全自动钻锚机器人的自动行走支撑装置的制作方法
1.本实用新型涉及一种全自动钻锚机器人的自动行走支撑装置,属于钻锚领域。
背景技术:
2.巷道环境恶劣、空间狭窄,锚护作业不仅需要在巷道内进行铺网、还需要钻孔和锚固,目前工人不仅需要忍受恶劣的环境,同时还面临繁重的作业压力。
3.山地区域环境恶劣,在进行现场作业时,不便安排较多的工作人员在场,但一些工程师需要在现场对钻孔操作进行指导,在钻机在山地中探索时,其路况、行程等信息都是不确定因素,且野外山地由于地形原因,信号很差,要想实施保证路线最优以及钻孔操作,需要采用无线网络传输进行信号交互。
4.现有的行走机构存在行走不稳定,操作不方便的问题。
技术实现要素:
5.为克服现有技术的缺陷,本实用新型提供一种全自动钻锚机器人的自动行走支撑装置,本实用新型的技术方案是:
6.一种全自动钻锚机器人的自动行走支撑装置,包括车架、行走履带、左前行走支撑单元、右前行走支撑单元、左后行走支撑单元和右后行走支撑单元,在所述车架的两侧分别安装有所述的行走履带,两条所述的行走履带沿车架对称设置;在该车架前部的左侧安装有所述的左前行走支撑单元,右侧安装有所述的右前行走支撑单元,该左前行走支撑单元与所述的右前行支撑单元沿车架对称设置;在该车架后部的左侧安装有所述的左后行走支撑单元,右侧安装有所述的右后行走支撑单元,该左后行走支撑单元与所述的右后行支撑单元沿车架对称设置;当所述的左前行走支撑单元、右前行走支撑单元、左后行走支撑单元和右后行走支撑单元与地面接触时,所述的行走履带远离地面;在所述的车架上还安装有无线传输设备和智能感知系统,所述的行走履带、左前行走支撑单元、右前行走支撑单元、左后行走支撑单元和右后行走支撑单元、无线传输设备以及智能感知系统均通过安装在车架上的控制箱控制。
7.所述的智能感知系统包括状态感知传感器和执行器,所述状态感知传感器用于实时获取环境状态的参数,并传输至控制箱;所述执行器用于对获取并执行控制箱下达的工作指令;所述无线传输设备用于远程控制终端与控制箱之间的信号连接及数据传输。
8.所述的左前行走支撑单元包括左前支撑关节、左前油缸连接座、左前支撑腿、左前支撑油缸和左前支撑脚垫,该左前支撑腿的一端通过左前支撑关转动的安装在所述的车架上,另一端安装有所述的左前支撑脚垫;所述的左前支撑油缸的缸体铰接在所述的左前支撑腿上,所述左前支撑油缸的活塞杆通过左前油缸连接座安装在所述的车架上,该左前支撑油缸的活塞杆与所述的左前油缸连接座铰接在一起;所述的左前支撑腿呈折弯状设置。
9.所述的右前行走支撑单元包括右前支撑关节、右前油缸连接座、右前支撑腿、右前支撑油缸和右前支撑脚垫,该右前支撑腿的一端通过右前支撑关节转动的安装在所述的车
架上,另一端安装有所述的右前支撑脚垫;所述的右前支撑油缸的缸体铰接在所述的右前支撑腿上,所述右前支撑油缸的活塞杆通过右前油缸连接座安装在所述的车架上,该右前支撑油缸的活塞杆与所述的左前油缸连接座铰接在一起;所述的右前支撑腿呈折弯状设置。
10.所述的左后行走支撑单元包括左后支撑关节、左后油缸连接座、左后支撑腿、左后支撑油缸和左后支撑脚垫,该左后支撑腿的一端通过左后支撑关节转动的安装在所述的车架上,另一端安装有所述的左后支撑脚垫;所述的左后支撑油缸的缸体铰接在所述的左后支撑腿上,所述左后支撑油缸的活塞杆通过左后油缸连接座安装在所述的车架上,该左后支撑油缸的活塞杆与所述的左后油缸连接座铰接在一起;所述的左后支撑腿呈折弯状设置。
