一种轮式机器人及其控制系统与控制方法与流程
本发明涉及轮式机器人原地转向技术,具体涉及一种轮式机器人及其控制系统与控制方法。
背景技术:
1、随着机器人技术的快速发展,轮式机器人得到了大力的发展,尤其是在工业和服务行业,存在着大量的轮式机器人。轮式机器人是基于电机、车轮、底盘等为基础构建的一整套的机器人系统,运动底盘是其运动的基石,只有稳定可靠的运动才能完成其他应用功能,实现轮式机器人的智能化工作。
2、轮式机器人可搭载视频、红外、声纹、消杀、消防等设备,完成类人工作,实现对简单重复劳动的替代。以变电站轮式巡检机器人为例,变电站轮式巡检机器人可于变电站的室内外巡检,无轨化的导航方式使得机器人可以自由地行进在变电站各类道路上,配合红外测温、图像识别、噪音采集等技术对变电站内一次设备进行常规检测,并将采集到的图像、视频信息和温度、湿度、气压等数据实时地传输到远方后台,实现实时地远端监控。相较于人工巡检,机器人巡检拥有更规范的排查机制,收集到的数据更加的可靠精确,反馈更加的及时,而且机器人也可以探测到设备存在的潜在安全隐患,并且机器人可以在各种恶劣天气下正常工作。机器人节省了人力,有效提升了变电站巡检的效率,也保障了从业人员的人身安全。
3、轮式机器人根据动力轮的个数可分为两轮差速运动、四轮差速运动和四轮全向等结构,在实际应用中两轮差速运动具有控制简单、前进运行精度多、转向灵活的特点,但是其存在转弯半径大、后退运动易偏航的缺点,应用场景受到了很大的限制;四轮差速运动具有原地转弯、运动灵活的特点,但是其转向过程中对轮胎磨损大,时间久了将导致运动参数出现偏差并需要定期更换轮胎,应用成本高;四轮全向具有原地转弯、运行灵活、轮胎磨损小的有点,但是其结构复杂、需要增加四个转向舵机,控制难度大且可靠性不足。
技术实现思路
1、发明目的:本发明的目的之一旨在提供一种轮式机器人,通过设计一种双摇杆转向机构,实现机器人原地转向及运动控制的功能;本发明还提供一种轮式机器人的控制系统和控制方法。
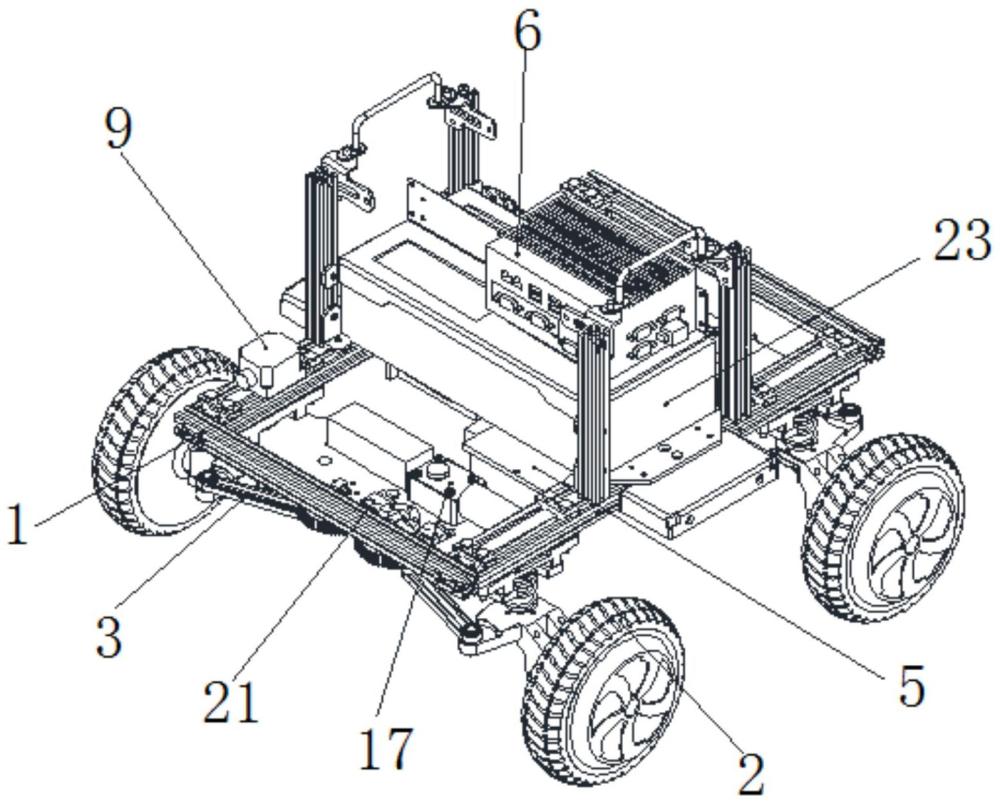
2、技术方案:本发明所述的轮式机器人包括车架以及安装于车架上的轮毂电机,车架上还设有用于控制轮毂电机运动的双摇杆转向机构,双摇杆转向机构设有两组为左右对称的结构分别左右两侧的轮毂电机连接,双摇杆转向机构包括安装板,安装板上设有转向电机模块,其输出轴上连接小齿轮;安装板另一侧安装有两个相互啮合的大齿轮,大齿轮通过连杆与对应侧的轮毂电机连接。
3、其中,所述连杆分别与对应侧摇杆臂的轮轴座连接,轮毂电机通过支撑轴安装于轮轴座上。
4、其中,还包括用于对轮毂电机转向进行限位的限位模块,限位模块包括设置于安装板上的限位杆,限位杆通过与安装板上的转向限位器接触进行转向限位。通过与复位限位器接触进行复位限位。
5、其中,所述轮毂电机的转向角度为0°~45°。
6、其中,所述电机模块,所述电机模块包括转向电机、涡轮蜗杆减速器、直流正反切换继电器,电机模块用于控制双摇杆转向机构进入复位状态和转向状态并进行自锁,进行机器人的行走或转向。
7、其中,还包括驱动器模块,驱动器模块包括轮毂电机驱动器和转向电机驱动器,轮毂电机驱动器用于控制轮毂电机的正转、反转、加速度、转速并反馈位移、转速、加速度、温度、转矩等信号,转向电机驱动器用于控制转向电机的正转、反转、加速度、转速并反馈位移、转速、加速度、温度、转矩等信号,实现轮式机器人的运动控制和转向控制。
