车辆的制动控制方法、制动控制装置和车辆与流程
本发明涉及发动机控制领域,具体而言,涉及一种车辆的制动控制方法、制动控制装置、计算机可读存储介质和车辆。
背景技术:
1、排气制动和缸内制动作为辅助制动的方式,能够减少驾驶员通过制动踏板进行制动的时间,这样可以减少刹车片的工作量,提升特殊路况下车辆的安全性。通过驾驶员操作仪表盘上的制动按键来实现的,同时激活排气制动只需要满足配置排气蝶阀、排气门电磁阀,同时满足各种前置条件,如:无油门信号、传动系啮合等,即可进行制动。排气制动可通过缸内制动和排气蝶阀制动来实现,但是二者没有相互配合的关系,多是通过独立的请求实现制动效果,通常来说二级缸内制动最优、一级缸内制动效果次之,排气制动效果最轻。辅助制动的制动力有限,紧急情况下需要驾驶员通过刹车制动。
2、目前缸内制动与排气制动协调实现方案有以下几步,首先判断缸内制动与排气制动的实现的前置条件,如当前是否有踏板需求、制动阀是否配置以及是否出现故障等。前置条件满足之后,会根据制动请求的来源判断进入缸内制动或排气制动,同时根据相关请求状态计算出制动产生的制动力。
3、综上所述现有技术中的缸内制动与排气制动激活都是独立计算的,并不能根据当前路况和驾驶员驾驶风格,综合进行判定对缸内制动与排气制动进行激活,灵活调整制动扭矩。
技术实现思路
1、本技术的主要目的在于提供一种车辆的制动控制方法、制动控制装置、计算机可读存储介质和车辆,以至少解决现有技术中的制动方式不能根据驾驶员的驾驶习惯和当前路况灵活激活对应的制动方式为车辆提供适合的制动扭矩,导致驾驶舒适性较差的问题。
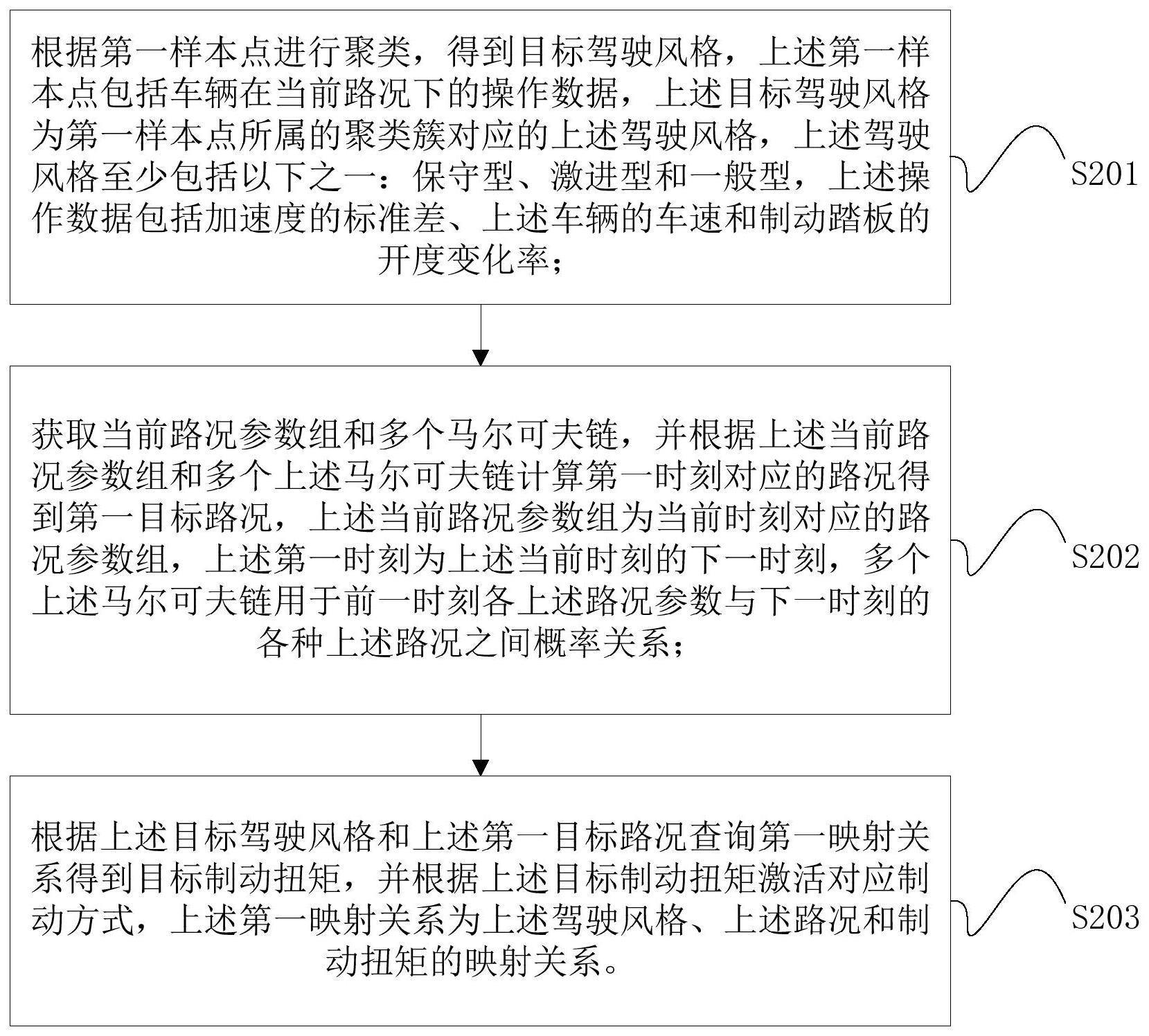
2、为了实现上述目的,根据本技术的一个方面,提供了一种车辆的制动控制方法,包括:根据第一样本点进行聚类,得到目标驾驶风格,所述第一样本点包括车辆在当前路况下的操作数据,所述目标驾驶风格为第一样本点所属的聚类簇对应的所述驾驶风格,所述驾驶风格至少包括以下之一:保守型、激进型和一般型,所述操作数据包括加速度的标准差、所述车辆的车速和制动踏板的开度变化率;获取当前路况参数组和多个马尔可夫链,并根据所述当前路况参数组和多个所述马尔可夫链计算第一时刻对应的路况得到第一目标路况,所述当前路况参数组为当前时刻对应的路况参数组,所述第一时刻为所述当前时刻的下一时刻,多个所述马尔可夫链用于前一时刻各所述路况参数与下一时刻的各种所述路况之间概率关系;根据所述目标驾驶风格和所述第一目标路况查询第一映射关系得到目标制动扭矩,并根据所述目标制动扭矩激活对应制动方式,所述第一映射关系为所述驾驶风格、所述路况和制动扭矩的映射关系。
