煤矿井下巡检机器人的换电装置及系统的制作方法
本申请属于煤矿安全,尤其涉及一种煤矿井下巡检机器人的换电装置及系统。
背景技术:
1、煤矿机器人是构建智能煤矿的重要组成部分,是提升煤矿智能装备水平的重要体现,是实现煤矿“少人、无人”的有效支撑。随着国家相关行业主管部门的不断推动,以及煤炭生产企业的高度重视,以巡检机器人为代表的各类机器人已成井下智能化建设的重要装备。目前已经下井的防爆巡检机器人根据动力源的不同,主要有锂电池供电、钢丝绳牵引两种方式。钢丝绳牵引机器人由于外部装置需求高、工程施工难度大、使用场所受限等问题,应用较少,因此井下防爆巡检机器人大多采用锂电池作为动力来源。《煤矿安全规程》对使用蓄电池设备的充电场所有明确的要求:机车等移动设备在专用充电硐室或者地面充电;监控、通信、避险等设备的备用电源可以就地充电,并有防过充等保护措施。规程相关要求不适合于井下巡检机器人,巡检机器人井下充电缺乏依据。
2、锂电池属于高能化学电池,当误用滥用或者生产制造存在自身缺陷,有出现泄压、着火,甚至爆炸的可能性。据统计,超过80%以上的电动车着火安全事故都发生在充电环节。煤矿井下为具有瓦斯煤尘潜在性爆炸危险的特殊环境,目前机器人井下有线、无线充电方式均存在防爆安全难以保障、充电过程安全保护控制不可靠等多方面问题,解决井下机器人的充电难题已经迫在眉睫。
3、无线充电利用电磁场或电磁波实现电能非接触传输,依据gb/t3836.1《爆炸性环境第5部分:设备通用要求》标准中的电磁能功率阈值要求,煤矿井下9k~60ghz的射频电磁波阈功率不得超过6w,煤矿井下防爆无线充电功率受限,无法对机器人实现高效充电。国内相关企业将无线充电装备置于隔爆腔内,机器人进入隔爆腔内进行无线充电,用以突破标准中对电磁能功率阈值的限制。
4、上述无线充电方案在煤矿复杂环境中应用,隔爆充电腔内容易进入煤粉等异物,造成无线充电装置失效,无法实现换电和自动充电。
技术实现思路
1、本申请的实施例提供了一种煤矿井下巡检机器人的换电装置及系统,进而能够减少因煤粉等异物造成无线充电装置失效,实现煤矿井下巡检机器人的换电和自动充电。
2、本申请的其它特性和优点将通过下面的详细描述变得显然,或部分地通过本申请的实践而习得。
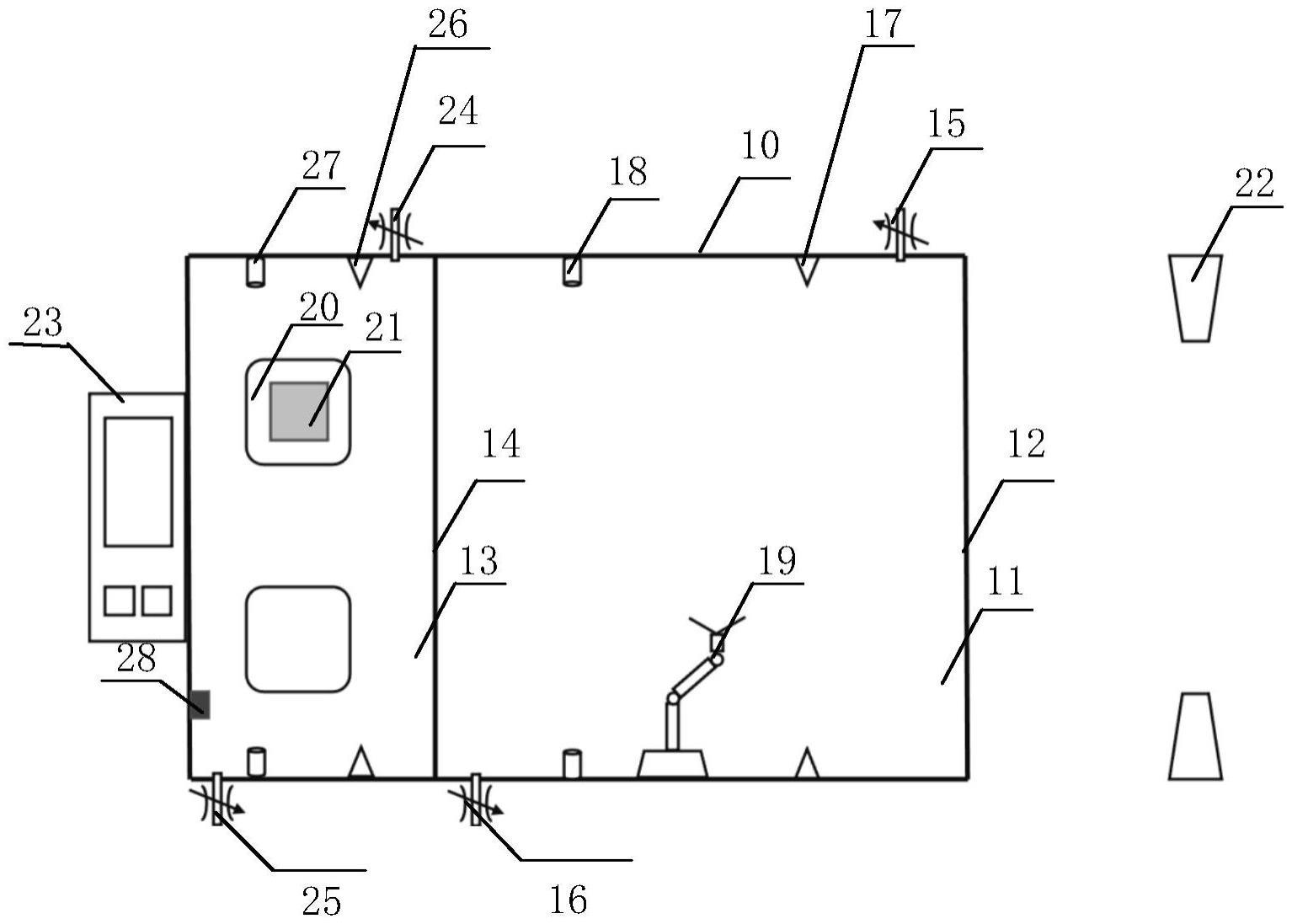
3、根据本申请实施例的第一方面,提供了一种煤矿井下巡检机器人的换电装置,所述换电装置包括:壳体、第一正压腔、第一正压腔门、第二正压腔、第二正压腔门、第一进气阀、第一出气阀、第一甲烷浓度传感器、第一压力传感器、换电模块、无线充电发射模块、满充储备电源、第二进气阀、第二出气阀、第二甲烷浓度传感器、第二压力传感器、吹扫模块和和控制模块;其中,
4、所述吹扫模块,在所述壳体外且靠近所述第一正压腔门的一侧设置;
