基于被动驾驶机器人的刹车油门自适应控制系统及方法与流程
本发明属于智慧交通,涉及基于被动驾驶机器人的刹车油门自适应控制系统及方法。
背景技术:
1、由于城市交通的复杂性和多变性,传统的人工交通监管方式逐渐无法满足城市交通管理的需求,交管机器人在交通管理领域也逐渐成为一种趋势。作为一种新型的交通管理方式,交管机器人是具有高度灵活性的自动化机器,交管机器人最初的设计是为了解决城市交通管理中的一些问题,比如人力不足、管理疏漏等。随着科技的不断发展,越来越多种类和功能的交管机器人被广泛应用于交通管理领域,比如处理恶劣交通事故、高峰期交通拥堵疏导、交通指挥、临时信号灯功能、驾驶事故车辆,甚至应用于特警排爆、刑警缉毒、交警指挥、消防应急救援等多警种不同任务的多场景综合性使用。
2、作为交管机器人种类之一的具有被动驾驶功能的交管机器人,能够辅助甚至替代人类完成诸如驾驶危险事故车辆远离人群等危险、繁重、复杂的工作,有效地减少人类的危险,为人民群众的生产、生活、出行等方面提供更加安全、便利的服务。
3、交管机器人作为驾驶车辆功能使用时,机器人需要能够准确地确定车辆制动踏板和油门踏板的位置,以便于对车辆进行准确的控制。制动踏板和油门踏板的位置确定是对车辆实现准确驾驶控制的非常重要的一环,制动踏板和油门踏板是车辆行驶的关键部件,它们的位置决定了车辆的加速和减速性能。因此,准确地确定制动踏板和油门踏板的位置,对于驾驶机器人的安全和准确控制至关重要。
4、传统的制动踏板和油门踏板位置确定方法主要依赖于机械结构或简单的传感器,然而,在实际应用中,由于车辆的品牌、型号、使用时间等多种因素的不同,制动踏板和油门踏板的形状、大小、位置等都会有所不同,制动踏板和油门踏板的位置确定并不容易。
5、传统的驾驶机器人通常需要根据具体的车辆和使用环境进行手动调整和校准,这需要大量的人工干预和经验,当机器人需要将危险事故车辆急速驶离人群时,极可能由于人工的效率低下或者由于紧张等造成的人为误差,都难以保证机器人驾驶的准确性和安全性。
6、因此,一种实现存储和定位功能的驾驶机器人车辆制动踏板和油门踏板位置确定系统及方法,旨在解决传统方法中存在的精度低、响应慢、需要大量人工干预和经验等问题,实现更加准确、安全、高效的驾驶控制。
技术实现思路
1、本发明提供一种基于被动驾驶机器人的刹车油门自适应控制系统及方法,通过中央处理器对数据的处理和分析,使机器人的制动机械腿和油门机械腿能够快速、准确地确定制动踏板和油门踏板的位置,提高了定位控制精度,存储和记忆功能的存储介质,提高了制动踏板和油门踏板效率。
2、本发明的技术方案是这样实现的:
3、基于被动驾驶机器人的刹车油门自适应控制系统,包括
4、制动机械腿,位于机器人执行机构平台上,用于操纵车辆制动踏板,实现车辆制动控制;
5、油门机械腿,位于机器人执行机构平台上,用于操纵车辆油门踏板,实现车辆速度控制;
6、第一传感装置,位于所述制动机械腿的底部,用于确定车辆制动踏板位置;
7、第二传感装置,位于所述油门机械腿的底部,用于确定车辆油门踏板位置;
8、存储介质,用于存储中央处理器处理得到的制动踏板和油门踏板的位置信息。
