一种车辆及其弯道制动控制方法、系统
本发明属于汽车制动安全,具体涉及一种车辆及其弯道制动控制方法、系统。
背景技术:
1、车辆弯道自动紧急制动控制是指车辆遇到在弯道场景下,自车与目标车辆(即前车)之间存在碰撞风险时,主动进行刹车来保证车辆的运行安全问题。而现有的判断存在碰撞风险的方法通常是基于碰撞时间模型确定的,即运用碰撞时间模型预测自车与目标车辆的碰撞时间,并在碰撞时间小于(或不超过)安全时间阈值时,对车辆进行主动制动。而碰撞时间模型是通过获取自车与目标车辆之间的距离与自车与目标车辆的速度差值,以通过距离与速度差值的比值来预测自车与目标车辆的碰撞时间,因此在自车的车速与目标车辆的车速的相同(或趋近相同时),则基于此碰撞模型获取的结果趋近于无穷,因此在此情况下不会主动触发紧急制动过程,但是此情况下依旧存在两车碰撞的风险,例如若自车车速总比目标车辆的车速快且趋近相同的情况下,自车与目标车辆会发生碰撞,所以该基于距离与速度差值的比值来预测自车与目标车辆的碰撞时间存在预测碰撞时间难以计算,使得到的碰撞时间不准确的问题。并且该碰撞时间模型中的自车与目标车辆的距离通常是两车之间的直线距离,而在车辆处于弯道时,直线距离小于实际距离,因此基于该直线距离与速度差的比值,预测的自车与目标车辆的碰撞时间,存在预测的碰撞时间小于实际的碰撞时间的问题,进而基于该预测的碰撞时间,导致紧急制动装置过早制动的误动作情况。
技术实现思路
1、本发明的目的在于提供一种车辆及其弯道制动控制方法、系统,用以解决现有基于碰撞时间模型对车辆进行制动控制时,存在预测的碰撞时间不准确导致车辆存在碰撞时无制动或车辆未存在碰撞风险时提前制动的问题。
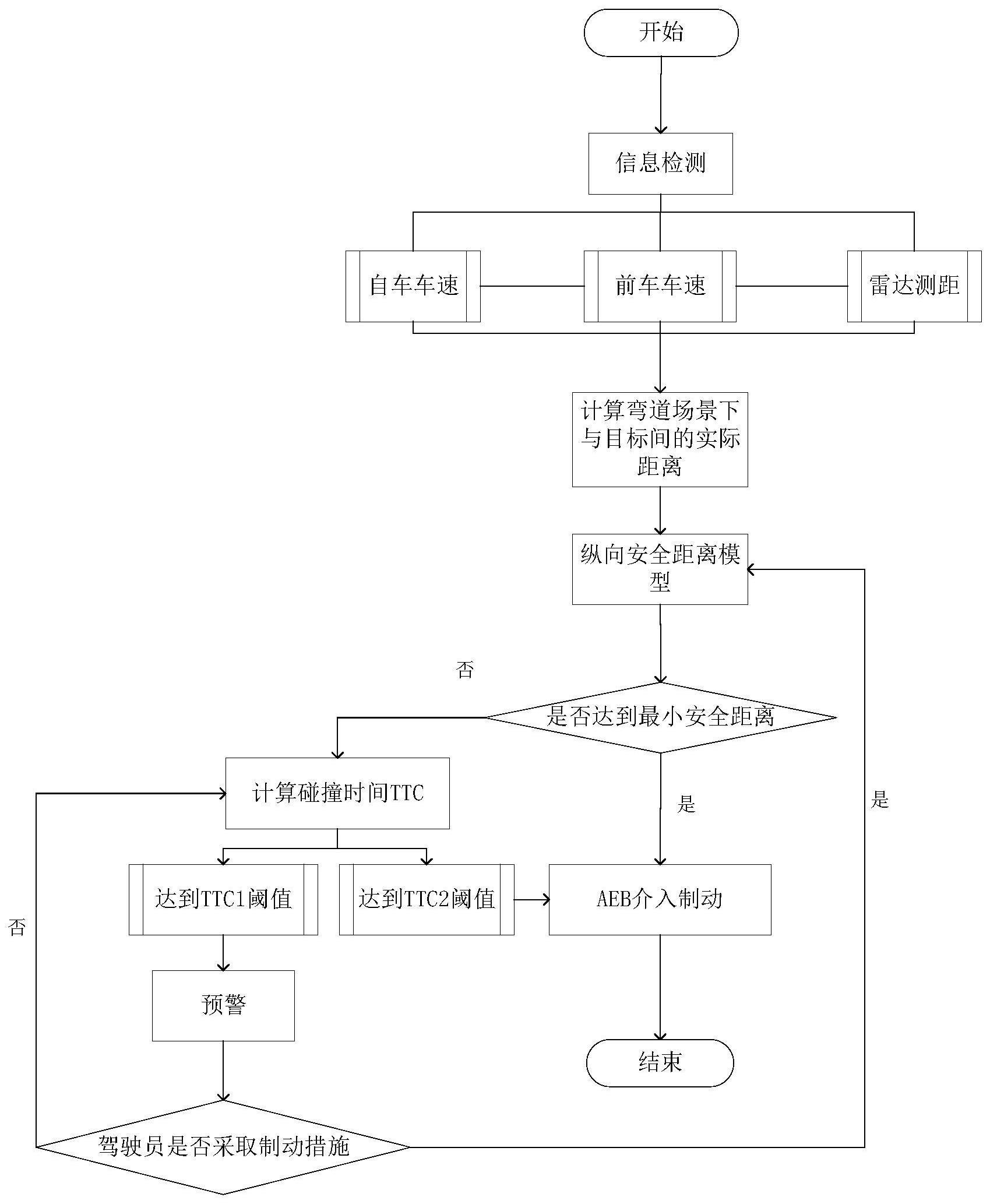
2、为解决上述技术问题,本发明提供了一种车辆弯道制动控制方法,包括如下步骤:
3、1)在车辆处于弯道行驶时,根据车辆的自车的转弯半径以及自车与前车之间的圆心角计算得到自车行驶路径方向中的两车实际距离;
4、2)根据两车实际距离、前车的前车运行信息以及自车的自车运行信息,运用安全距离模型获取自车与前车的实际碰撞时间;
5、3)若两车实际距离小于预设的安全距离或实际碰撞时间小于预设第二碰撞时间时,则控制自车进行主动制动。
6、其有益效果为:本发明中不仅运用碰撞时间来判断车辆是否达到需要制动的条件,还通过自车与前车之间的距离来判断是否达到需要制动的条件,因此即使存在两车车速相近导致碰撞时间无法准确确定的情况时,也能够通过两车实际距离小于预设的安全距离来确定是否需要对车辆进行紧急制动,因此本发明通过结合碰撞时间和两车的实际距离来对车辆是否需要进入紧急制动的判断过程,保证了即使在两车车速相同(或趋近于相同)存在碰撞风险时,也能够运用两车实际距离为依据实现对车辆的制动过程,因此避免了存在碰撞风险而无制动的问题。