11.所述的右后行走支撑单元包括右后支撑关节、右后油缸连接座、右后支撑腿、右后支撑油缸和右后支撑脚垫,该右后支撑腿的一端通过右后支撑关节转动的安装在所述的车架上,另一端安装有所述的右后支撑脚垫;所述的右后支撑油缸的缸体铰接在所述的右后支撑腿上,所述右后支撑油缸的活塞杆通过右后油缸连接座安装在所述的车架上,该右后支撑油缸的活塞杆与所述的右后油缸连接座铰接在一起;所述的右后支撑腿呈折弯状设置。
12.本实用新型的优点是:
13.狭长的结构便于通过狭窄地点,比如从掘进机旁边行走到掘进机前面等等。
14.车架上设有左前行走支撑单元、右前行走支撑单元、左后行走支撑单元和右后行走支撑单元,能够保证复杂环境车架稳定。
15.左前行走支撑单元、右前行走支撑单元、左后行走支撑单元和右后行走支撑单元,可以独立动作,能够保证在坡度较大工作地点调整车身达到平衡稳定状态。
16.左前行走支撑单元、右前行走支撑单元、左后行走支撑单元和右后行走支撑单元的设置,能够保证钻机伸展到比较远的时候车身稳定,增加钻机作业面积。
附图说明
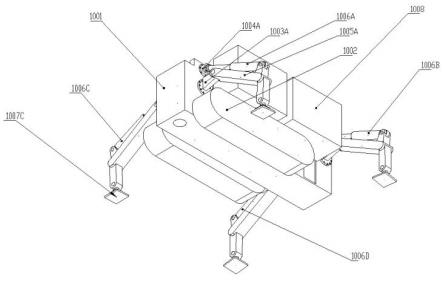
17.图1是本实用新型的主体结构示意图。
18.图2是图1的俯视图。
具体实施方式
19.下面结合具体实施例来进一步描述本实用新型,本实用新型的优点和特点将会随着描述而更为清楚。但这些实施例仅是范例性的,并不对本实用新型的范围构成任何限制。本领域技术人员应该理解的是,在不偏离本实用新型的精神和范围下可以对本实用新型技术方案的细节和形式进行修改或替换,但这些修改和替换均落入本实用新型的保护范围内。
20.参见图1和图2,本实用新型涉及一种全自动钻锚机器人的自动行走支撑装置,包括车架1001、行走履带1002、左前行走支撑单元、右前行走支撑单元、左后行走支撑单元和右后行走支撑单元,在所述车架1001的两侧分别安装有所述的行走履带1002,两条所述的行走履带1002沿车架1001对称设置;在该车架前部的左侧安装有所述的左前行走支撑单
元,右侧安装有所述的右前行走支撑单元,该左前行走支撑单元与所述的右前行支撑单元沿车架1001对称设置;在该车架后部的左侧安装有所述的左后行走支撑单元,右侧安装有所述的右后行走支撑单元,该左后行走支撑单元与所述的右后行支撑单元沿车架1001对称设置;当所述的左前行走支撑单元、右前行走支撑单元、左后行走支撑单元和右后行走支撑单元与地面接触时,所述的行走履带1002远离地面;在所述的车架上还安装有无线传输设备和智能感知系统,所述的行走履带1002、左前行走支撑单元、右前行走支撑单元、左后行走支撑单元和右后行走支撑单元、无线传输设备以及智能感知系统均通过安装在车架上的控制箱1008控制。
21.所述的智能感知系统包括状态感知传感器和执行器,所述状态感知传感器用于实时获取环境状态的参数,并传输至控制箱;所述执行器用于对获取并执行控制箱下达的工作指令;所述无线传输设备用于远程控制终端与控制箱之间的信号连接及数据传输;所述的状态传感器包括但不限于激光定位器、距离传感器、温度计、液位计、压力传感器等。
