多模式挂桶式垃圾车称重结构的制作方法
本技术属于垃圾车称重,具体涉及一种多模式挂桶式垃圾车称重结构。
背景技术:
1、结合国内垃圾称重数据化发展趋势,通过在垃圾收运车上安装称重装置以迎合未来垃圾收运智能化和物联网化的行业发展需求。目前挂桶式垃圾车称重系统大多只能适用于一种规格垃圾桶的称重;然而针对多模式挂桶式垃圾桶,亟需设计出一种称重结构来适应多规格垃圾桶的称重。
技术实现思路
1、为了解决现有技术中的问题,本实用新型提出了一种多模式挂桶式垃圾车称重结构,能够适应多种规格垃圾桶的称重,提高了称重系统的适用性。
2、为实现上述目的,所采取的技术方案是:
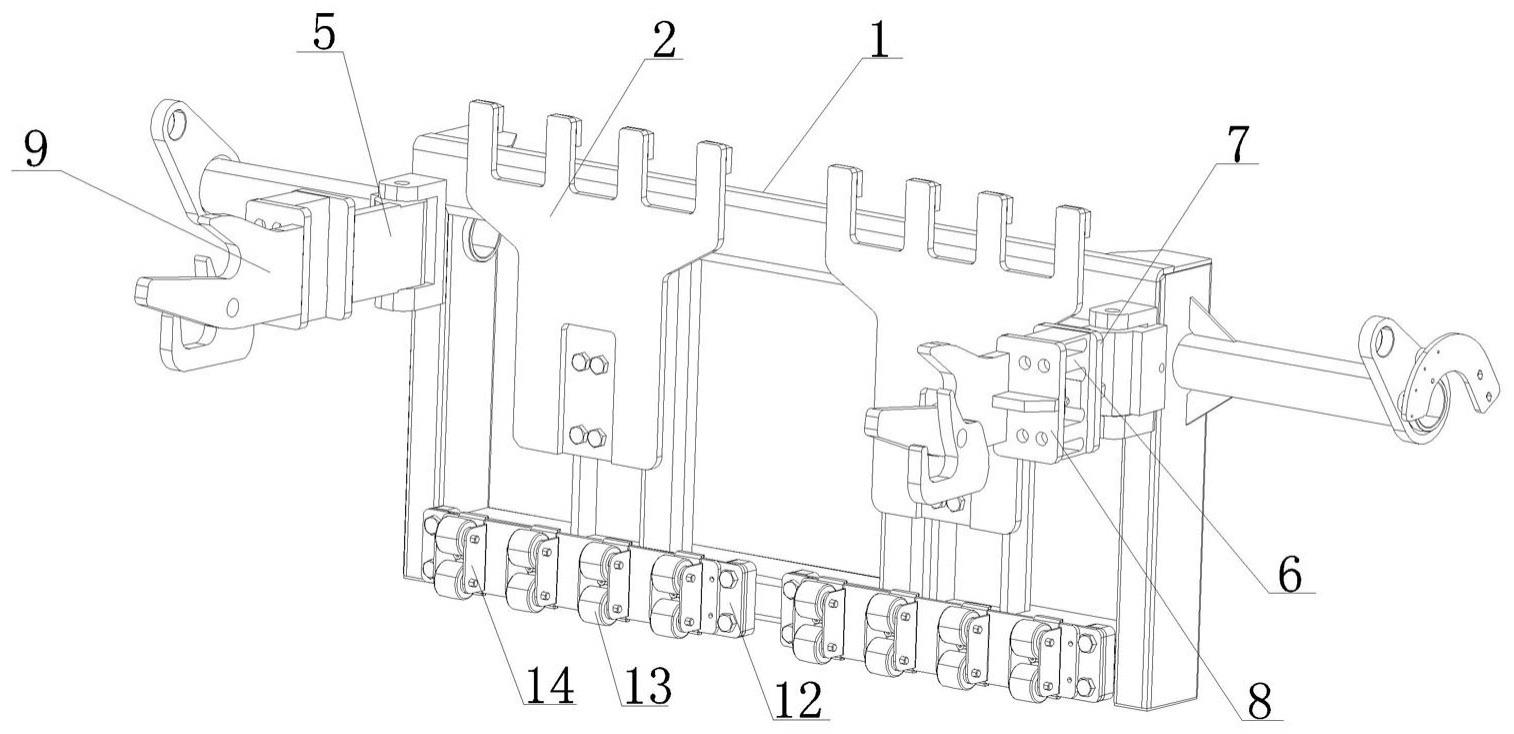
3、本实用新型提供了一种多模式挂桶式垃圾车称重结构,包括安装在车辆尾部的挂桶框架和两个用于挂小垃圾桶的挂板,每个挂板的背面与挂板压力传感器的前部固定连接,所述挂板压力传感器的后部与挂板压力传感器安装支座固定连接,所述挂板压力传感器安装支座固定在挂桶框架上;所述挂桶框架的正面左右端铰接固定第一悬臂,所述第一悬臂与第一悬臂压力传感器安装支座的背面固定连接,所述第一悬臂压力传感器安装支座的正面与悬臂压力传感器的后部固定连接,所述悬臂压力传感器的前部与第二悬臂压力传感器安装支座的背面固定连接,所述第二悬臂压力传感器安装支座的正面与第二悬臂固定连接,左右两个第二悬臂相配合卡住大垃圾桶。
4、根据本实用新型的多模式挂桶式垃圾车称重结构,优选地,所述挂板的背面与挂板压力传感器的前部通过四个螺栓固定连接,所述挂板压力传感器的后部与挂板压力传感器安装支座通过四个螺栓固定连接。
5、根据本实用新型的多模式挂桶式垃圾车称重结构,优选地,所述挂板压力传感器安装支座焊接在挂桶框架上。
6、根据本实用新型的多模式挂桶式垃圾车称重结构,优选地,还包括位于两个挂板下方的两组滚轮组件,每组滚轮组件包括固定支座,所述固定支座的背面焊接在挂桶框架的下侧,所述固定支座的正面并排设置有多组滚轮。
7、根据本实用新型的多模式挂桶式垃圾车称重结构,优选地,每组滚轮包括上下两个滚轮,两个滚轮通过滚轮轴与滚轮支座连接,所述滚轮支座焊接在固定支座上。
8、根据本实用新型的多模式挂桶式垃圾车称重结构,优选地,所述第一悬臂与第一悬臂压力传感器安装支座焊接固定,所述第二悬臂与第二悬臂压力传感器安装支座焊接固定;所述悬臂压力传感器的前后部分别通过四个螺栓固定在第二悬臂压力传感器安装支座和第一悬臂压力传感器安装支座上。
9、采用上述技术方案,所取得的有益效果是:
10、本实用新型的挂桶式垃圾车存在两种收运模式,分别为收运大垃圾桶状态和收运小垃圾桶状态,在不干涉原车收运作业的前提下,每种收运模式均需要加装称重装置,以满足两种收运模式下的实时称重;在小垃圾桶(例如容量规格为120l或者90l)收运过程中,为双桶位收运状态,单个挂板的挂板压力传感器可单独测量称重数据;在大垃圾桶(例如容量规格为660l)收运过程中,为单桶位收运状态,通过在两个悬臂加装悬臂压力传感器测量称重数据,且两种模式运行时互不干涉。本实用新型能够适应多种规格垃圾桶的称重,结构简单、成本低、适用性较强。