9、中央处理器,用于控制机器人的制动机械腿和油门机械腿移动,查找车辆制动踏板和油门踏板位置;中央处理器还接收并处理来自第一传感装置和第二传感装置的信号,并按照预设的算法将信号转换为对应的制动踏板和油门踏板的位置信息;中央处理器还根据获取到的制动踏板和油门踏板位置信息控制制动机械腿和油门机械腿做出相应动作;
10、进一步的,所述第一传感装置包括若干个红外传感器,若干个所述红外传感器排列设置,所述第二传感装置与所述第一传感装置结构相同;
11、所述中央处理器控制所述制动机械腿和所述油门机械腿移动,所述第一传感装置和所述第二传感装置开启,所述中央处理器获取所述制动机械腿和所述油门机械腿移动轨迹的所述第一传感装置和所述第二传感装置的返回信号,按照所述存储介质的既定顺序进行数据存储,得到所述车辆制动踏板和所述车辆油门踏板的位置。
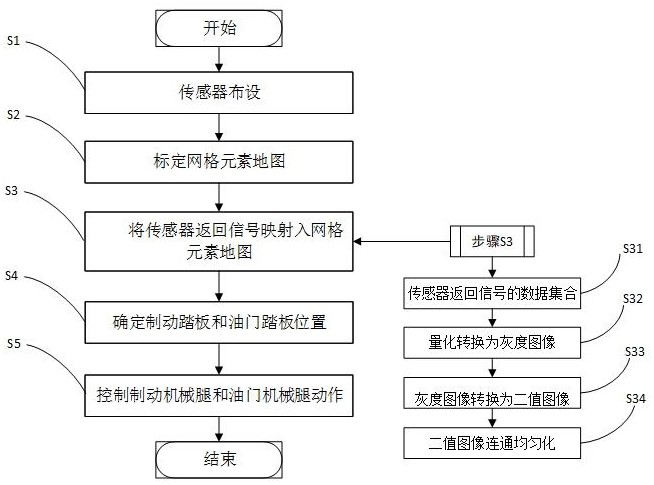
12、基于被动驾驶机器人的刹车油门自适应控制方法,包括
13、s1、第一传感装置和第二传感装置的传感器布设;
14、进一步的,第一传感装置包括若干个传感器,若干个所述传感器排列设置,所述第二传感装置与所述第一传感装置结构相同;其中,第一传感装置的传感器记为amn,第二传感装置的传感器记为bmn,其中,m、n为整数,且m≥0,n≥0。
15、s2、存储介质内标定网格元素地图;
16、以制动机械腿和油门机械腿的横向移动作为横坐标,纵向移动作为纵坐标,组成网格元素矩阵记为a(i,j)=[aij],其中,i、j为正整数,且i=1,2,......n,j=1,2,......n;
17、进一步的,制动机械腿初始状态时的中心传感器对应网格元素地图内位置为a00=a(i/2-nh/h)j/2;油门机械腿初始状态时的中心传感器对应网格元素地图内位置为b00=a(i/2+nh/h)j/2;制动机械腿和油门机械腿的横向移动间距l与网格元素的关系满足l≥h,传感器点源半径r与网格元素的关系满足r≥h/2;其中,h为各传感器之间的距离,n为每个方向传感器的个数,h为网格元素的边长。
18、s3、将传感器返回信号映射入网格元素地图;
19、s31、传感器检测物体的信号特征的集合q{tm丨m=1,2,......n},映射入网格元素矩阵a(i,j),得到t(i,j)=[tij],tij∈q{tm},q{tm}为机械腿扫描过程中的所有传感器返回信号的集合;
20、s32、将数字信号通过量化转换为灰度图像;
21、将时间信号按比例k进行等比例放大并取整得到灰度值g(i,j),g(i,j)=[k*t(i,j)],g(i,j)∈[0,255],得到灰度值矩阵g(i,j);
22、s33、将灰度图像转换为二值图像;
23、进一步的,制动机械腿和油门机械腿横向扫描时,l1=l0,l2=l0+β1x1,其中,β1为模型参数,x1为制动踏板和油门踏板处车辆支撑底板横向曲度模型;传感器测得制动踏板和油门踏板处返回的时间信号:t1=2l1/v=2l0/v,传感器测得车辆支撑底板处返回的时间信号:t2=2(l0+β1x1)/v;