8、一种轮式机器人的控制系统,包括固定在车架上的工控机,工控机通过数据线缆连接驱动器、转向电机模块、限位器摸块、惯导模块以及电源模块;所述工控机部署linux系统,利用ros架构,进行通讯数据交互;所述惯导模块用于判断机器人当前旋转角度和位姿角度,并使用相对值方式,避免角度误差的累计,实现机器人转向角度的精准控制。
9、一种轮式机器人的控制方法,包括信息的交互和机器人运动状态的控制;所述机器人运动状态的控制包括正常行驶和转向,所述正常行驶包括以下步骤:
10、步骤11、初始化机器人运动状态,进入机器人复位状态并进入自锁,复位转向电机使转向机构转向复位限位器,确保轮式机器人左右轮毂处于平行状态;
11、步骤12、接收运动信号,驱动轮毂电机转动,机器人实现前后行走;
12、步骤13、判断是否到达目标点,若果没有到达目标点且未收到停止命令,机器人保持运动状态不变继续行走;
13、步骤14、如果到达目标点或未收到停止命令,机器人进入停止状态;
14、步骤15、机器人停止,将运动数据设定为0并解除复位状态自锁。
15、其中,所述转向的控制包括以下步骤:
16、步骤21、发布机器人停止命令,将机器人运动数据设定为0进入复位状态并解除自锁;
17、步骤22、接收转向命令,驱动转向单机转动,同时控制轮毂电机沿着支撑轴转动,其中左前轮右转45°,右前轮左转45°,左后轮左转45°,右后轮右转45°,触发转向限位器并自锁,进入转向准备状态;
18、步骤23、读取机器人所需转向角度;
19、步骤24、控制轮毂电机转动,进行机器人原地转向;
20、步骤25、判断机器人是否转向到所需角度,当达到所需角度后,停止转向并发布停止转向命令;
21、步骤26、收到停止转向命令后,解除转向限位自锁,机器人控制转向机构复位,当转向机构触发复位传感器后,进入机器人复位状态并进入自锁,完成本次原地转向过程;其中转向过程中,由复位状态进入转向状态和由转向状态进入复位状态可精准控制,保证机器人在状态切换的过程中保持机器人位姿不变。
22、其中,所述信息包括机器人的运动数据,具体为速度信息、旋转信息和停止信息;其交互过程包括以下步骤:
23、步骤31、机器人发布标准的运动参数,包括速度参数linear.x和旋转参数angular.z;
24、步骤32、机器人运动使用时速度参数和旋转参数互斥,即两者不可同时赋值非零参数;
25、步骤33、当收到停止信息:stop_flag时,会强制清零速度参数和旋转参数,保证机器人停止。
26、有益效果:本发明与现有技术相比,具有显著的进步:本发明机器人通过双摇杆转向机构的控制,实现轮式机器人的原地转向功能。当机器人需要直线运动时,转向电机处于复位状态,转向机构处在复位位置,机器人左右两侧的轮毂电机处于平行位置,实现机器人的前后行进的控制;当机器人需要转向时,使能转向电机处于转向状态,转向电机带动双摇杆转向机构动作,转向机构处在转向位置,机器人左右两侧的轮毂电机处于夹角位置,进入转向准备状态,然后控制轮毂电机转动完成机器人的正转向和反转向,机器人到达转向角度后,控制转向电机复位,恢复机器人至直线行走准备状态,通过这一系统的控制方法实现轮式机器人的原地转向功能。本发明通过双摇杆转向系统的控制方法实现轮式机器人的原地转动的功能,提高了机器人转向的灵活性和精确度,同时减少了轮毂电机因原地转向对轮胎的磨损。
- 还没有人留言评论。精彩留言会获得点赞!