3、可选地,根据第一样本点进行聚类,得到目标驾驶风格,包括:将所述第一样本点上传至云端,并获取预设质心组,所述预设质心组为云端根据历史质心组和所述第一样本点进行聚类得到的质心组,所述历史质心组为所述云端根据多个车辆的历史操作数据进行聚类得到的质心组,所述历史质心组中的历史质心与所述预设质心组中的预设质心一一对应,所述预设质心包括第一预设质心、第二预设质心和第三预设质心,所述第一预设质心为对应所述驾驶风格为所述保守型的所述聚类簇的聚类中心,所述第二预设质心为对应所述驾驶风格为所述激进型的所述聚类簇的聚类中心,所述第三预设质心为对应所述驾驶风格为所述一般型的所述聚类簇的聚类中心;根据所述第一样本点和各所述预设质心计算欧氏距离,得到多个第一距离;将所述第一距离最小值对应的所述质心确定为目标预设质心;将所述目标预设质心所属的聚类簇为目标聚类簇,所述目标聚类簇对应的所述驾驶风格确定为所述目标驾驶风格。
4、可选地,在获取当前路况参数组和多个马尔可夫链之前,所述方法还包括:获取多个历史路况参数组并根据各所述历史路况参数组查询第二映射关系得到多个第二目标路况,所述第二映射关系为所述历史路况参数组与所述路况之间的映射关系,多个所述历史路况参数组为预设时间段内间隔预设时长采集到的所述路况参数组,所述预设时间段的结束时刻为当前时刻;根据多个所述历史路况参数组和对应所述第二目标路况构建多个所述马尔可夫链。
5、可选地,根据多个所述历史路况参数组和对应所述第二目标路况构建多个所述马尔可夫链,包括:获取多个所述历史路况参数组并对所述历史路况参数组按照采集时间顺序进行排序,得到多个序列号,所述序列号与所述历史路况参数组一一对应;根据各所述车速、对应的所述第二目标路况和所述序列号,构建第一马尔可夫链,所述第一马尔可夫链用于描述前一时刻的所述车速与下一时刻的所述第二目标路况间的概率关系;根据各所述加速度、对应的所述第二目标路况和所述序列号,构建第二马尔可夫链,所述第二马尔可夫链用于描述前一时刻的所述加速度与下一时刻的所述第二目标路况间的概率关系;根据各所述坡度变化率、对应的所述第二目标路况和所述序列号,构建第三马尔可夫链,所述第三马尔可夫链用于描述前一时刻的所述坡度变化率与下一时刻的所述第二目标路况间的概率关系。
