一种基于摄像头式电磁主动悬架控制系统
本发明涉及一种基于摄像头式电磁主动悬架控制系统。
背景技术:
1、目前车辆的智能化程度越来越高,为保障无人驾驶汽车的安全性及可靠性,相关功能的开发大多集中于对环境感知、路径规划以及决策控制的研究,却很少考虑到摄像头式电磁主动悬架控制技术,且对于摄像头式电磁主动悬架控制的评价指标相对单一,但对于汽车的平顺性和驾驶员的舒适性而言,摄像头式电磁主动悬架需要考虑目标物坐标检测评价因子、运动探测距离和色彩分析评价因子、路面噪点检测评价因子,因此如何有效保证车辆在行驶时的平顺性以及舒适性成为了申请人亟待解决的技术问题。为改善这些问题,本发明提出了一种基于摄像头式电磁主动悬架控制系统。
技术实现思路
1、本发明的目的在于提供一种基于摄像头式电磁主动悬架控制系统,以解决上述背景技术中所面临的问题。
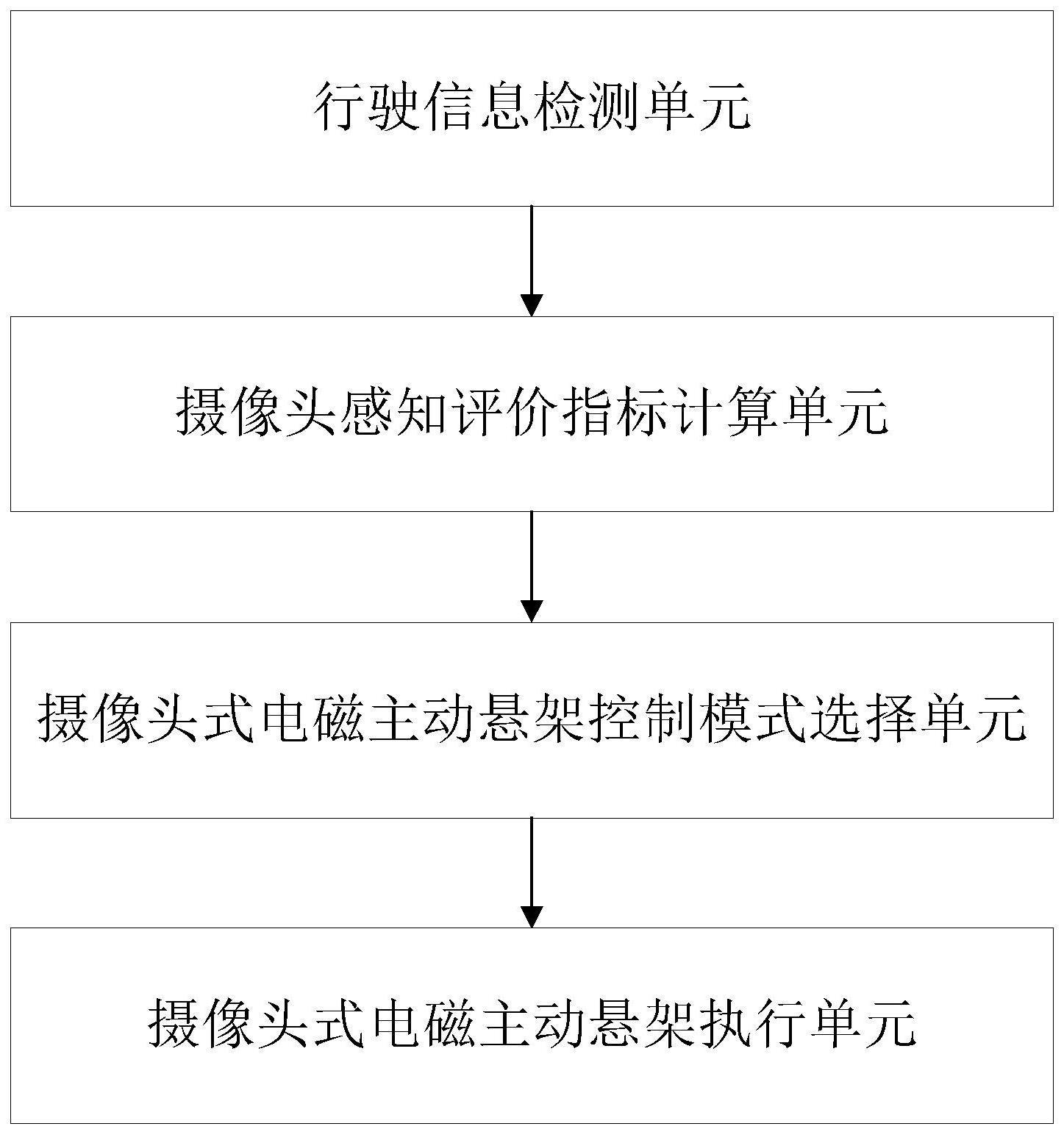
2、为实现上述目的,本发明提供如下技术方案:一种基于摄像头式电磁主动悬架控制系统,包括行驶信息检测单元、摄像头感知评价指标计算单元、摄像头式电磁主动悬架控制模式选择单元、摄像头式电磁主动悬架执行单元。
3、所述行驶信息检测单元用于获取摄像头检测噪点个数n0、一级负载阻抗控制模式的执行时间t1、二级负载阻抗控制模式的执行时间t2、三级负载阻抗控制模式的执行时间t3;
4、所述摄像头感知评价指标计算单元用于计算目标物坐标检测评价因子j1、运动探测距离和色彩分析评价因子j2、路面噪点检测评价因子j3,从而得到摄像头感知评价指标j;目标物坐标检测评价因子j1取决于整车搭载前置摄像头个数n1、整车搭载侧方前视摄像头个数n2、整车搭载侧方后视摄像头个数n3、整车搭载后置摄像头个数n4、坐标转换评估因子k00,其中,坐标转换评估因子k00取决于车辆坐标系下前置摄像头检测目标物中心坐标(x01,y01,z01)、车辆坐标系下侧方前视摄像头检测目标物中心坐标(x02,y02,z02)、车辆坐标系下侧方后视摄像头检测目标物中心坐标(x03,y03,z03)、车辆坐标系下后置摄像头检测目标物中心坐标(x04,y04,z04);运动探测距离和色彩分析评价因子j2取决于探测距离综合系数kl、色彩转换综合系数krgb,其中探测距离综合系数kl取决于前置摄像头的最大探测距离lx0max、前置摄像头的实际探测距离lx0act、侧方前视摄像头的最大探测距离ly0max、侧方前视摄像头的实际探测距离ly0act、侧方后视摄像头的最大探测距离ly1max、侧方后视摄像头的实际探测距离ly1act、后置摄像头的最大探测距离lx1max、后置摄像头的实际探测距离lx1act,色彩转换综合系数krgb取决于人眼感应前置摄像头检测目标物的色彩三基色(r11,g11,b11)、人眼感应侧方前视摄像头检测目标物的色彩三基色(r22,g22,b22)、人眼感应侧方后视摄像头检测目标物的色彩三基色(r33,g33,b33)、人眼感应后置摄像头检测目标物的色彩三基色(r44,g44,b44);路面噪点检测评价因子j3取决于路面检测抗干扰因子kl、摄像头检测目标物的噪点值τ、摄像头检测噪点个数n0、路况分类指数kl0、噪点检测系数kτ;
