船用集装箱电池平台的输送系统及其操作方法与流程
本发明涉及船用箱式电池平台输送,具体为一种船用集装箱电池平台输送系统及其操作方法。
背景技术:
1、伴随着世界范围内的能源紧缺及环保要求,环保节能的集装箱电池平台已成为船舶动力领域的发展方向。但采用电动拖头输送集装箱电池过程中,还存在一定限制,包括现有车辆与电池平台连接结构柔性不足,自动化程度不高,不能满足船用码头空间场地狭窄、掉头困难等问题,影响拖头的使用效率。
2、为解决上述技术问题,现有技术提出了为电动车辆更换电池的方案。在更换电池的方案中,存在如下几个突出问题。申请号为cn201920721103.5、名称为:一种用于连接铁路车辆的车钩中的连接器的中国专利申请中提出采用车钩连接,车钩作为车辆的关键部件,其对车辆的动力学性能和运行品质有着重要的影响。但是车钩是刚性连接,缓冲性能很差。也有的车钩具有缓冲结构,但在刚度调节方面较单一,缺少变刚度,难以满足车辆在大载荷下,以较小的刚度启动具备良好的缓冲性能。申请号为cn201710300002.6、名称为:移动更换电池的方法和装置的中国专利申请中提出一种航母式移动更换电池车,其有助于提升换电服务效率,但是该专利没有给出快速连接结构和快速固定结构。综上所述,最终归纳存在如下问题:1)传统车钩连接,在连接具有驾驶室的前部车体和具有载货台等的后部车体的连接车辆中,柔性不足,缓冲性能差,刚度调节方面较单一;2)人工操作,费时费力,不能实现车头与电池平台自动、快速连接和固定。
技术实现思路
1、本发明所要解决的技术问题是:提供一种自动化程度高的船用集装箱电池平台输送系统。
2、为解决上述技术问题,本发明所采用的技术方案为:一种电池平台输送系统包括电动拖头、连接装置、电池平台、传感组件和控制系统;电动拖头与电池平台通过连接装置实现自动连接和分离;
3、电动拖头后部固定安装有控制系统、电动拖头后上方端部设有摄像头、电动拖头后下方端部设有与连接装置连接的机械接口,摄像头用于协助电动拖头和电池平台进行对接;连接装置的一端与电动拖头后下方端部的机械接口连接,连接装置的另一端与电池平台前部下方端部的机械接口连接,连接装置具有使电动拖头与电池平台快速接入、锁紧和脱离的作用;电池平台包括电池箱及组件和定位承载板,定位承载板用于电池箱及组件的放置定位和承载性;控制系统设有分析计算模块、交互模块和显示设备,用于电动拖头和电池平台的自动、快速接入、锁紧和脱离过程控制和信息显示;