6、可选地,根据所述当前路况参数组和多个所述马尔可夫链计算第一时刻对应的路况得到第一目标路况,包括:分别将所述第一马尔可夫链、所述第二马尔可夫链和所述第三马尔可夫链以矩阵形式表示得到第一转移矩阵、第二转移矩阵和第三转移矩阵;将所述当前路况参数组中的所述车速代入所述第一转移矩阵得到多个第一概率,多个所述第一概率分别为所述当前时刻的所述车速下所述第一目标路况为各种所述路况的概率;将所述当前路况参数组中的所述加速度代入所述第二转移矩阵得到多个第二概率,多个所述第二概率分别为所述当前时刻的所述加速度下所述第一目标路况为各种所述路况的概率;将所述当前路况参数组中的所述坡度变化率代入所述第三转移矩阵得到多个第三概率,多个所述第三概率分别为所述当前时刻的所述坡度变化率下所述第一目标路况为各种所述路况的概率;根据多个所述第一概率和对应的所述路况、多个所述第二概率和对应的所述路况与多个所述第三概率和对应的所述路况进行期望计算,得到所述第一目标路况。
7、可选地,根据各所述车速、对应的所述第二目标路况和所述序列号,构建第一马尔可夫链,包括:划分步骤,根据各所述车速所在区间将所述车速划分为多个车速组,多个所述车速组至少包括第一车速组,第二车速组和第三车速组,所述第一车速组中的所述车速均大于所述第二车速组中的所述车速,所述第二车速组中的所述车速均大于所述第三车速组中的所述车速;第一统计步骤,获取任意一种所述路况对应的多个所述序列号的上一个所述序列号对应的多个所述车速,得到多个目标车速;第二统计步骤,根据各所述目标车速所在所述区间将所述目标车速划分为多个目标车速组,并计算所述目标车速组中所述目标车速的数量与对应所述车速组中的所述车速的数量的比值,得到多个目标比例,所述目标车速组与所述车速组一一对应;确定步骤,将所述目标比例确定为当所述车速处于对应所述区间时,所述车速对应的所述序列号的下一个所述序列号对应的所述第二目标路况为所述路况的概率;依次重复所述第一统计步骤、所述第二统计步骤和所述确定步骤至少一次,直至得到所有的所述车速对应的概率,所述车速对应的概率包括所述车速对应的所述序列号的下一个所述序列号对应的所述第二目标路况为各种所述路况的概率;根据各所述路况、对应的所述车速以及与所述车速对应的概率构建所述第一马尔可夫链。
8、可选地,根据所述目标制动扭矩激活对应制动方式,包括:根据所述目标制动扭矩查询第三映射关系得到目标制动方式,所述第三映射关系为所述制动扭矩和所述制动方式的映射关系,所述目标制动方式包括排气蝶阀制动、一级缸内制动和二级缸内制动中的至少一个;根据所述目标制动方式激活对应的所述制动方式。
