用,例如,变换车道前不打转向灯、在可见度低的行驶环境以及紧急泊车时不开双闪,对面有车开来、离前面同方向的车距离较近时忘记将远光灯切换为近光灯等。
2、汽车指示灯对汽车行驶的安全性作用重大。现有的汽车指示灯的开启主要依靠驾驶员主动开启,一旦驾驶员注意力不集中,那么就会因为汽车指示灯的错误使用而导致交通事故的发生,从而给驾驶员造成不可挽回的损失。
3、因此,期望一种智能化的车辆指示灯的控制方案。
技术实现思路
1、为了解决上述技术问题,提出了本技术。本技术的实施例提供了一种车辆指示灯的控制方法及系统,其通过采用基于深度学习的神经网络模型挖掘出车辆行驶状态数据中的各个参数的时序动态关联特征信息,以此来对于车辆的行驶状态进行准确地判断,从而进行相应地车辆指示灯控制,以保证驾驶员的行驶安全性。
2、根据本技术的一个方面,提供了一种车辆指示灯的控制方法,其包括:
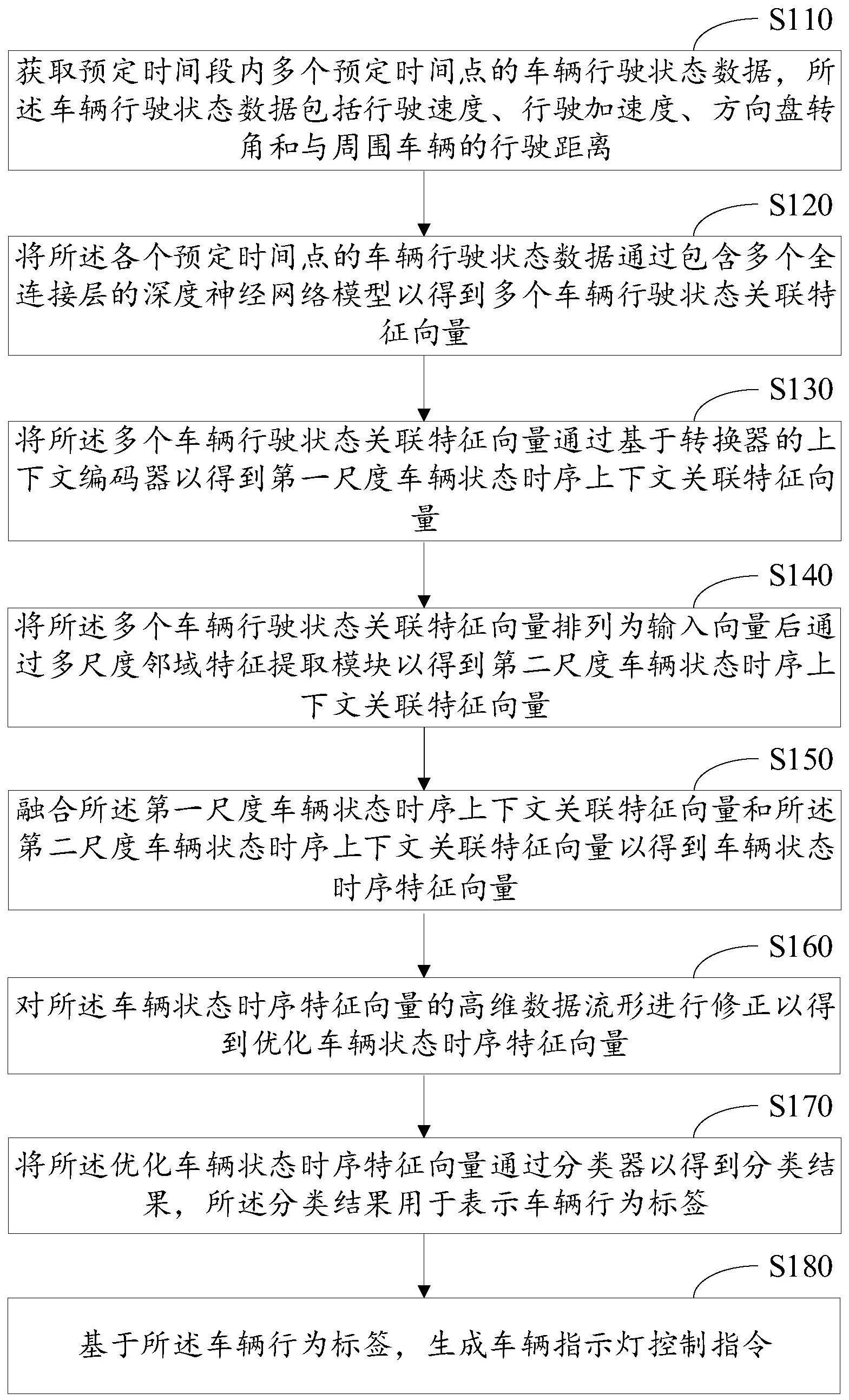
3、获取预定时间段内多个预定时间点的车辆行驶状态数据,所述车辆行驶状态数据包括行驶速度、行驶加速度、方向盘转角和与周围车辆的行驶距离;
4、将所述各个预定时间点的车辆行驶状态数据通过包含多个全连接层的深度神经网络模型以得到多个车辆行驶状态关联特征向量;
5、将所述多个车辆行驶状态关联特征向量通过基于转换器的上下文编码器以得到第一尺度车辆状态时序上下文关联特征向量;
6、将所述多个车辆行驶状态关联特征向量排列为输入向量后通过多尺度邻域特征提取模块以得到第二尺度车辆状态时序上下文关联特征向量;
7、融合所述第一尺度车辆状态时序上下文关联特征向量和所述第二尺度车辆状态时序上下文关联特征向量以得到车辆状态时序特征向量;
8、对所述车辆状态时序特征向量的高维数据流形进行修正以得到优化车辆状态时序特征向量;
9、将所述优化车辆状态时序特征向量通过分类器以得到分类结果,所述分类结果用于表示车辆行为标签;
10、基于所述车辆行为标签,生成车辆指示灯控制指令。
11、在上述车辆指示灯的控制方法中,将所述各个预定时间点的车辆行驶状态数据通过包含多个全连接层的深度神经网络模型以得到多个车辆行驶状态关联特征向量,包括:使用所述深度神经网络模型的全连接层以如下公式对所述各个预定时间点的车辆行驶状态数据进行全连接编码以得到所述多个车辆行驶状态关联特征向量,其中,所述公式为:,其中x是所述各个预定时间点的车辆行驶状态数据,y是输出向量,w是权重矩阵,b是偏置向量,表示矩阵相乘。