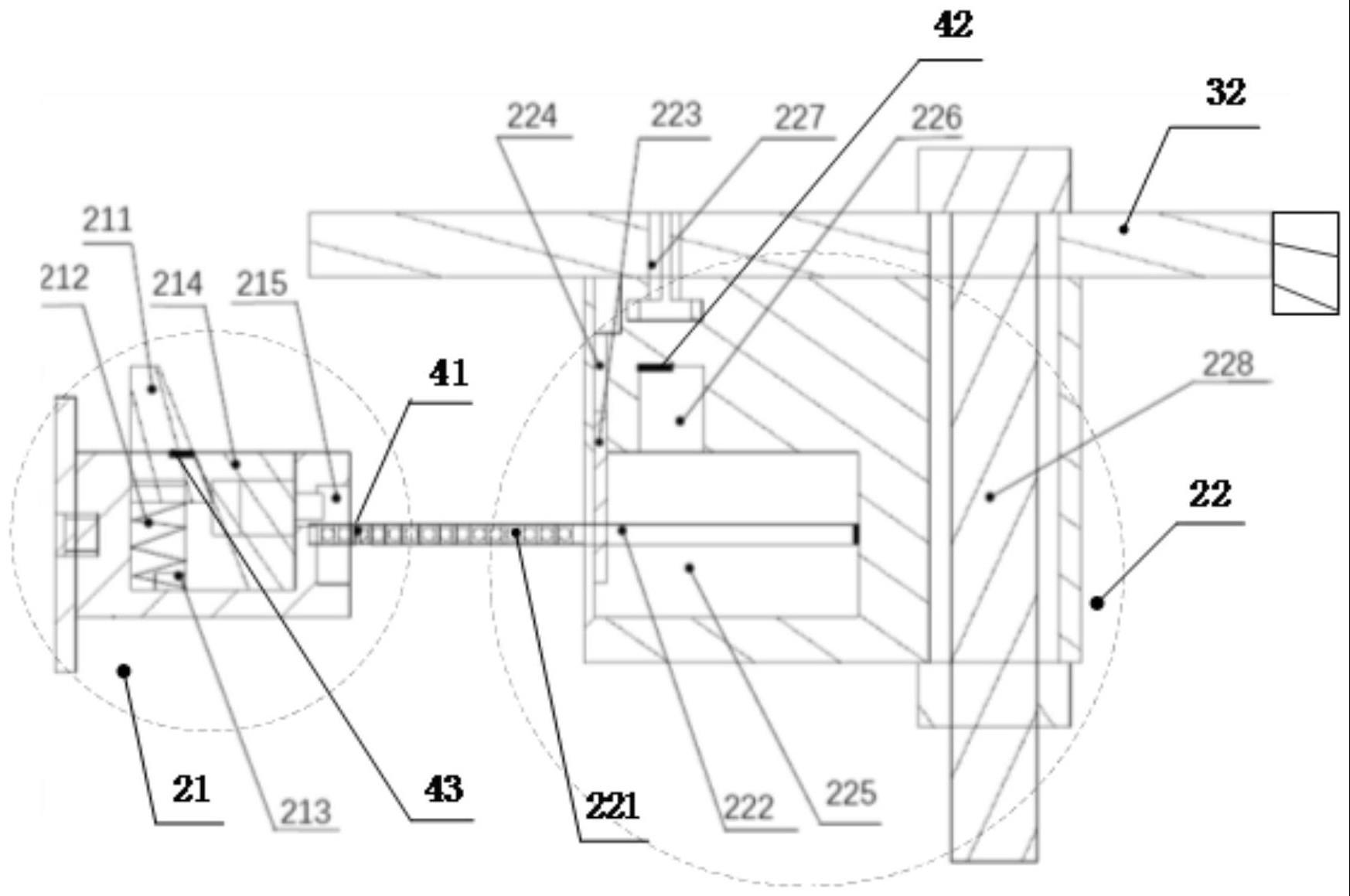
4、所述连接装置包括与电动拖头后下方端部的机械接口连接的接入组件和与电池平台前部下方端部的机械接口连接的锁紧组件;
5、接入组件包括与电动拖头后下方端部的机械接口连接的接入本体,接入本体中设有上部开口的弹性体仓,锁定销与弹性体上部固定连接,弹性体下部与设置在接入本体的弹性体仓底部固定连接,锁定销位于远离电动拖头的侧面为斜面且从上往下向远离电动拖头方向倾斜;
6、压销块活动设于弹性体仓中锁定销远离电动拖头的一侧,压销块正对电动拖头的侧面为与锁定销远离电动拖头的侧面相同斜度的斜面;电推缸设有固定行程,电推缸215带动压销块向锁定销移动将锁定销压下,从而用于接入组件和锁紧组件分离;
7、锁紧组件包括转动设置在定位承载板上的锁紧本体,锁紧本体上设有侧向开口以容置接入组件的接入本体的接插槽,锁紧本体上在接插槽槽口处活动设有阻隔板以及驱动阻隔板挡住或避开接插槽槽口的电推缸;锁紧本体上在接插槽上方设有与接插槽贯通并与锁紧销相配合的锁紧槽;
8、传感器组件包括通过信号线与控制系统相连的压力传感器、位置传感器,压力传感器设置于锁紧槽顶部,位置传感器设于压销块伸出位置处。
9、作为一种优选的方案,记实施电动拖头与电池平台连接时电动拖头通过连接装置施加给电池平台的水平作用力为f,锁定销连接的弹性体可被压缩量为h,锁定销倾斜面与水平方向的夹角为β;电动拖头与电池平台接插过程中水平作用力为f需满足以下合集:
10、
11、其中,fp为导向柱上滚动体的滚动阻力,f为导向柱上滚动体滚动阻力系数,w为电池平台的总重量;k为弹性体弹性刚度,fμ为压销块与锁定销斜面的摩擦力。
12、作为一种优选的方案,所述锁紧组件的锁紧本体上固定设有一对水平导轨,水平导轨上活动设有拉出后对接入组件的接入本体进行导向的导向柱,导向柱内侧面设有滚珠导向滑槽,滚珠导向滑槽内嵌若干滚动体。
13、作为一种优选的方案,所述接入组件的接入本体的两侧分别设有与滚动体相配合的滚珠导向滑槽。
14、作为一种优选的方案,所述传感器组件还包括通过信号线与控制系统相连的触觉传感器,触觉传感器设置于一个导向柱端部内侧。
15、作为一种优选的方案,所述接入组件的接入本体上设有水平设置的导向槽,压销块通过其上设置的连接件活动卡接导向槽中。