5、所述第一正压腔门设置于所述壳体上,所述第一正压腔和所述第二正压腔通过所述第二正压腔门隔开,所述第一正压腔内设置有所述第一进气阀、所述第一出气阀、所述第一甲烷浓度传感器、所述第一压力传感器和所述换电模块,所述第一进气阀和所述第一出气阀用于对所述第一正压腔内的气体进行置换,所述换电模块用于对所述巡检机器人的电源模块进行卸取和安装;
6、所述第二正压腔内设置有所述第二进气阀、所述第二出气阀、所述第二甲烷浓度传感器、所述第二压力传感器、所述无线充电发射模块和所述满充储备电源,所述第二进气阀和所述第二出气阀用于对所述第二正压腔内的气体进行置换,所述无线充电发射模块用于对所述电源模块进行无线充电;
7、所述控制模块分别与所述第一正压腔门、所述第二正压腔门、所述第一进气阀、所述第一出气阀、所述第二进气阀、所述第二出气阀、所述第一甲烷浓度传感器、所述第一压力传感器、所述第二甲烷浓度传感器、所述第二压力传感器、所述无线充电发射模块和所述吹扫模块连接。
8、在本申请的一些实施例中,基于前述方案,所述换电装置还包括:灭火模块,设置于所述第二正压腔内,所述灭火模块与所述控制模块连接。
9、在本申请的一些实施例中,基于前述方案,所述第一正压腔上设置有第一进气口和第一出气口,所述第一进气阀设置于所述第一进气口处,所述第一进气口通过煤矿井下通风管道接入保护气体,所述第一出气阀设置于所述第一出气口处,所述第一出气口通过出气管与回风巷相连。
10、在本申请的一些实施例中,基于前述方案,所述第二正压腔上设置有第二进气口和第二出气口,所述第二进气阀设置于所述第二进气口处,所述第二进气口通过煤矿井下通风管道接入保护气体,所述第二出气阀设置于所述第二出气口处,所述第二出气口通过出气管与回风巷相连。
11、在本申请的一些实施例中,基于前述方案,所述第一甲烷浓度传感器、所述第一压力传感器、所述第二甲烷浓度传感器和所述第二压力传感器的数量为多个。
12、在本申请的一些实施例中,基于前述方案,所述换电模块为机械臂或码垛机器人。
13、在本申请的一些实施例中,基于前述方案,所述机械臂上设置有视觉相机,所述无线充电发射模块上设置有用于所述视觉相机进行视觉识别的标识点。
14、根据本申请实施例的第二方面,提供了一种煤矿井下巡检机器人的换电系统,所述换电系统包括:
15、巡检机器人,内置有电源模块;以及
16、上述的煤矿井下巡检机器人的换电装置。
17、在本申请的一些实施例中,基于前述方案,所述电源模块上设置有锁紧结构和快换结构。
18、在本申请的一些实施例中,基于前述方案,所述巡检机器人内设置有距离测量传感器,所述距离测量传感器与所述控制模块通信。
19、在本申请中,通过在换电装置中设置吹扫模块和两个正压腔,可以在对巡检机器人进行吹扫后,将巡检机器人的电源模块从第一正压腔卸取,并在第二正压腔充电和换电,保障了巡检机器人的电源模块所在的充电和换电环境的洁净度,避免了无线充电发射模块失效,实现了巡检机器人在煤矿井下的换电和自动充电。