24、进一步的,制动机械腿和油门机械腿纵向扫描时,即机器人执行机构平台旋转,l1=l0+ε,l2=l0+ε+β2x2,其中,β2为模型参数,x2为制动踏板和油门踏板处车辆支撑底板纵向曲度模型;传感器测得制动踏板和油门踏板处返回的时间信号:t1’=2l1/v=2(l0+ε)/v,传感器测得车辆支撑底板处返回的时间信号:t2’=2(l0+ε+β2x2)/v;
25、其中,ε为机械腿纵向扫描时沿轴运动产生的距离误差,ε=r(1-ζcosθ),r为机械腿调整半径,θ为旋转角度,ζ为调整系数;
26、进一步的,将矩阵g(i,j)的灰度图像值划分为集合u和p,u∈g(i,j),p∈g(i,j),g(i,j)=u∪p其中,u={q1{tij},q1’{tij}丨i=1,2,......n,j=1,2,......n},q1{tij}={2kl0/v+ε0丨i∈1,2,......n,j∈1,2,......n};q1’{tij}={2k(l0+ε)/v+ε0丨i∈1,2,......n,j∈1,2,......n};p={q2{tij},q2’{tij}丨i=1,2,......n,j=1,2,......n},q2{tij}={2k(l0+β1x1)/v+ε0丨i∈1,2,......n,j∈1,2,......n};q2’{tij}={2k(l0+ε+β2x2)/v+ε0丨i∈1,2,......n,j∈1,2,......n};ε0为变化的噪声误差项,ε0远远小于t1;
27、灰度值g∈g(i,j),;
28、s34、匀化二值图像;
29、根据小波比例变换系数n8(x),取任意的灰度值g1、g2,令,将网格元素连通均匀化;
30、s4、确定制动踏板和油门踏板位置;
31、查找灰度值为0的连通区域,并分别计算其对应面积,记为sx={sx丨x=1,2,......n};取面积最大的两个sx,通过查找网格元素地图对应的坐标确定制动踏板和油门踏板位置,并找到制动踏板和油门踏板对应网格元素地图上的中心点坐标。
32、s5、控制制动机械腿和油门机械腿动作;
33、中央处理器通过获得的网格元素地图上制动踏板和油门踏板对应的中心点坐标信息,关闭第一传感装置和第二传感装置,控制制动机械腿和油门机械腿动作。
34、本发明的工作原理及有益效果为:
35、基于被动驾驶机器人的刹车油门自适应控制系统及方法通过中央处理器对数据的处理和分析,可以实现机器人的制动机械腿和油门机械腿对车辆制动踏板和油门踏板的自动化和精确控制,从而提高了驾驶效率和安全性。
36、基于被动驾驶机器人的刹车油门自适应控制系统及方法采用先进的传感器技术和高精度算法,可以适用于不同型号、品牌、使用时间的车辆,扩展了驾驶机器人的应用范围,通用性增强。
37、基于被动驾驶机器人的刹车油门自适应控制方法采用虚拟成像方法对数据进行更为直观的转换,将数据映射入坐标网络,只需确定车辆制动踏板和油门踏板位置即可结束动作,无需进行全范围扫描,并可以直接调用已存储车型的制动踏板和油门踏板位置数据,节约时间,提高响应速度。
38、基于被动驾驶机器人的刹车油门自适应控制系统可以将制动踏板和油门踏板的位置信息发送给远程的服务器,进行数据分析和深度学习,为系统精度优化提供依据。
39、通过准确地测定制动踏板和油门踏板的位置,该系统可以有效地控制车辆的能耗,从而达到节能环保的效果。
- 还没有人留言评论。精彩留言会获得点赞!