12、在上述车辆指示灯的控制方法中,将所述多个车辆行驶状态关联特征向量通过基于转换器的上下文编码器以得到第一尺度车辆状态时序上下文关联特征向量,包括:使用所述包含嵌入层的上下文编码器的转换器对所述多个车辆行驶状态关联特征向量进行基于转换器思想的全局上下文语义编码以得到多个全局上下文语义车辆行驶状态关联特征向量;以及,将所述多个全局上下文语义车辆行驶状态关联特征向量进行级联以得到所述第一尺度车辆状态时序上下文关联特征向量。
13、在上述车辆指示灯的控制方法中,使用所述包含嵌入层的上下文编码器的转换器对所述多个车辆行驶状态关联特征向量进行基于转换器思想的全局上下文语义编码以得到多个全局上下文语义车辆行驶状态关联特征向量,包括:将所述多个车辆行驶状态关联特征向量进行一维排列以得到全局车辆行驶状态关联特征向量;计算所述全局车辆行驶状态关联特征向量与所述多个车辆行驶状态关联特征向量中各个车辆行驶状态关联特征向量的转置向量之间的乘积以得到多个自注意力关联矩阵;分别对所述多个自注意力关联矩阵中各个自注意力关联矩阵进行标准化处理以得到多个标准化后自注意力关联矩阵;将所述多个标准化后自注意力关联矩阵中各个标准化后自注意力关联矩阵通过softmax分类函数以得到多个概率值;分别以所述多个概率值中各个概率值作为权重对所述多个车辆行驶状态关联特征向量中各个车辆行驶状态关联特征向量进行加权以得到所述多个上下文语义车辆行驶状态关联特征向量;将所述多个上下文语义车辆行驶状态关联特征向量进行级联以得到所述全局上下文语义车辆行驶状态关联特征向量。
14、在上述车辆指示灯的控制方法中,所述多尺度邻域特征提取模块,包括:第一卷积层、与所述第一卷积层并行的第二卷积层,以及,与所述第一卷积层和所述第二卷积层连接的多尺度特征融合层,其中,所述第一卷积层使用具有第一长度的一维卷积核,所述第二卷积层使用具有第二长度的一维卷积核。
15、在上述车辆指示灯的控制方法中,将所述多个车辆行驶状态关联特征向量排列为输入向量后通过多尺度邻域特征提取模块以得到第二尺度车辆状态时序上下文关联特征向量,包括:将所述车辆行驶状态关联输入向量输入所述多尺度邻域特征提取模块的第一卷积层以得到第一邻域尺度车辆状态时序上下文关联特征向量,其中,所述第一卷积层具有第一长度的第一一维卷积核;将所述车辆行驶状态关联输入向量输入所述多尺度邻域特征提取模块的第二卷积层以得到第二邻域尺度车辆状态时序上下文关联特征向量,其中,所述第二卷积层具有第二长度的第二一维卷积核,所述第一长度不同于所述第二长度;以及,将所述第一邻域尺度车辆状态时序上下文关联特征向量和所述第二邻域尺度车辆状态时序上下文关联特征向量进行级联以得到所述第二尺度车辆状态时序上下文关联特征向量。