5、所述摄像头式电磁主动悬架控制模式选择单元包括一级负载阻抗控制模式、二级负载阻抗控制模式、三级负载阻抗控制模式,三级负载阻抗控制模式的控制强度高于二级负载阻抗控制模式,二级负载阻抗控制模式的控制强度高于一级负载阻抗控制模式,通过设计一级负载阻抗控制因子阈值γ1、二级负载阻抗控制因子阈值γ2、三级负载阻抗控制因子阈值γ3来描述控制模式的控制强度,其中,0<γ3<γ2<γ1<1;当摄像头感知评价指标j满足γ1≤j<1时,所述摄像头式电磁主动悬架执行单元执行一级负载阻抗控制模式,当摄像头感知评价指标j满足γ2≤j<γ1时,所述摄像头式电磁主动悬架执行单元执行二级负载阻抗控制模式,当摄像头感知评价指标j满足γ3≤j<γ2时,所述摄像头式电磁主动悬架执行单元执行三级负载阻抗控制模式,当摄像头感知评价指标j满足0≤j<γ3时,所述摄像头式电磁主动悬架执行单元不执行工作;
6、所述摄像头式电磁主动悬架执行单元执行一级负载阻抗控制模式时,摄像头式电磁主动悬架输出阻尼力f1其值取决于旋转电机内部电阻rc0、一级负载阻抗控制模式下负载电阻rl1、一级负载阻抗控制模式下旋转电机电动势常数ke1、一级负载阻抗控制模式下旋转电机产生的扭矩tm1、一级负载阻抗控制模式下旋转电机转速nm1、旋转电机额定转速n0、一级负载阻抗控制模式下悬架簧上与簧下之间相对速度v1、一级负载阻抗控制模式下旋转电机外置回路电流ie1、滚珠丝杠导程l0、一级负载阻抗控制模式下旋转电机影响系数β1、一级负载阻抗控制模式下滚珠丝杠影响系数β2;设计一级负载阻抗控制评价因子η1用于评价一级负载阻抗控制模式下摄像头式电磁主动悬架控制的程度,其值取决于一级负载阻抗控制模式的执行时间t1、一级负载阻抗控制模式下旋转电机产生的电动势ve1;设计一级负载阻抗控制判断因子λ1和一级负载阻抗控制再判断时间t1,且λ1min<λ1<λ1max,其中λ1min为一级负载阻抗控制判断因子下阈值,λ1max为一级负载阻抗控制判断因子上阈值,根据一级负载阻抗控制评价因子η1的大小对车辆进行相应的规则调整;
7、所述摄像头式电磁主动悬架执行单元执行二级负载阻抗控制模式时,摄像头式电磁主动悬架输出阻尼力f2其值取决于旋转电机内部电阻rc0、二级负载阻抗控制模式下负载电阻rl2、二级负载阻抗控制模式下旋转电机电动势常数ke2、二级负载阻抗控制模式下旋转电机产生的扭矩tm2、二级负载阻抗控制模式下旋转电机转速nm2、旋转电机额定转速n0、二级负载阻抗控制模式下悬架簧上与簧下之间相对速度v2、二级负载阻抗控制模式下旋转电机外置回路电流ie2、滚珠丝杠导程l0、二级负载阻抗控制模式下旋转电机影响系数β3、二级负载阻抗控制模式下滚珠丝杠影响系数β4;设计二级