一种考虑晕动约束的自动驾驶车辆主动悬架分频控制方法
本发明实施涉及车辆控制,具体涉及一种考虑晕动约束的自动驾驶车辆主动悬架分频控制方法。
背景技术:
1、在车辆控制技术领域,l4级别以上的自动驾驶是高度自动化的,已经不需要驾驶员控制车辆,驾驶员也转变为了乘客,允许没有驾驶能力的人独自出行。它可以弥补人类驾驶员会存在的缺陷,或者减轻人类驾驶员的工作量。
2、但是随着驾驶员也转变为乘客,也增加了乘客们获得晕动症的风险。目前已有的车辆控制方法可以保证自动驾驶车辆安全的完成驾驶任务,但是很少有方法考虑到乘车人的晕车情况,虽然车辆自动行驶过程中保证了乘客的安全,但是自动驾驶过程中会导致乘客产生晕动症,即晕车现象。
技术实现思路
1、本发明的目的在于解决目前车辆控制方法没有从乘车人晕车方面考量自动驾驶行为。在车辆进行自动或辅助驾驶时,既从安全方面对车辆进行控制,又将防止乘车人员晕车作为一目标函数。
2、为实现上述目的,本发明公开了一种考虑晕动约束的自动驾驶车辆主动悬架分频控制方法,该方法采用有限频域控制建立车辆得1/4悬架模型,该方法将晕车指标作为悬架约束条件中的一个重要指标,根据所采集到的路面信息与车身运行状态经过有限频域分频控制,将人体晕动的敏感频率段避开在保证安全和效率的情况下防止乘车人员感到晕车,控制车辆完成指定目标。
3、具体方案如下:
4、一种考虑晕动约束的自动驾驶车辆主动悬架分频控制方法,包括如下步骤:
5、s1:建立车辆1/4悬架动力学模型;
6、将乘客视为车身系统的一部分,将悬架系统建模为弹簧-阻尼系统(不考虑发动机和传动系的影响),并将车轮建模为弹簧-阻尼系统。路面激励通过点接触施加给轮胎,从而得到了车辆1/4悬架动力学模型;
7、s2:确定悬架系的增加约束;
8、s3:对车辆悬架进行控制;
9、在满足悬架约束的情况下,用线性矩阵不等式来刻画有限频域下的频域特性,借助于线性矩阵不等式方法,设计出有限频域控制器,对自动驾驶车辆的悬架进行控制,来满足主动悬架系统的频域要求,改善加速度,使得车辆在晕动区间的振动最低,防止乘车人员感到晕车,并改善车身加速度、悬架动行程和车轮动载荷。
10、进一步地,步骤s1具体为:
11、建立车辆四分之一主动悬架系统微分方程:
12、
13、
14、确定主动悬架系统的状态变量:
15、
16、确定系统的扰动输入,即速度输入:
17、
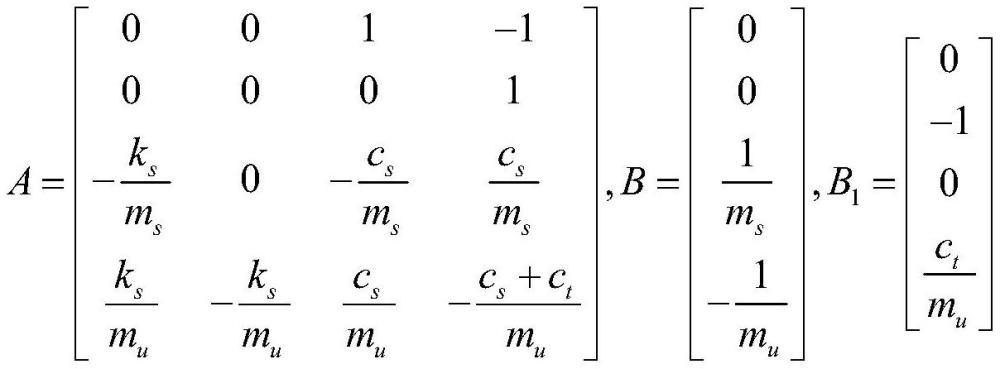
18、最后得到主动悬架系统的状态空间形式:
19、
20、其中的系数矩阵:
21、
22、其中ms表示簧上质量;mu表示簧下质量;cs表示悬架系统的阻尼系数;ks表示悬架系统的刚性系数;kt表示充气轮胎的刚性系数;ct为充气弹簧的阻尼系数;zs为簧上质量的位移;zu为簧下质量的位移;zr为路面位移扰动;u是主动悬架系统的控制输入;
23、进一步地,步骤s2具体为:
24、s2.1:确定悬架的性能约束
25、保持轮胎与路面接触,轮胎与路面间的动载小于静载,即车轮时刻保持与地面接触,而不发生车轮与地面毫无接触的现象,即需要满足:
26、kt(zu-zr)<(ms+mu)g (5)
27、由于悬架结构的限制,需要避免悬架撞击到悬架限位块而破环悬架结构,保证悬架能够正常使用,zmax为悬架行程的最大限度,即需要满足:
28、∣zs-zu∣≤zmax (6)使力发生器的输出力大小在力发生器的最大范围之内,既需要满足:
29、|u|≤umax (7)
30、定义g(jω)为从路面振动输入到控制输出z1(t)的传递函数,使得车辆在乘客晕动的敏感区间的振动最低可以归结为最小化。
31、
32、s2.2:确定悬架的控制输出量
33、在满足公式(5)、(6)、(7)的约束下,对公式(8)行优化。选择控制输出量z1,z2如下:
34、
35、
36、其中,g为重力加速度,[]t为转置矩阵
37、s2.3:获得汽车主动悬架控制系统的状态空间方程:
38、
39、z1=c1x+d1u
40、z2=c2x (11)
41、其中a,b,和b1已经在s1中给出,其中系数矩阵c1,c2,d1如下:
42、
43、s2.4:确定控制器的约束。
44、将有限频域h∞控制问题转变为设控制器的问题,使得闭环系统在满足公式(7)的同时满足如下约束:
45、
46、|z2i|≤1,i=1,2 (13)