9、根据本技术的另一方面,提供了一种车辆的制动控制装置,所述装置包括:聚类单元,用于根据第一样本点进行聚类,得到目标驾驶风格,所述第一样本点包括车辆在当前路况下的操作数据,所述目标驾驶风格为第一样本点所属的聚类簇对应的所述驾驶风格,所述驾驶风格至少包括以下之一:保守型、激进型和一般型,所述操作数据包括加速度的标准差、所述车辆的车速和制动踏板的开度变化率;第一获取单元,用于获取当前路况参数组和多个马尔可夫链,并根据所述当前路况参数组和多个所述马尔可夫链计算第一时刻对应的路况得到第一目标路况,所述当前路况参数组为当前时刻对应的路况参数组,所述第一时刻为所述当前时刻的下一时刻,多个所述马尔可夫链用于前一时刻各所述路况参数与下一时刻的各种所述路况之间概率关系;查询单元,用于根据所述目标驾驶风格和所述第一目标路况查询第一映射关系得到目标制动扭矩,并根据所述目标制动扭矩激活对应制动方式,所述第一映射关系为所述驾驶风格、所述路况和制动扭矩的映射关系。
10、根据本技术的再一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行任意一种所述的方法。
11、根据本技术的又一方面,提供了一种车辆,包括:一个或多个处理器,存储器,以及一个或多个程序,其中,所述一个或多个程序被存储在所述存储器中,并且被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行任意一种所述的方法。
12、应用本技术的技术方案,在上述车辆的制动控制方法中,首先,根据第一样本点进行聚类,得到目标驾驶风格,上述第一样本点包括车辆在当前路况下的操作数据,上述目标驾驶风格为第一样本点所属的聚类簇对应的上述驾驶风格,上述驾驶风格至少包括以下之一:保守型、激进型和一般型,上述操作数据包括加速度的标准差、上述车辆的车速和制动踏板的开度变化率;然后,获取当前路况参数组和多个马尔可夫链,并根据上述当前路况参数组和多个上述马尔可夫链计算第一时刻对应的路况得到第一目标路况,上述当前路况参数组为当前时刻对应的路况参数组,第一时刻为上述当前时刻的下一时刻,多个上述马尔可夫链用于前一时刻各上述路况参数与下一时刻的各种上述路况之间概率关系;最后,根据上述目标驾驶风格和上述第一目标路况查询第一映射关系得到目标制动扭矩,并根据上述目标制动扭矩激活对应制动方式,上述第一映射关系为上述驾驶风格、上述路况和制动扭矩的映射关系。本技术通过获取云端的质心点与和车辆当前操作数据对应的样本点进行聚类确定当前车辆的驾驶风格,通过预设时间段内的路况参数组构建马尔科夫链,进而计算下一时刻的路况参数,对未来路况进行预测,综合驾驶风格和路况综合判决确定驾驶舒适性最高的制动扭矩,进而根据制动扭矩需求,激活对应的制动方式进行制动,本技术解决了现有技术中的制动方式不能根据驾驶员的驾驶习惯和当前路况灵活激活对应的制动方式为车辆提供适合的制动扭矩,导致驾驶舒适性较差的问题。
- 还没有人留言评论。精彩留言会获得点赞!