负载阻抗控制评价因子η2用于评价二级负载阻抗控制模式下摄像头式电磁主动悬架控制的程度,其值取决于二级负载阻抗控制模式的执行时间t2、二级负载阻抗控制模式下旋转电机产生的电动势ve2;设计二级负载阻抗控制判断因子λ2和二级负载阻抗控制再判断时间t2,且λ2min<λ2<λ2max,其中λ2min为二级负载阻抗控制判断因子下阈值,λ2max为二级负载阻抗控制判断因子上阈值,根据二级负载阻抗控制评价因子η2的大小对车辆进行相应的规则调整;
8、所述摄像头式电磁主动悬架执行单元执行三级负载阻抗控制模式时,摄像头式电磁主动悬架输出阻尼力f3其值取决于旋转电机内部电阻rc0、三级负载阻抗控制模式下负载电阻rl3、三级负载阻抗控制模式下旋转电机电动势常数ke3、三级负载阻抗控制模式下旋转电机产生的扭矩tm3、三级负载阻抗控制模式下旋转电机转速nm3、旋转电机额定转速n0、三级负载阻抗控制模式下悬架簧上与簧下之间相对速度v3、三级负载阻抗控制模式下旋转电机外置回路电流ie3、滚珠丝杠导程l0、三级负载阻抗控制模式下旋转电机影响系数β5、三级负载阻抗控制模式下滚珠丝杠影响系数β6;设计三级负载阻抗控制评价因子η3用于评价三级负载阻抗控制模式下摄像头式电磁主动悬架控制的程度,其值取决于三级负载阻抗控制模式的执行时间t3、三级负载阻抗控制模式下旋转电机产生的电动势ve3;设计三级负载阻抗控制判断因子λ3和三级负载阻抗控制再判断时间t3,且λ3min<λ3<λ3max,其中λ3min为三级负载阻抗控制判断因子下阈值,λ3max为三级负载阻抗控制判断因子上阈值,根据三级负载阻抗控制评价因子η3的大小对车辆进行相应的规则调整。
9、所述摄像头感知评价指标计算单元,根据以下公式可计算目标物坐标检测评价因子:
10、
11、其中,w1、w2为加权系数,n1为整车搭载前置摄像头个数,n2为整车搭载侧方前视摄像头个数,n3为整车搭载侧方后视摄像头个数,n4为整车搭载后置摄像头个数,k00为坐标转换评估因子,其值取决于车辆坐标系下前置摄像头检测目标物中心坐标(x01,y01,z01)、车辆坐标系下侧方前视摄像头检测目标物中心坐标(x02,y02,z02)、车辆坐标系下侧方后视摄像头检测目标物中心坐标(x03,y03,z03)、车辆坐标系下后置摄像头检测目标物中心坐标(x04,y04,z04),其表达式如下:
12、
13、其中,w3、w4、w5、w6为加权系数,车辆坐标系下前置摄像头检测目标物中心坐标(x01,y01,z01)可由前置摄像头坐标系下检测目标物中心坐标(x1,y1,z1)转换得到,转换表达式如下:
14、
15、其中,k1x为前置摄像头纵向坐标转换系数,k1y为前置摄像头横向坐标转换系数,k1z为前置摄像头垂向坐标转换系数;
16、车辆坐标系下侧方前视摄像头检测目标物中心坐标(x02,y02,z02)可由侧方前视摄像头坐标系下检测目标物中心坐标(x2,y2,z2)转换得到,转换表达式如下:
17、