其中,将所述车辆行驶状态关联输入向量输入所述多尺度邻域特征提取模块的第一卷积层以得到第一邻域尺度车辆状态时序上下文关联特征向量,包括:使用所述多尺度邻域特征提取模块的第一卷积层以如下公式对所述车辆行驶状态关联输入向量进行一维卷积编码以得到第一邻域尺度车辆状态时序上下文关联特征向量;
16、其中,所述公式为:
17、
18、其中,a为第一卷积核在x方向上的宽度、f(a)为第一卷积核参数向量、g(x-a)为与卷积核函数运算的局部向量矩阵,w为第一卷积核的尺寸,x表示所述车辆行驶状态关联输入向量;以及,将所述车辆行驶状态关联输入向量输入所述多尺度邻域特征提取模块的第二卷积层以得到第二邻域尺度车辆状态时序上下文关联特征向量,包括:使用所述多尺度邻域特征提取模块的第二卷积层以如下公式对所述车辆行驶状态关联输入向量进行一维卷积编码以得到所述第二邻域尺度车辆状态时序上下文关联特征向量;
19、其中,所述公式为:
20、
21、其中,b为第二卷积核在x方向上的宽度、f(b)为第二卷积核参数向量、g(x-b)为与卷积核函数运算的局部向量矩阵,m为第二卷积核的尺寸,x表示所述车辆行驶状态关联输入向量。
22、在上述车辆指示灯的控制方法中,融合所述第一尺度车辆状态时序上下文关联特征向量和所述第二尺度车辆状态时序上下文关联特征向量以得到车辆状态时序特征向量,包括:以如下公式来融合所述第一尺度车辆状态时序上下文关联特征向量和所述第二尺度车辆状态时序上下文关联特征向量以得到车辆状态时序特征向量;其中,所述公式为:
23、v=concat[v1,v2]
24、其中,v1表示所述第一尺度车辆状态时序上下文关联特征向量,v2表示所述第二尺度车辆状态时序上下文关联特征向量,concat[·,·]表示级联函数,v表示所述车辆状态时序特征向量。
25、在上述车辆指示灯的控制方法中,对所述车辆状态时序特征向量的高维数据流形进行修正以得到优化车辆状态时序特征向量,包括:以如下公式对所述车辆状态时序特征向量进行向量赋范的希尔伯特概率空间化以得到所述优化车辆状态时序特征向量;其中,所述公式为:
26、
27、其中v是所述车辆状态时序特征向量,‖v‖2表示所述车辆状态时序特征向量的二范数,表示所述车辆状态时序特征向量的二范数的平方,vi是所述车辆状态时序特征向量的第i个特征值,exp(·)表示向量的指数运算,所述向量的指数运算表示计算以向量中各个位置的特征值为幂的自然指数函数值,且vi′是所述优化车辆状态时序特征向量的第i个特征值。