47、其中,sup表示函数的上界,γ是一个给定的大于0的标量,ω1,ω2代表所关心频率段的上下限,根据gb/t 13441.1-2007,晕动病需要考虑的频率范围为0.1~0.5hz,故:
48、ω1=0.1hz,ω2=0.5hz
49、进一步地,步骤s3具体为:
50、s3.1:设计主动悬架控制器
51、主动悬架控制器的形式如下:
52、u=kx (14)
53、其中,k是待定的状态反馈增益矩阵,将上述控制器输入带入到系统的状态空间方程中,根据公式(11)得到闭环控制系统如下:
54、
55、
56、z2=c2x (15)
57、其中闭环控制系统的系数矩阵为
58、s3.2:在满足悬架约束的情况下,用线性矩阵不等式来刻画有限频域下的频域特性
59、控制器需要渐进稳定,在满足悬架的基本性能指标的情况下,满足防止晕车性能的约束。
60、以下为矩阵不等式需要满足的条件:
61、
62、
63、以下为控制器的约束矩阵不等式:
64、
65、
66、其中,γ,η和ρ,为给定标量,矩阵p,p1>0,q>0,f为一般矩阵,i为单位矩阵,矩阵对角线下方的“*”表示关于对角线对称的元素的转置;[f]s表示矩阵f与其转置的加和,即[f]s=f+ft,g(jω)表示复数频域;
67、首先需要满足在h∞控制中是渐近稳定的:
68、schur补引理的推导式等价于:
69、
70、根据反射引理可将(20)转换为
71、
72、其中p1-1表示p1的逆矩阵;
73、将其进一步转换可得:
74、
75、
76、根据(23)得到渐进稳定的闭环系统。
77、其次需要满足有限频域下的h∞性能条件。将不等式(17)进行等价变化如下:
78、jξjt+hπht+[γfλ]s<0 (24)
79、那么,根据射影定理,上式成立,当且仅当
80、
81、其中
82、
83、
84、上式(25)进一步转化为
85、
86、其中
87、
88、根据广义kyp引理推论和schur补引理可以得到
89、
90、π为不等式给定的对称矩阵
91、即可以得到有限频域h∞性能指标
92、在满足悬架的基本性能指标时需要考虑到扰动的影响,使用李雅普诺夫函数进行解决。标准的李亚普诺夫函数为其导数为
93、
94、由于得到
95、
96、由于可得:
97、
98、对此式子两边进行积分:
99、
100、xt(t)p1x≤v(0)+ηwmax=ρ (32)
101、控制的输入和约束下的输出如下:
102、
103、
104、另可以推导出不等式:
105、
106、
107、即得到了控制车辆基本性能指标的不等式,其中(35)(36)等价与(18)(19)。
108、s3.3:设计出有限频域控制器,对自动驾驶车辆的悬架进行控制
109、控制的线性矩阵不等式为:
110、
111、
112、其中,γ,η和ρ,为给定标量,矩阵和为一般矩阵
113、
114、其中状态反馈控制器u=kx:
115、状态反馈控制器增益k通过下式求解:
116、
117、将带有复变量的线性矩阵不等式转换为扩维的实变量线性矩阵不等式,即:
118、
119、其中
120、
121、
122、线性矩阵不等式(38)可以直接被ma tlab中的求解器求解,得到矩阵和根据式(39),求出满足悬架基本性能约束(18)(19)和晕动约束(27)下的状态反馈控制器增益k;再根据式(14)得到控制器的控制力u;最后通过有限频域h∞控制来满足主动悬架系统的频域要求,改善加速度,使得车辆在晕动区间的振动最低,防止乘车人员感到晕车,并改善车身加速度、悬架动行程和车轮动载荷。
123、与现有技术相比,本专利具备以下有益效果:
124、1.在悬架的研究中他的三个主要性能指标是舒适度,悬架动行程和接地性,然而这些性能往往是冲突的。我们将车辆在0.1~0.5hz的低频振动作为我们的优化目标,将它作为我们的性能约束,在满足舒适性的同时,满足悬架的性能约束,即是带有约束的多目标优化问题。
125、2.现有的的有限频域的处理方法有权重函数法和分割频域法。权重函数法的系统复杂性太高,要求其进行精确控制是十分困难的。分频分割法在设计过程中缺乏性能保证,且消耗算力较大。本专利仅在容易发生晕车的频率段进行了分频控制,不对车辆的控制器在算力方面有更多的要求。能够在保证安全和效率的情况下防止乘车人员感到晕车,控制车辆完成指定目标。
- 还没有人留言评论。精彩留言会获得点赞!