技术特征:
1.一种多模式挂桶式垃圾车称重结构,包括安装在车辆尾部的挂桶框架,其特征在于,还包括两个用于挂小垃圾桶的挂板,每个挂板的背面与挂板压力传感器的前部固定连接,所述挂板压力传感器的后部与挂板压力传感器安装支座固定连接,所述挂板压力传感器安装支座固定在挂桶框架上;所述挂桶框架的正面左右端铰接固定第一悬臂,所述第一悬臂与第一悬臂压力传感器安装支座的背面固定连接,所述第一悬臂压力传感器安装支座的正面与悬臂压力传感器的后部固定连接,所述悬臂压力传感器的前部与第二悬臂压力传感器安装支座的背面固定连接,所述第二悬臂压力传感器安装支座的正面与第二悬臂固定连接,左右两个第二悬臂相配合卡住大垃圾桶。
2.根据权利要求1所述的多模式挂桶式垃圾车称重结构,其特征在于,所述挂板的背面与挂板压力传感器的前部通过四个螺栓固定连接,所述挂板压力传感器的后部与挂板压力传感器安装支座通过四个螺栓固定连接。
3.根据权利要求1或者2所述的多模式挂桶式垃圾车称重结构,其特征在于,所述挂板压力传感器安装支座焊接在挂桶框架上。
4.根据权利要求1所述的多模式挂桶式垃圾车称重结构,其特征在于,还包括位于两个挂板下方的两组滚轮组件,每组滚轮组件包括固定支座,所述固定支座的背面焊接在挂桶框架的下侧,所述固定支座的正面并排设置有多组滚轮。
5.根据权利要求4所述的多模式挂桶式垃圾车称重结构,其特征在于,每组滚轮包括上下两个滚轮,两个滚轮通过滚轮轴与滚轮支座连接,所述滚轮支座焊接在固定支座上。
6.根据权利要求1所述的多模式挂桶式垃圾车称重结构,其特征在于,所述第一悬臂与第一悬臂压力传感器安装支座焊接固定,所述第二悬臂与第二悬臂压力传感器安装支座焊接固定;所述悬臂压力传感器的前后部分别通过四个螺栓固定在第二悬臂压力传感器安装支座和第一悬臂压力传感器安装支座上。
技术总结
本技术属于垃圾车称重技术领域,具体涉及一种多模式挂桶式垃圾车称重结构,包括挂桶框架和两个用于挂小垃圾桶的挂板,每个挂板的背面与挂板压力传感器的前部固定连接,挂板压力传感器的后部与挂板压力传感器安装支座固定连接,挂板压力传感器安装支座固定在挂桶框架上;挂桶框架的正面左右端铰接固定第一悬臂,第一悬臂与第一悬臂压力传感器安装支座的背面固定连接,第一悬臂压力传感器安装支座的正面与悬臂压力传感器的后部固定连接,悬臂压力传感器的前部与第二悬臂压力传感器安装支座的背面固定连接,第二悬臂压力传感器安装支座的正面与第二悬臂固定连接。本技术能够适应多种规格垃圾桶的称重,提高了称重系统的适用性。
技术研发人员:黄云鹏,巩鹏亮,徐振东,张甲甲,张宗航
受保护的技术使用者:郑州森鹏电子技术股份有限公司
技术研发日:20230420
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!