18、其中,k2x为侧方前视摄像头纵向坐标转换系数,k2y为侧方前视摄像头横向坐标转换系数,k2z为侧方前视摄像头垂向坐标转换系数;
19、车辆坐标系下侧方后视摄像头检测目标物中心坐标(x03,y03,z03)可由侧方后视摄像头坐标系下检测目标物中心坐标(x3,y3,z3)转换得到,转换表达式如下:
20、
21、其中,k3x为侧方后视摄像头纵向坐标转换系数,k3y为侧方后视摄像头横向坐标转换系数,k3z为侧方后视摄像头垂向坐标转换系数;
22、车辆坐标系下后置摄像头检测目标物中心坐标(x04,y04,z04)可由后置摄像头坐标系下检测目标物中心坐标(x4,y4,z4)转换得到,转换表达式如下:
23、
24、其中,k4x为后置摄像头纵向坐标转换系数,k4y为后置摄像头横向坐标转换系数,k4z为后置摄像头垂向坐标转换系数。
25、所述摄像头感知评价指标计算单元,根据以下公式可计算运动探测距离和色彩分析评价因子:
26、
27、其中,w7、w8为加权系数,kl为探测距离综合系数,其表达式为:
28、
29、其中,w9、w10、w11、w12为加权系数,lx0max为前置摄像头的最大探测距离,lx0act为前置摄像头的实际探测距离,ly0max为侧方前视摄像头的最大探测距离,ly0act为侧方前视摄像头的实际探测距离,ly1max为侧方后视摄像头的最大探测距离,ly1act为侧方后视摄像头的实际探测距离,lx1max为后置摄像头的最大探测距离,lx1act为后置摄像头的实际探测距离;
30、krgb为色彩转换综合系数,其表达式为:
31、
32、其中,(r11,g11,b11)为人眼感应前置摄像头检测目标物的色彩三基色,(r22,g22,b22)为人眼感应侧方前视摄像头检测目标物的色彩三基色,(r33,g33,b33)为人眼感应侧方后视摄像头检测目标物的色彩三基色,(r44,g44,b44)为人眼感应后置摄像头检测目标物的色彩三基色,根据以下公式可获得人眼感应前置摄像头检测目标物的色彩三基色(r11,g11,b11):
33、(r11,g11,b11)t=q1(r1,g1,b1)t,
34、其中,(r1,g1,b1)为前置摄像头下感应目标物的色彩三基色,q1为前置摄像头色彩转换矩阵;
35、根据以下公式可获得人眼感应侧方前视摄像头检测目标物的色彩三基色(r22,g22,b22):
36、(r22,g22,b22)t=q2(r2,g2,b2)t,
37、其中,(r2,g2,b2)为侧方前视摄像头下感应目标物的色彩三基色,q2为侧方前视摄像头色彩转换矩阵;
38、根据以下公式可获得人眼感应侧方后视摄像头检测目标物的色彩三基色(r33,g33,b33):
39、(r33,g33,b33)t=q3(r3,g3,b3)t,
40、其中,(r3,g3,b3)为侧方后视摄像头下感应目标物的色彩三基色,q3为侧方后视摄像头色彩转换矩阵;
41、根据以下公式可获得人眼感应后置摄像头检测目标物的色彩三基色(r44,g44,b44):