并且本发明中是运用两车实际距离作为距离判断以及碰撞时间计算的依据,此实际距离是以自车的实际运行方向上与前车的距离,因此该距离相较于两车的直线距离反应的是更为准确的两车实际相距距离,因此基于此实际距离得到的两车碰撞时间更为准确,避免了由于采用直线距离得到的碰撞时间不准确导致无碰撞风险时误制动的问题。本发明中基于获取的转弯半径以及圆心角来得到两车的实际距离,其中自车与前车之间的圆心角为自车所在位置处的转弯半径与前车所在位置处转弯半径至今的夹角,基于此夹角与自车的转弯半径能够准确确定自车与前车之间的弧线距离(即实际距离),因此基于此准确确定的两车之间实际距离进行距离判断或计算碰撞时间的结果更为准确。
7、进一步地,步骤1)中,所述自车的转弯半径根据自车速度与自车横摆角速度的比值获取。
8、本发明中通过运用能够直接获取的数据(即自车速度与自车横摆角速度),以及该数据与自车转弯半径的对应关系(即自车转弯半径=自车速度÷自车横摆角速度),能够准确获取自车的转弯半径,进而基于此转弯半径得到的实际距离更为准确。
9、进一步地,自车横摆角速度通过车载传感器直接获取,或通过车载传感器获取的自车速度以及自车加速度计算得到自车横摆角速度。
10、本发明中考虑到若车载传感器中存在能够获取自车横摆角速度的传感器时,自车横摆角速度能够通过车载传感器直接获取,也能够在车载传感器中无直接获取自车横摆角速度的传感器时基于车载传感器获取的其他数据计算得到,而车载传感器中均会存在获取自车速度以及自车加速度的传感器,因此本发明中通过以自车速度与自车加速度计算得到与自车横摆角速度,此自车横横摆角速度与自车速度以及自车加速度的对应关系为:自车横摆角速度=自车加速度÷自车速度,因此基于获取的自车加速度与自车速度能够准确得到自车横摆角速度。
11、进一步地,步骤1)中,自车行驶路径方向中的两车实际距离s的计算公式为:其中θ为自车与前车之间的圆心角,ra为自车的转弯半径。
12、本发明中通过运用圆弧的计算公式,来得到自车行驶路径方向中的两车实际距离,即以自车的转弯半径为圆弧的半径,以自车与前车之间的圆心角为圆弧对应的夹角,因此基于这两个数据运用圆弧的计算公式能够准确得到圆弧长度,而该圆弧长度即为本发明中所需要的自车行驶路径方向中的两车实际距离。
13、进一步地,步骤3)中,所述安全距离模型为s=sego+sstop-straget,其中s为两车实际距离,sego为自车在设定时间段内的运行距离,straget为前车在设定时间段内的运行距离,sstop为该设定时间段后自车与前车之间的距离;sego根据车辆的自车运行信息计算得到,straget根据前车的前车运行信息计算得到。
14、本发明中的安全距离模型包括两车实际距离s、自车在设定时间段内的运行距离sego、前车在设定时间段内的运行距离straget以及该设定时间段后自车与前车之间的距离sstop这四个参数,而其中三个参数(sego、straget以及s)在该设定时间段前后均能计算得到,因此该安全距离模型能够获取该设定时间段后前车之间的距离sstop,因为基于在此时间段内两车的距离由s至sstop的过程,能够预测到由sstop至0时的时间(即碰撞时间)。
