一种扭矩估算方法、装置及汽车与流程
本技术涉及电机控制的,尤其涉及一种扭矩估算方法、装置及汽车。
背景技术:
1、随着新能源汽车的快速大量普及,随之而来的安全问题也越来越突出。对于纯电动汽车而言,主驱电机是唯一的转矩输出装置。驱动电机的转矩输出异常可能导致车辆非预期加速或者非预期减速,从而有可能导致车祸的发生,存在很大的安全隐患。因此为了保证安全需要对电机输出转矩进行安全监控。
2、目前大部分具有实际输出转矩功能且满足功能安全要求的电机控制器,实现功能安全中转矩安全的方法是将电机的输出转矩与整车控制器请求转矩进行对比,在一定范围内认为输出正常,否则认为发生影响安全的异常。在主驱系统上面不具备扭矩传感器,因此需要对实际输出转矩通过算法进行估算。但是现有的扭矩估算方法的精度不高,很容易导致车辆非预期的关断,非预期的关断后,车辆需要重启才能运行,用户体验很不好。
技术实现思路
1、本技术提供了一种扭矩估算方法、装置及汽车,可提高对车辆实际输出扭矩的估算精度,从而减少非预期关断的车辆工况出现,以进一步保障驾乘安全。
2、第一方面,本技术实施例提供了一种扭矩估算方法,该方法包括:
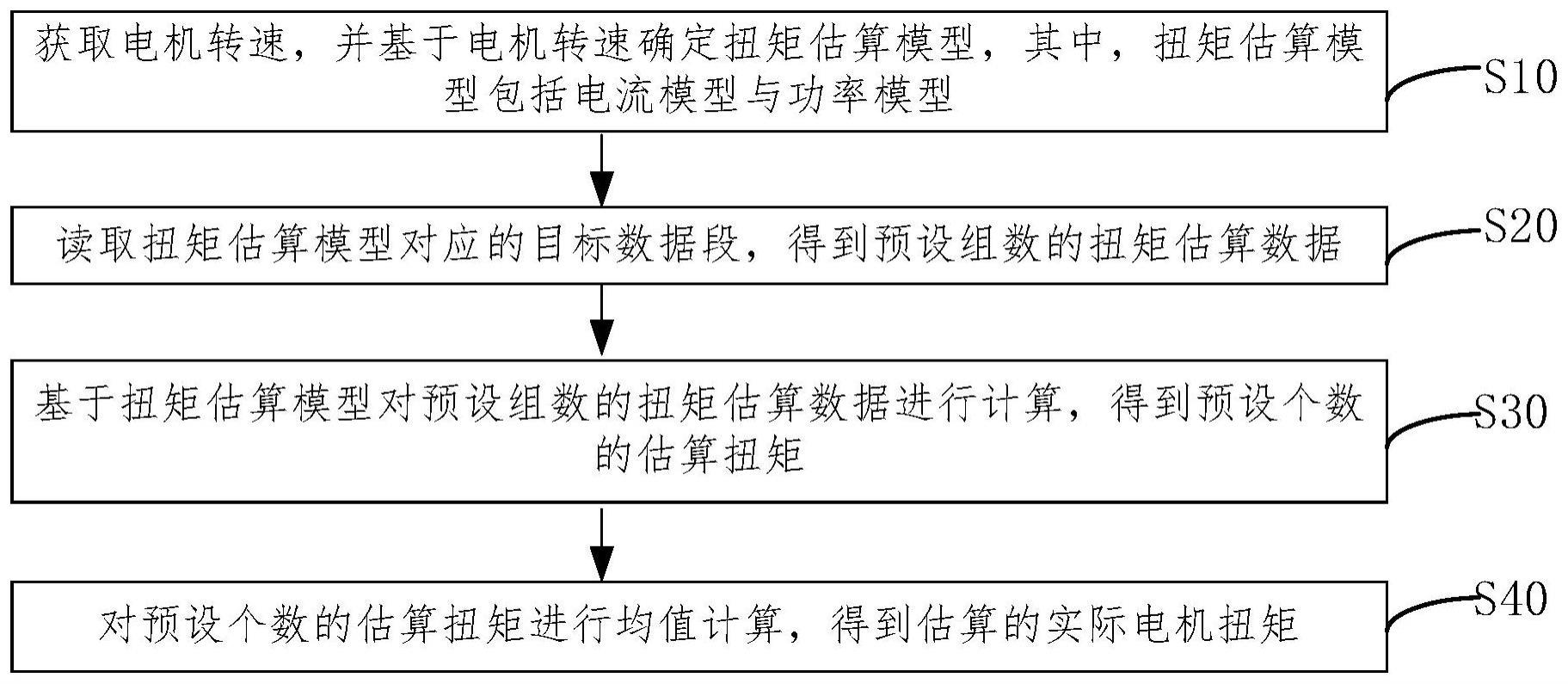
3、获取电机转速,并基于电机转速确定扭矩估算模型,其中,扭矩估算模型包括电流模型与功率模型;
4、读取扭矩估算模型对应的目标数据段,得到预设组数的扭矩估算数据;
5、基于扭矩估算模型对预设组数的扭矩估算数据进行计算,得到预设个数的估算扭矩;
6、对预设个数的估算扭矩进行均值计算,得到估算的实际电机扭矩。
7、进一步的,所述基于电机转速确定扭矩估算模型的步骤包括:
8、确定电机转速所处的预设数值范围;
9、当确定电机转速处于第一预设数值范围内,则扭矩估算模型为电流模型;
10、当确定电机转速处于第二预设数值范围内,则扭矩估算模型为电流模型与功率模型,其中,第二预设数值范围的下限值大于第一预设数值范围的上限值;
11、当确定电机转速处于第三预设数值范围内,则扭矩估算模型为功率模型,其中,第三预设数值范围的下限值大于第二预设数值范围的上限值。
12、进一步的,在所述获取电机转速,并基于电机转速确定扭矩估算模型的步骤之前包括:
13、基于所采集的电机旋转变压器的正余弦信号进行计算,得到电机转子的位置数据;
14、基于电机转子的位置数据计算确定电机转速。
15、进一步的,在所述读取扭矩估算模型对应的目标数据段,得到预设组数的扭矩估算数据的步骤之前包括:
16、以预设周期将电机的三相电流值、电机旋转变压器的正余弦数据作为一组数据,按序存储在电流模型对应的目标数据段中;
17、以预设周期将电机的三相电流值、电机旋转变压器的正余弦数据、电机控制器直流母线的电压值以及电机三相桥臂开关状态数据作为一组数据,按序存储在功率模型对应的目标数据段中。
18、进一步的,所述扭矩估算模型对应的目标数据段的长度大小至少为预设组数的双倍。
19、进一步的,所述读取扭矩估算模型对应的目标数据段,得到预设组数的扭矩估算数据的步骤包括:
20、按序循环读取扭矩估算模型对应的目标数据段中的数据,并在读取每组扭矩估算数据时,将数据索引值加一;
21、当数据索引值达到预设阈值时,得到预设组数的扭矩估算数据,并输出循环结束的标志位,清零数据索引值。
22、进一步的,当扭矩估算模型为电流模型时,所述基于扭矩估算模型对预设组数的扭矩估算数据进行计算,得到预设个数的估算扭矩的步骤包括:
23、基于每组扭矩估算数据中的电机旋转变压器的正余弦数据计算确定电机转子的位置数据;
24、基于每组扭矩估算数据中的电机的三相电流值以及电机转子的位置数据进行计算,确定电机d轴和q轴上的实际控制电流值;
25、基于电机d轴和q轴上的实际控制电流值进行计算,得到电流矢量和其与电机转子旋转坐标系之间的夹角;
26、获取电机参数,基于电机参数、电流矢量及电流矢量与电机转子旋转坐标系之间的夹角进行计算,得到电机实际输出的电磁力矩;
27、基于电机转子的位置数据计算得到电机转速;
28、基于电机转速计算得到电机输出轴上的摩擦力矩;
29、基于电机实际输出的电磁力矩和电机输出轴上的摩擦力矩,得到每组扭矩估算数据对应的估算扭矩。
30、进一步的,当扭矩估算模型为功率模型时,所述基于扭矩估算模型对预设组数的扭矩估算数据进行计算,得到预设个数的估算扭矩的步骤包括:
31、基于每组扭矩估算数据中的电机控制器直流母线的电压值以及电机三相桥臂开关状态数据,计算得到重构出的三相电压值;
32、基于重构出的三相电压值与每组扭矩估算数据中的电机的三相电流值进行计算,得到电机控制器的输出功率;
33、基于每组扭矩估算数据中的电机旋转变压器的正余弦数据计算确定电机转子的位置数据;
34、基于电机转子的位置数据计算得到电机转速;
35、基于电机控制器的输出功率、系统效率以及电机转速,计算得到每组扭矩估算数据对应的估算扭矩。
36、第二方面,本发明还提供一种扭矩估算装置,所述扭矩估算装置包括:
37、模型确定模块,用于获取电机转速,并基于电机转速确定扭矩估算模型,其中,扭矩估算模型包括电流模型与功率模型;
38、数据读取模块,用于读取扭矩估算模型对应的目标数据段,得到预设组的扭矩估算数据;
39、第一扭矩计算模块,用于基于扭矩估算模型对预设组数的扭矩估算数据进行计算,得到预设个数的估算扭矩;
40、第二扭矩计算模块,用于对预设个数的估算扭矩进行均值计算,得到估算的实际电机扭矩。
41、进一步的,所述模型确定模块,还具体用于:
42、确定电机转速所处的预设数值范围;
43、当确定电机转速处于第一预设数值范围内,则扭矩估算模型为电流模型;
44、当确定电机转速处于第二预设数值范围内,则扭矩估算模型为电流模型与功率模型,其中,第二预设数值范围的下限值大于第一预设数值范围的上限值;
45、当确定电机转速处于第三预设数值范围内,则扭矩估算模型为功率模型,其中,第三预设数值范围的下限值大于第二预设数值范围的上限值。
46、进一步的,所述扭矩估算装置还包括转速计算模块,用于:
47、基于所采集的电机旋转变压器的正余弦信号进行计算,得到电机转子的位置数据;
48、基于电机转子的位置数据计算确定电机转速。
49、进一步的,所述扭矩估算装置还包括存储模块,用于:
50、以预设周期将电机的三相电流值、电机旋转变压器的正余弦数据作为一组数据,按序存储在电流模型对应的目标数据段中;
51、以预设周期将电机的三相电流值、电机旋转变压器的正余弦数据、电机控制器直流母线的电压值以及电机三相桥臂开关状态数据作为一组数据,按序存储在功率模型对应的目标数据段中。
52、进一步的,所述扭矩估算模型对应的目标数据段的长度大小至少为预设组数的双倍。
53、进一步的,所述数据读取模块,还具体用于:
54、按序循环读取扭矩估算模型对应的目标数据段中的数据,并在读取每组扭矩估算数据时,将数据索引值加一;
55、当数据索引值达到预设阈值时,得到预设组数的扭矩估算数据,并输出循环结束的标志位,清零数据索引值。
56、进一步的,当扭矩估算模型为电流模型时,所述第一扭矩计算模块,还具体用于:
57、基于每组扭矩估算数据中的电机旋转变压器的正余弦数据计算确定电机转子的位置数据;
58、基于每组扭矩估算数据中的电机的三相电流值以及电机转子的位置数据进行计算,确定电机d轴和q轴上的实际控制电流值;
59、基于电机d轴和q轴上的实际控制电流值进行计算,得到电流矢量和其与电机转子旋转坐标系之间的夹角;
60、获取电机参数,基于电机参数、电流矢量及电流矢量与电机转子旋转坐标系之间的夹角进行计算,得到电机实际输出的电磁力矩;
61、基于电机转子的位置数据计算得到电机转速;
62、基于电机转速计算得到电机输出轴上的摩擦力矩;
63、基于电机实际输出的电磁力矩和电机输出轴上的摩擦力矩,得到每组扭矩估算数据对应的估算扭矩。
64、进一步的,当扭矩估算模型为功率模型时,所述第二扭矩计算模块,还具体用于:
65、基于每组扭矩估算数据中的电机控制器直流母线的电压值以及电机三相桥臂开关状态数据,计算得到重构出的三相电压值;
66、基于重构出的三相电压值与每组扭矩估算数据中的电机的三相电流值进行计算,得到电机控制器的输出功率;
67、基于每组扭矩估算数据中的电机旋转变压器的正余弦数据计算确定电机转子的位置数据;
68、基于电机转子的位置数据计算得到电机转速;
69、基于电机控制器的输出功率、系统效率以及电机转速,计算得到每组扭矩估算数据对应的估算扭矩。
70、第三方面,本发明还提供一种汽车,所述汽车包括处理器,存储器,存储于所述存储器上并可在所述处理器上运行的扭矩估算程序,所述处理器执行所述扭矩估算程序时实现如上述所述的扭矩估算方法的步骤。
71、综上,与现有技术相比,本技术实施例提供的技术方案带来的有益效果至少包括:
72、本技术实施例提供的一种扭矩估算方法、装置及汽车,对每个扭矩估算模型设置包括若干组扭矩估算数据的数据段,在基于电机转速所处的不同范围确定需要进行扭矩估算的模型保障扭矩估算精度的基础上,通过读取并计算模型对应目标数据段的预设组扭矩估算数据,可得到预设个数的估算扭矩并进行均值计算,得到精度更高的实际电机扭矩,通过本技术可以提高对车辆实际输出扭矩的估算精度,从而减少由于估算扭矩精度不高导致非预期关断的车辆工况出现,以进一步保障驾乘安全。
- 还没有人留言评论。精彩留言会获得点赞!