22.所述的左前行走支撑单元包括左前支撑关节1003a、左前油缸连接座1004a、左前支撑腿1005a、左前支撑油缸1006a和左前支撑脚垫1007a,该左前支撑腿1005a的一端通过左前支撑关节1003a转动的安装在所述的车架1001上,另一端安装有所述的左前支撑脚垫1007a;所述的左前支撑油缸1006a的缸体铰接在所述的左前支撑腿1005a上,所述左前支撑油缸1006a的活塞杆通过左前油缸连接座1004a安装在所述的车架1001上,该左前支撑油缸1006a的活塞杆与所述的左前油缸连接座1004a铰接在一起;所述的左前支撑腿1005a呈折弯状设置。
23.所述的右前行走支撑单元包括右前支撑关节1003c、右前油缸连接座1004c、右前支撑腿1005c、右前支撑油缸1006c和右前支撑脚垫1007c,该右前支撑腿1005c的一端通过右前支撑关节1003c转动的安装在所述的车架1001上,另一端安装有所述的右前支撑脚垫1007c;所述的右前支撑油缸1006c的缸体铰接在所述的右前支撑腿1005c上,所述右前支撑油缸1006c的活塞杆通过右前油缸连接座1004c安装在所述的车架1001上,该右前支撑油缸1006c的活塞杆与所述的左前油缸连接座1004a铰接在一起;所述的右前支撑腿1005c呈折弯状设置。
24.所述的左后行走支撑单元包括左后支撑关节1003b、左后油缸连接座1004b、左后支撑腿1005b、左后支撑油缸1006b和左后支撑脚垫1007b,该左后支撑腿1005b的一端通过左后支撑关节1003b转动的安装在所述的车架1001上,另一端安装有所述的左后支撑脚垫1007b;所述的左后支撑油缸1006b的缸体铰接在所述的左后支撑腿1005b上,所述左后支撑油缸1006b的活塞杆通过左后油缸连接座1004b安装在所述的车架1001上,该左后支撑油缸1006b的活塞杆与所述的左后油缸连接座1004b铰接在一起;所述的左后支撑腿1005b呈折弯状设置。
25.所述的右后行走支撑单元包括右后支撑关节1003d、右后油缸连接座1004d、右后支撑腿1005d、右后支撑油缸1006d和右后支撑脚垫1007d,该右后支撑腿1005d的一端通过右后支撑关节1003d转动的安装在所述的车架1001上,另一端安装有所述的右后支撑脚垫1007d;所述的右后支撑油缸1006d的缸体铰接在所述的右后支撑腿1005d上,所述右后支撑油缸1006d的活塞杆通过右后油缸连接座1004d安装在所述的车架1001上,该右后支撑油缸1006b的活塞杆与所述的右后油缸连接座1004d铰接在一起;所述的右后支撑腿1005d呈折
弯状设置。
26.本实用新型的工作原理是:本实用新型通过行走履带达到进入到工作现场以后,通过智能感知系统感知现场情形,当行走至适宜位置后,控制箱控制左前行走支撑单元、右前行走支撑单元、左后行走支撑单元和右后行走支撑单元同步动作(在未达到现场时,左前行走支撑单元、右前行走支撑单元、左后行走支撑单元和右后行走支撑单元均位于车架1001的上部),左前支撑油缸1006a驱动左前支撑腿1005a向下摆动下移,直至左前支撑脚垫1007a与地面接触;右前支撑油缸1006c驱动右前支撑腿1005c向下摆动下移,直至右前支撑脚垫1007c与地面接触;左后支撑油缸1006b驱动左后支撑腿1005b向下摆动下移,直至左后支撑脚垫1007b与地面接触;右后支撑油缸1006d驱动右后支撑腿1005d向下摆动下移,直至右后支撑脚垫1007d与地面接触,完成了车架1001的固定。
27.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1