15、进一步地,自车与前车的实际碰撞时间通过安全距离模型计算得到设定时间段后自车与前车之间的距离,根据自车与前车之间的实际距离、设定时间段后自车与前车之间的距离、自车运行信息以及前车运行信息,预测得到自车与前车之间的碰撞时间。
16、本发明中通过安全距离模型能够获取该设定时间段后前车之间的距离sstop,因为基于在此时间段内两车的距离由s至sstop的过程,以及在两车实际距离为sstop情况下获取的自车运行信息以及前车运行信息,能够预测到由sstop至0时的时间(即碰撞时间)。
17、进一步地,自车与前车的实际碰撞时间ttc的预测公式包括:
18、若ar=0时,ttc=(s-sstop)vr-1;
19、若ar≠0时,
20、其中,ar为自车与前车的加速度差,vr为自车与前车的速度差。
21、即本发明预测到由sstop至0时的时间(即碰撞时间)的方式为:通过运用自车运行信息中的加速度与前车运行信息中的加速度的差值得到自车与前车的加速度差,通过运用自车运行信息中的速度与前车运行信息中的速度的差值得到自车与前车的速度差,并基于得到的自车与前车之间的实际距离以及设定时间段后自车与前车之间的距离,运用上述公式得到。而上述公式中考虑到存在自车与前车速度相等(或趋近于相等)的情况(即ar=0的情况),因此在此情况下,运用另一公式预测碰撞时间,进而避免了在自车与前车速度相等(或趋近于相等)的情况下,得到的碰撞时间不准确的问题。
22、进一步地,步骤4)中,若两车实际距离不低于预设的安全距离且实际碰撞时间小于预设第一碰撞时间时,则控制自车告警;所述预设第一碰撞时间大于预设第二碰撞时间。
23、本发明的控制策略不仅有在影响车辆安全的情况下进行紧急制动的过程,还包括在预测到车辆接近于存在碰撞风险的情况下,通过警告的方式来提醒驾驶员做出相应反应来保证车辆的安全行驶过程,即本发明中通过将预设第一碰撞时间大于预设第二碰撞时间,在当预测到车辆的碰撞时间处于预设第二碰撞时间与预设第一碰撞时间之间时,通过发出告警信息的方式来提醒驾驶员对车辆进行相应的控制。
24、为解决上述技术问题,本发明还提供了一种车辆弯道制动控制系统,包括存储器以及处理器,处理器用于执行指令以实现上述介绍的车辆弯道制动控制方法步骤,并达到与该方法相同的有益效果。
25、为解决上述技术问题,本发明还提供了一种车辆,包括车载传感器以及控制装置,所述车载传感器用于获取车辆的自车运行信息以及前车的前车运行信息,并将获取的自车运行信息以及前车运行信息传输至控制装置,所述控制装置包括存储器以及处理器,处理器用于执行指令以实现上述介绍的车辆弯道制动控制方法步骤,并达到与该方法相同的有益效果。
- 还没有人留言评论。精彩留言会获得点赞!