一种悬架控制处理方法及系统与流程
本技术涉及车辆控制,更具体地说,涉及一种悬架控制处理方法及系统。
背景技术:
1、在车辆行驶的过程中,由于路面不平等因素,会将振动传递给车架,从而导致车辆承载系统的振动,因此需要对车辆悬架进行控制。
2、现有的车辆悬架控制方法主要根据各个车辆的传感器获取车辆的振动情况,并根据振动情况对车辆的舒适性进行调节,但是当车辆的传感器发生故障时,通过发生故障的传感器得到的信号对车辆悬架进行控制,会对车辆行驶过程中的稳定性和安全性带来影响。
3、因此,如何在车辆的传感器发生故障时仍然能确保对车辆悬架的控制,来实现在车辆行驶的过程中的稳定性和安全性,是本技术亟需解决的问题。
技术实现思路
1、有鉴于此,本技术公开了一种悬架控制处理方法及系统,旨在使得在车辆的传感器发生故障时仍然能确保对车辆悬架的正确控制,从而实现在车辆行驶的过程中的稳定性和车辆的安全性。
2、为了实现上述目的,其公开的技术方案如下:
3、本技术第一方面公开了一种悬架控制处理方法,所述方法包括:
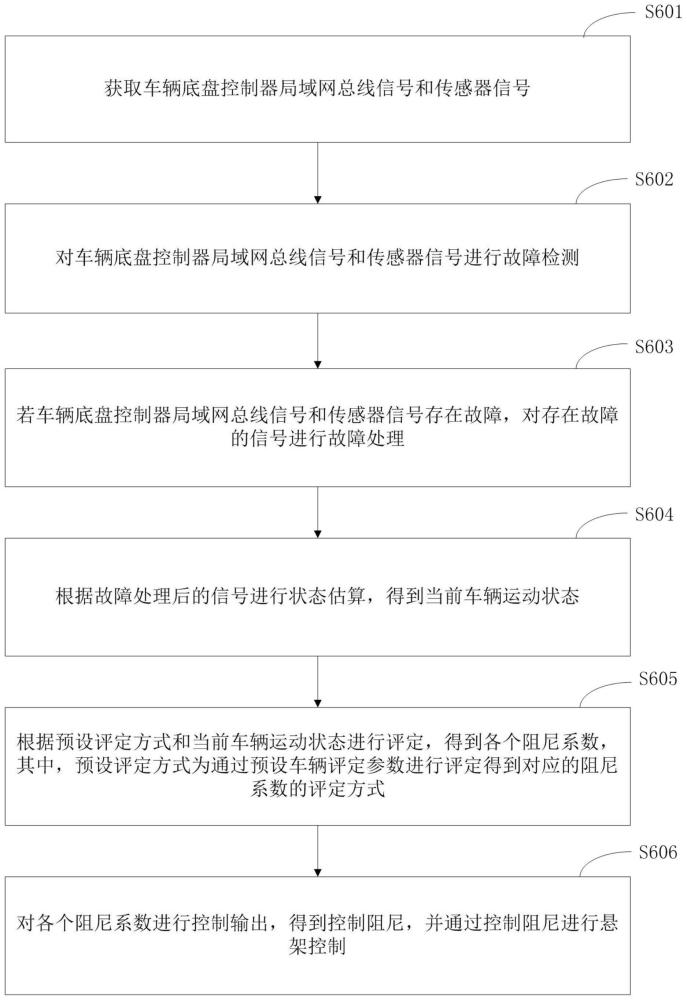
4、获取车辆底盘控制器局域网总线信号和传感器信号;
5、对所述车辆底盘控制器局域网总线信号和所述传感器信号进行故障检测;
6、若车辆底盘控制器局域网总线信号和传感器信号存在故障,对存在故障的信号进行故障处理;
7、根据故障处理后的信号进行状态估算,得到当前车辆运动状态;
8、根据预设评定方式和所述当前车辆运动状态进行评定,得到各个阻尼系数;其中,所述预设评定方式为通过预设车辆评定参数进行评定得到对应的阻尼系数的评定方式;
9、对各个阻尼系数进行控制输出,得到控制阻尼,并通过所述控制阻尼进行悬架控制。
10、优选的,对所述车辆底盘控制器局域网总线信号和所述传感器信号进行故障检测的过程,包括:
11、确定所述车辆底盘控制器局域网总线信号和所述传感器信号是否处于预设有效范围内,以及所述车辆底盘控制器局域网总线信号和所述传感器信号是否符合预设时间变化条件;所述预设时间变化条件为信号随着时间的变化而变化的条件;
12、若所述车辆底盘控制器局域网总线信号和传感器信号处于预设有效范围内,以及所述车辆底盘控制器局域网总线信号和所述传感器信号符合预设时间变化条件,确定车辆底盘控制器局域网总线信号和传感器信号为有效信号并确定对应的标志位;
13、若所述车辆底盘控制器局域网总线信号和传感器信号不处于预设有效范围内,或所述车辆底盘控制器局域网总线信号和所述传感器信号不符合预设时间变化条件,确定车辆底盘控制器局域网总线信号和传感器信号为无效信号,并确定无效信号对应的标志位以及该标志位所对应的故障信号。
14、优选的,若车辆底盘控制器局域网总线信号和传感器信号存在故障,对存在故障的信号进行故障处理的过程,包括:
15、针对有效信号的标志位,确定发生故障的信号对应的替代信号,并通过所述替代信号对存在故障的信号进行替代;
16、针对无效信号的标志位,确定无效信号的标志位对应的故障信号的影响范围;
17、根据所述影响范围确定受到影响的控制模块;
18、根据所述控制模块确定对应的固定阻尼系数。
19、优选的,根据故障处理后的信号进行状态估算,得到当前车辆运动状态的过程,包括:
20、若故障处理的信号中存在车辆垂向加速度,根据车辆垂向加速度估算当前车辆运动状态是否为车辆垂向运动状态;
21、若故障处理的信号中存在车辆纵向加速度、加速踏板位置参数和制动踏板位置参数,根据所述车辆纵向加速度、所述加速踏板位置参数和所述制动踏板位置参数估算当前车辆运动状态是否为俯仰状态;
22、若故障处理的信号中存在车辆侧向加速度和方向盘转角,根据所述车辆侧向加速度和所述方向盘转角估算当前车辆运动状态是否为侧倾状态;
23、若故障处理的信号中存在悬架行程,根据所述悬架行程评定当前车辆运动状态是否为需要启动极限行程控制的状态;
24、若故障处理的信号中存在车身加速和悬架行程,根据所述车身加速和所述悬架行程估算当前车辆运动状态是否为需要启动脉冲控制的状态;
25、若故障处理的信号中存在辅助信号,根据所述辅助信号评定当前车辆运动状态是否为极限工况状态。
26、优选的,所述根据预设评定方式和所述当前车辆运动状态进行评定,得到各个阻尼系数,包括:
27、获取预设车辆评定参数;所述预设车辆评定参数至少包括车辆垂向加速度、悬架速度、加速踏板制动踏板位置参数、车辆侧向加速度、方向盘转角、悬架行程参数、轮胎位移和极限工况判定参数;
28、将所述车辆垂向加速度和所述悬架速度进行垂向控制,得到垂向控制阻尼系数;
29、将所述车辆纵向加速度、所述加速踏板位置参数和所述制动踏板位置参数进行俯仰控制,得到俯仰控制阻尼系数;
30、将所述侧向加速度和所述方向盘转角进行侧倾控制,得到侧倾控制阻尼系数;
31、将所述悬架行程、所述悬架速度和车身高度进行极限行程控制,得到极限行程控制阻尼系数;
32、将所述车身加速度和所述悬架行程进行脉冲控制,得到脉冲控制阻尼系数;
33、将所述悬架行程、所述车轮位移和所述车轮速度进行轮跳控制,得到轮跳控制阻尼系数;
34、将所述极限工况判定参数进行极限工况控制,得到极限工况控制阻尼系数。
35、优选的,所述对各个阻尼系数进行控制输出,得到控制阻尼,并通过所述控制阻尼进行悬架控制,包括:
36、将所述垂向控制阻尼系数、所述俯仰控制阻尼系数和所述侧倾控制阻尼系数进行阻尼系数加权处理,得到加权后的阻尼系数;
37、将所述加权后的阻尼系数确定为车辆在平稳工况下的输出阻尼系数,并将所述在平稳工况下的输出阻尼系数确定为基础阻尼系数;
38、确定车辆当前状态;
39、若所述车辆当前状态为性能工况,将所述基础阻尼系数、所述脉冲控制阻尼系数和所述轮跳控制阻尼系数进行叠加,得到性能工况的阻尼系数;
40、若所述车辆当前状态为极限工况,将所述基础阻尼系数、所述极限行程控制阻尼系数和所述极限工况控制阻尼系数进行叠加,得到极限工况的阻尼系数;
41、若所述车辆当前状态为故障工况,根据所述基础阻尼系数输出故障工况系数;
42、将所述基础阻尼系数、所述性能工况的阻尼系数、所述极限工况的阻尼系数或所述故障工况系数进行仲裁输出;所述仲裁输出根据车辆当前状态的优先级确定;
43、对仲裁输出后的阻尼系数进行饱和限值;
44、对进行饱和限值后的阻尼系数进行阻尼系数变化量限值,得到控制阻尼;
45、通过所述控制阻尼进行悬架控制。
46、优选的,还包括:
47、对故障处理后的信号进行滤波去噪。
48、本技术第二方面公开了一种悬架控制处理系统,所述系统包括:
49、获取单元,用于获取车辆底盘控制器局域网总线信号和传感器信号;
50、故障检测单元,用于对所述车辆底盘控制器局域网总线信号和所述传感器信号进行故障检测;
51、故障处理单元,用于若车辆底盘控制器局域网总线信号和传感器信号存在故障,对存在故障的信号进行故障处理;
52、状态估算单元,用于根据故障处理后的信号进行状态估算,得到当前车辆运动状态;
53、评定单元,用于根据预设评定方式和所述当前车辆运动状态进行评定,得到各个阻尼系数;其中,所述预设评定方式为通过预设车辆评定参数进行评定得到对应的阻尼系数的评定方式;
54、控制单元,用于对各个阻尼系数进行控制输出,得到控制阻尼,并通过所述控制阻尼进行悬架控制。
55、优选的,所述故障检测单元,包括:
56、第一确定模块,用于确定所述车辆底盘控制器局域网总线信号和所述传感器信号是否处于预设有效范围内,以及所述车辆底盘控制器局域网总线信号和所述传感器信号是否符合预设时间变化条件;所述预设时间变化条件为信号随着时间的变化而变化的条件;
57、第二确定模块,用于若所述车辆底盘控制器局域网总线信号和传感器信号处于预设有效范围内,以及所述车辆底盘控制器局域网总线信号和所述传感器信号符合预设时间变化条件,确定车辆底盘控制器局域网总线信号和传感器信号为有效信号并确定对应的标志位;
58、第三确定模块,用于若所述车辆底盘控制器局域网总线信号和传感器信号不处于预设有效范围内,或所述车辆底盘控制器局域网总线信号和所述传感器信号不符合预设时间变化条件,确定车辆底盘控制器局域网总线信号和传感器信号为无效信号,并确定无效信号对应的标志位以及该标志位所对应的故障信号。
59、优选的,所述故障处理单元,包括:
60、替代模块,用于针对有效信号的标志位,确定发生故障的信号对应的替代信号,并通过所述替代信号对存在故障的信号进行替代;
61、第四确定模块,用于针对无效信号的标志位,确定无效信号的标志位对应的故障信号的影响范围;
62、第五确定模块,用于根据所述影响范围确定受到影响的控制模块;
63、第六确定模块,用于根据所述控制模块确定对应的固定阻尼系数。
64、经由上述技术方案可知,本技术公开了一种悬架控制处理方法及系统,获取车辆底盘控制器局域网总线信号和传感器信号,对车辆底盘控制器局域网总线信号和传感器信号进行故障检测,若车辆底盘控制器局域网总线信号和传感器信号存在故障,对存在故障的信号进行故障处理,根据故障处理后的信号进行状态估算,得到当前车辆运动状态,根据预设评定方式和当前车辆运动状态进行评定,得到各个阻尼系数,其中,预设评定方式为通过预设车辆评定参数进行评定得到对应的阻尼系数的评定方式,对各个阻尼系数进行控制输出,得到控制阻尼,并通过控制阻尼进行悬架控制。通过上述方案,相比于传统控制方法考虑的更为全面,不再单单是以舒适性为导向,本方案带有故障诊断,可以实现车辆悬架的传感器发生故障时,对存在故障的信号进行故障处理,得到故障处理后的正常信号,根据故障处理后的正常信号进行估算、评定、控制输出等操作,得到控制阻尼,通过控制阻尼进行悬架控制,使得在车辆的传感器发生故障时仍然能确保对车辆悬架的正确控制,从而实现在车辆行驶的过程中的稳定性和车辆的安全性。
- 还没有人留言评论。精彩留言会获得点赞!