28、在上述车辆指示灯的控制方法中,将所述优化车辆状态时序特征向量通过分类器以得到分类结果,所述分类结果用于表示车辆行为标签,包括:使用所述分类器以如下公式对所述优化车辆状态时序特征向量进行处理以获得分类结果,其中,所述公式为:
29、o=softmax{(wn,bn):…:(w1,b1)|x},其中,w1到wn为权重矩阵,b1到bn为偏置向量,x为优化车辆状态时序特征向量。
30、根据本技术的另一方面,提供了一种车辆指示灯的控制系统,其包括:
31、数据获取模块,用于获取预定时间段内多个预定时间点的车辆行驶状态数据,所述车辆行驶状态数据包括行驶速度、行驶加速度、方向盘转角和与周围车辆的行驶距离;
32、全连接编码模块,用于将所述各个预定时间点的车辆行驶状态数据通过包含多个全连接层的深度神经网络模型以得到多个车辆行驶状态关联特征向量;
33、上下文编码模块,用于将所述多个车辆行驶状态关联特征向量通过基于转换器的上下文编码器以得到第一尺度车辆状态时序上下文关联特征向量;
34、多尺度邻域特征提取模块,用于将所述多个车辆行驶状态关联特征向量排列为输入向量后通过多尺度邻域特征提取模块以得到第二尺度车辆状态时序上下文关联特征向量;
35、融合模块,用于融合所述第一尺度车辆状态时序上下文关联特征向量和所述第二尺度车辆状态时序上下文关联特征向量以得到车辆状态时序特征向量;
36、优化模块,用于对所述车辆状态时序特征向量的高维数据流形进行修正以得到优化车辆状态时序特征向量;
37、分类结果生成模块,用于将所述优化车辆状态时序特征向量通过分类器以得到分类结果,所述分类结果用于表示车辆行为标签;
38、控制模块,用于基于所述车辆行为标签,生成车辆指示灯控制指令。
39、根据本技术的再一方面,提供了一种电子设备,包括:处理器;以及,存储器,在所述存储器中存储有计算机程序指令,所述计算机程序指令在被所述处理器运行时使得所述处理器执行如上所述的车辆指示灯的控制方法。
40、根据本技术的又一方面,提供了一种计算机可读介质,其上存储有计算机程序指令,所述计算机程序指令在被处理器运行时使得所述处理器执行如上所述的车辆指示灯的控制方法。
41、与现有技术相比,本技术提供的一种车辆指示灯的控制方法及系统,其通过采用基于深度学习的神经网络模型挖掘出车辆行驶状态数据中的各个参数的时序动态关联特征信息,以此来对于车辆的行驶状态进行准确地判断,从而进行相应地车辆指示灯控制,以保证驾驶员的行驶安全性。
- 还没有人留言评论。精彩留言会获得点赞!