20、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种煤矿井下巡检机器人的换电装置,其特征在于,所述换电装置包括:壳体、第一正压腔、第一正压腔门、第二正压腔、第二正压腔门、第一进气阀、第一出气阀、第一甲烷浓度传感器、第一压力传感器、换电模块、无线充电发射模块、满充储备电源、第二进气阀、第二出气阀、第二甲烷浓度传感器、第二压力传感器、吹扫模块和和控制模块;其中,
2.根据权利要求1所述的煤矿井下巡检机器人的换电装置,其特征在于,所述换电装置还包括:灭火模块,设置于所述第二正压腔内,所述灭火模块与所述控制模块连接。
3.根据权利要求1所述的煤矿井下巡检机器人的换电装置,其特征在于,所述第一正压腔上设置有第一进气口和第一出气口,所述第一进气阀设置于所述第一进气口处,所述第一进气口通过煤矿井下通风管道接入保护气体,所述第一出气阀设置于所述第一出气口处,所述第一出气口通过出气管与回风巷相连。
4.根据权利要求1所述的煤矿井下巡检机器人的换电装置,其特征在于,所述第二正压腔上设置有第二进气口和第二出气口,所述第二进气阀设置于所述第二进气口处,所述第二进气口通过煤矿井下通风管道接入保护气体,所述第二出气阀设置于所述第二出气口处,所述第二出气口通过出气管与回风巷相连。
5.根据权利要求1所述的煤矿井下巡检机器人的换电装置,其特征在于,所述第一甲烷浓度传感器、所述第一压力传感器、所述第二甲烷浓度传感器和所述第二压力传感器的数量为多个。
6.根据权利要求1所述的煤矿井下巡检机器人的换电装置,其特征在于,所述换电模块为机械臂或码垛机器人。
7.根据权利要求6所述的煤矿井下巡检机器人的换电装置,其特征在于,所述机械臂上设置有视觉相机,所述无线充电发射模块上设置有用于所述视觉相机进行视觉识别的标识点。
8.一种煤矿井下巡检机器人的换电系统,其特征在于,所述换电系统包括:
9.根据权利要求8所述的煤矿井下巡检机器人的换电系统,其特征在于,所述电源模块上设置有锁紧结构和快换结构。
10.根据权利要求8所述的煤矿井下巡检机器人的换电系统,其特征在于,所述巡检机器人内设置有距离测量传感器,所述距离测量传感器与所述控制模块通信。
技术总结
本申请公开了一种煤矿井下巡检机器人的换电装置及系统,所述换电装置包括:壳体、第一正压腔、第一正压腔门、第二正压腔、第二正压腔门、第一进气阀、第一出气阀、第一甲烷浓度传感器、第一压力传感器、换电模块、无线充电发射模块、满充储备电源、第二进气阀、第二出气阀、第二甲烷浓度传感器、第二压力传感器、吹扫模块和和控制模块,通过在换电装置中设置吹扫模块和两个正压腔,可以在对巡检机器人进行吹扫后,将巡检机器人的电源模块从第一正压腔卸取,并在第二正压腔充电和换电,保障了巡检机器人的电源模块所在的充电和换电环境的洁净度,避免了无线充电发射模块失效,实现了巡检机器人在煤矿井下的换电和自动充电。
技术研发人员:郭子文,孟积渐,徐建文,李子涵,张勇,林俊,赵英,苏珂嘉
受保护的技术使用者:安标国家矿用产品安全标志中心有限公司
技术研发日:20230308
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!