42、(r44,g44,b44)t=q4(r4,g4,b4)t,
43、其中,(r4,g4,b4)为后置摄像头下感应目标物的色彩三基色,q4为后置摄像头色彩转换矩阵。
44、所述摄像头感知评价指标计算单元,根据以下公式可计算路面噪点检测评价因子:
45、
46、其中,w13、w14为加权系数,kl为路面检测抗干扰因子,τ为摄像头检测目标物的噪点值,n0为摄像头检测噪点个数,kl0为路况分类指数,其值取决于路面噪点评估阈值[n00,n01],若n0≤n00时,判断路面存在凹陷情况,取kl0=0.3,若n00<n0<n01时,判断路面相对平缓,取kl0=0.55,若n0≥n01时,判断路面存在凸起情况,取kl0=0.8,kτ为噪点检测系数,其值取决于检测噪点判断阈值[τ1,τ2],表达式如下:
47、
48、所述摄像头感知评价指标计算单元,根据以下公式可计算摄像头感知评价指标:
49、
50、其中,q1、q2、q3为单项指标计算加权值。
51、所述摄像头式电磁主动悬架控制模式选择单元包括一级负载阻抗控制模式、二级负载阻抗控制模式、三级负载阻抗控制模式,三级负载阻抗控制模式的控制强度高于二级负载阻抗控制模式,二级负载阻抗控制模式的控制强度高于一级负载阻抗控制模式,通过设计一级负载阻抗控制因子阈值γ1、二级负载阻抗控制因子阈值γ2、三级负载阻抗控制因子阈值γ3来描述控制模式的控制强度,其中,0<γ3<γ2<γ1<1。
52、当摄像头感知评价指标j满足γ1≤j<1时,所述摄像头式电磁主动悬架执行单元执行一级负载阻抗控制模式,摄像头式电磁主动悬架作动器由旋转电机与滚珠丝杠集成,摄像头式电磁主动悬架输出阻尼力表达式如下:
53、
54、其中,rc0为旋转电机内部电阻,rl1为一级负载阻抗控制模式下负载电阻,ke1为一级负载阻抗控制模式下旋转电机电动势常数,tm1为一级负载阻抗控制模式下旋转电机产生的扭矩,nm1为一级负载阻抗控制模式下旋转电机转速,n0为旋转电机额定转速,v1为一级负载阻抗控制模式下悬架簧上与簧下之间相对速度,ie1为一级负载阻抗控制模式下旋转电机外置回路电流,l0为滚珠丝杠导程,β1为一级负载阻抗控制模式下旋转电机影响系数,β2为一级负载阻抗控制模式下滚珠丝杠影响系数;
55、设计一级负载阻抗控制评价因子η1用于评价一级负载阻抗控制模式下摄像头式电磁主动悬架控制的程度,其表达式如下:
56、
57、其中,t1为一级负载阻抗控制模式的执行时间,ve1为一级负载阻抗控制模式下旋转电机产生的电动势;
58、设计一级负载阻抗控制判断因子λ1和一级负载阻抗控制再判断时间t1,且λ1min<λ1<λ1max,其中λ1min为一级负载阻抗控制判断因子下阈值,λ1max为一级负载阻抗控制判断因子上阈值,根据一级负载阻抗控制评价因子η1的大小对车辆进行相应的调整,调整规则如下:
59、当一级负载阻抗控制评价因子满足λ1≤η1≤λ1max时,判断摄像头式电磁主动悬架执行单元执行一级负载阻抗控制模式的效果良好,摄像头式电磁主动悬架控制仍正常执行,阻尼力仍正常输出;当一级负载阻抗控制评价因子满足η1>λ1max或λ1min≤η1<λ1时,判断摄像头式电磁主动悬架执行单元执行一级负载阻抗控制模式的效果较差,摄像头式电磁主动悬架控制暂时正常执行,控制系统持续t1s后再次判断η1是否满足λ1≤η1≤λ1max,若再次判断λ1≤η1≤λ1max,则摄像头式电磁主动悬架控制仍正常执行,阻尼力仍正常输出,若再次判断η1>λ1max或λ1min≤η1<λ1,则需要重新调整摄像头式电磁主动悬架的控制和阻尼力的输出。
60、当摄像头感知评价指标j满足γ2≤j<γ1时,所述摄像头式电磁主动悬架执行单元执行二级负载阻抗控制模式,摄像头式电磁主动悬架作动器由旋转电机与滚珠丝杠集成,摄像头式电磁主动悬架输出阻尼力表达式如下:
61、
62、其中,rc0为旋转电机内部电阻,rl2为二级负载阻抗控制模式下负载电阻,ke2为二级负载阻抗控制模式下旋转电机电动势常数,tm2为二级负载阻抗控制模式下旋转电机产生的扭矩,nm2为二级负载阻抗控制模式下旋转电机转速,n0为旋转电机额定转速,v2为二级负载阻抗控制模式下悬架簧上与簧下之间相对速度,ie2为二级负载阻抗控制模式下旋转电机外置回路电流,l0为滚珠丝杠导程,β3为二级负载阻抗控制模式下旋转电机影响系数,β4为二级负载阻抗控制模式下滚珠丝杠影响系数;
63、设计二级负载阻抗控制评价因子η2用于评价二级负载阻抗控制模式下摄像头式电磁主动悬架控制的程度,其表达式如下:
64、
65、其中,t2为二级负载阻抗控制模式的执行时间,ve2为二级负载阻抗控制模式下旋转电机产生的电动势;
66、设计二级负载阻抗控制判断因子λ2和二级负载阻抗控制再判断时间t2,且λ2min<λ2<λ2max,其中λ2min为二级负载阻抗控制判断因子下阈值,λ2max为二级负载阻抗控制判断因子上阈值,根据二级负载阻抗控制评价因子η2的大小对车辆进行相应的调整,调整规则如下:
67、当二级负载阻抗控制评价因子满足λ2≤η2≤λ2max时,判断摄像头式电磁主动悬架执行单元执行二级负载阻抗控制模式的效果良好,摄像头式电磁主动悬架控制仍正常执行,阻尼力仍正常输出;当二级负载阻抗控制评价因子满足η2>λ2max或λ2min≤η2<λ2时,判断摄像头式电磁主动悬架执行单元执行二级负载阻抗控制模式的效果较差,摄像头式电磁主动悬架控制暂时正常执行,控制系统持续t2 s后再次判断η2是否满足λ2≤η2≤λ2max,若再次判断λ2≤η2≤λ2max,则摄像头式电磁主动悬架控制仍正常执行,阻尼力仍正常输出,若再次判断η2>λ2max或λ2min≤η2<λ2,则需要重新调整摄像头式电磁主动悬架的控制和阻尼力的输出。
68、当摄像头感知评价指标j满足γ3≤j<γ2时,所述摄像头式电磁主动悬架执行单元执行三级负载阻抗控制模式,摄像头式电磁主动悬架作动器由旋转电机与滚珠丝杠集成,摄像头式电磁主动悬架输出阻尼力表达式如下:
69、
70、其中,rc0为旋转电机内部电阻,rl3为三级负载阻抗控制模式下负载电阻,ke3为三级负载阻抗控制模式下旋转电机电动势常数,tm3为三级负载阻抗控制模式下旋转电机产生的扭矩,nm3为三级负载阻抗控制模式下旋转电机转速,n0为旋转电机额定转速,v3为三级负载阻抗控制模式下悬架簧上与簧下之间相对速度,ie3为三级负载阻抗控制模式下旋转电机外置回路电流,l0为滚珠丝杠导程,β5为三级负载阻抗控制模式下旋转电机影响系数,β6为三级负载阻抗控制模式下滚珠丝杠影响系数;
71、设计三级负载阻抗控制评价因子η3用于评价三级负载阻抗控制模式下摄像头式电磁主动悬架控制的程度,其表达式如下:
72、
73、其中,t3为三级负载阻抗控制模式的执行时间,ve3为三级负载阻抗控制模式下旋转电机产生的电动势;
74、设计三级负载阻抗控制判断因子λ3和三级负载阻抗控制再判断时间t3,且λ3min<λ3<λ3max,其中λ3min为三级负载阻抗控制判断因子下阈值,λ3max为三级负载阻抗控制判断因子上阈值,根据三级负载阻抗控制评价因子η3的大小对车辆进行相应的调整,调整规则如下:
75、当三级负载阻抗控制评价因子满足λ3≤η3≤λ3max时,判断摄像头式电磁主动悬架执行单元执行三级负载阻抗控制模式的效果良好,摄像头式电磁主动悬架控制仍正常执行,阻尼力仍正常输出;当三级负载阻抗控制评价因子满足η3>λ3max或λ3min≤η3<λ3时,判断摄像头式电磁主动悬架执行单元执行三级负载阻抗控制模式的效果较差,摄像头式电磁主动悬架控制暂时正常执行,控制系统持续t3 s后再次判断η3是否满足λ3≤η3≤λ3max,若再次判断λ3≤η3≤λ3max,则摄像头式电磁主动悬架控制仍正常执行,阻尼力仍正常输出,若再次判断η3>λ3max或λ3min≤η3<λ3,则需要重新调整摄像头式电磁主动悬架的控制和阻尼力的输出。
76、当摄像头感知评价指标j满足0≤j<γ3时,所述摄像头式电磁主动悬架执行单元不执行工作。
77、与现有技术相比,本发明的有益效果:
78、1.一种基于摄像头式电磁主动悬架控制系统根据目标物坐标检测评价因子、运动探测距离和色彩分析评价因子、路面噪点检测评价因子,得到摄像头感知评价指标。
79、2.本发明的控制模式包括一级负载阻抗控制模式、二级负载阻抗控制模式、三级负载阻抗控制模式,三级负载阻抗控制模式的控制强度高于二级负载阻抗控制模式,二级负载阻抗控制模式的控制强度高于一级负载阻抗控制模式,通过设计一级负载阻抗控制因子阈值、二级负载阻抗控制因子阈值、三级负载阻抗控制因子阈值来描述控制模式的控制强度。
80、3.根据不同的控制模式,计算出不同模式下的摄像头式电磁主动悬架输出阻尼力,通过设计不同控制模式的评价因子用于评价不同控制模式的摄像头式电磁主动悬架控制的程度,从而对车辆控制进行相应规则调整。
- 还没有人留言评论。精彩留言会获得点赞!