16、作为一种优选的方案,所述定位承载板的上设有竖向布置的转轴,所述锁紧组件的锁紧本体活动套设在转轴上,定位承载板的上设有上下贯通的圆弧形导槽,且圆弧形导槽的圆心与设置在锁紧组件的锁紧本体上的转轴中心一致,旋转导向件位于锁紧组件的锁紧本体上,旋转导向件的上部伸入圆弧形导槽中。
17、本发明所要解决的另一个技术问题是:提供一种上述船用集装箱电池平台输送系统的操作方法。
18、为解决上述技术问题,本发明所采用的技术方案为:一种船用集装箱电池平台输送系统的操作方法,包括如下步骤:
19、步骤一:电动拖头与电池平台快速接入
20、s1:接入准备,拉出导向柱;启动电推缸,提升阻隔板,启动电动拖头;
21、s2:接入操作,使接入组件缓慢接近电池平台上的锁紧组件,并通过摄像头进行对齐定位;
22、s3:当触觉传感器发出定位准确信号时,继续操作电动拖头,使接入组件沿导向柱通过接插槽逐渐移近锁紧槽;
23、s4:当控制系统接受到锁定销触发的压力传感器的接入信号时,停止接入操作;
24、s5:操作电动拖头,拖动电池平台至目的地;
25、s6:卸下电池箱及组件;
26、步骤二:电动拖头与电池平台快速分离
27、step1:启动电推缸,到达指定行程;
28、step2:控制系统接收到压销块触发的位置传感器信号,电推缸停止运动;
29、step3:操作电动拖头移出接入组件;
30、step4:当控制系统接受到触觉传感器信号时,接入组件与锁紧组件分离,即电动拖头与电池平台快速分离;
31、step5:控制电推缸,放下阻隔板,收回导向柱;
32、步骤三:将电动拖头放置在指定位置,关闭电源;
33、步骤四:结束。
34、本发明的有益效果是:
35、本系统使得电动拖头与电池平台快速连接装置,定位精度高、连接效率高,缓冲性能好,刚度调节方便,降低了加工难度且保证运输过程的稳定性;
36、本系统采用自动接入、定位、锁紧于一体的电动拖头与电池平台快速连接装置,柔性高,可以同时做到电动拖头与电池平台快速连接和固定;且通过传感组件给与信息提示和操作约束,提高系统工作可靠性和安全性;
37、本系统由于连接装置分为接入组件和锁紧组件两部分结构,分别安装在电动拖头与电池平台上,保证电动拖头和电池平台两者的一对多关系,满足电池平台使用、维护要求,同时使用和维护降低成本。
- 还没有人留言评论。精彩留言会获得点赞!