用于自动驾驶车辆在道路上停车等候的定位系统及方法与流程
本发明涉及自动驾驶,具体涉及一种用于自动驾驶车辆在道路上停车等候的定位系统、一种用于自动驾驶车辆在道路上停车等候的定位方法、一种计算机程序产品以及一种相应的自动驾驶车辆。
背景技术:
1、随着自动驾驶技术的迅速发展,自动驾驶车辆(automated driving vehicle,adv)在城市道路上的运行变得日益频繁。其中,自动驾驶车辆在道路上的停车等候是一个关键环节,它直接影响到车辆的运行效率和道路安全。然而,现有的自动驾驶车辆的停车定位系统在处理复杂交通环境时往往局限于车辆前方的环境信息,而忽视了相邻车道的动态变化。这一局限性在多车道、频繁变换的交通信号灯以及混合交通流的城市环境中尤为明显。例如,在繁忙的交叉口或有行人横穿的街道上,仅依赖前方环境信息的定位系统可能无法准确判断最佳的停车位置和时机。
2、为此,关于自动驾驶车辆在确定最优的停车地点方面仍存在继续改进的现实需求。
技术实现思路
1、鉴于此,本发明的目的是提供一种改进的用于自动驾驶车辆在道路上停车等候的定位系统、一种改进的用于自动驾驶车辆在道路上停车等候的定位方法、一种改进的计算机程序产品以及一种改进的自动驾驶车辆,以至少解决现有技术中的部分问题和/或克服本文未提及的其他可能的缺点。
2、根据本发明的第一方面,提供了一种用于自动驾驶车辆在道路上停车等候的定位系统,至少包括:获取单元,所述获取单元配置为获取所述自动驾驶车辆在所述道路上的前方环境信息和相邻车道的旁侧环境信息;判断单元,所述判断单元配置为根据所述前方环境信息判断是否需要在前方停车等候;确定单元,所述确定单元配置为当判断结果为需要在前方停车等候时根据所述前方环境信息确定所述自动驾驶车辆的停车地点;优化单元,所述优化单元配置为根据所述旁侧环境信息优化所述停车地点;和控制单元,所述控制单元配置为控制所述自动驾驶车辆自动行驶至经优化的停车地点进行等候。
3、根据本发明的一个可选实施例,所述优化单元还配置为根据所述旁侧环境信息优化所述自动驾驶车辆应行驶至所述停车地点的行驶速度,所述控制单元还配置为控制所述自动驾驶车辆以经优化的行驶速度自动行驶至经优化的停车地点进行等候。
4、根据本发明的一个可选实施例,所述前方环境信息包括所述道路的前方的交通灯及其信号状态和/或停车指示线。
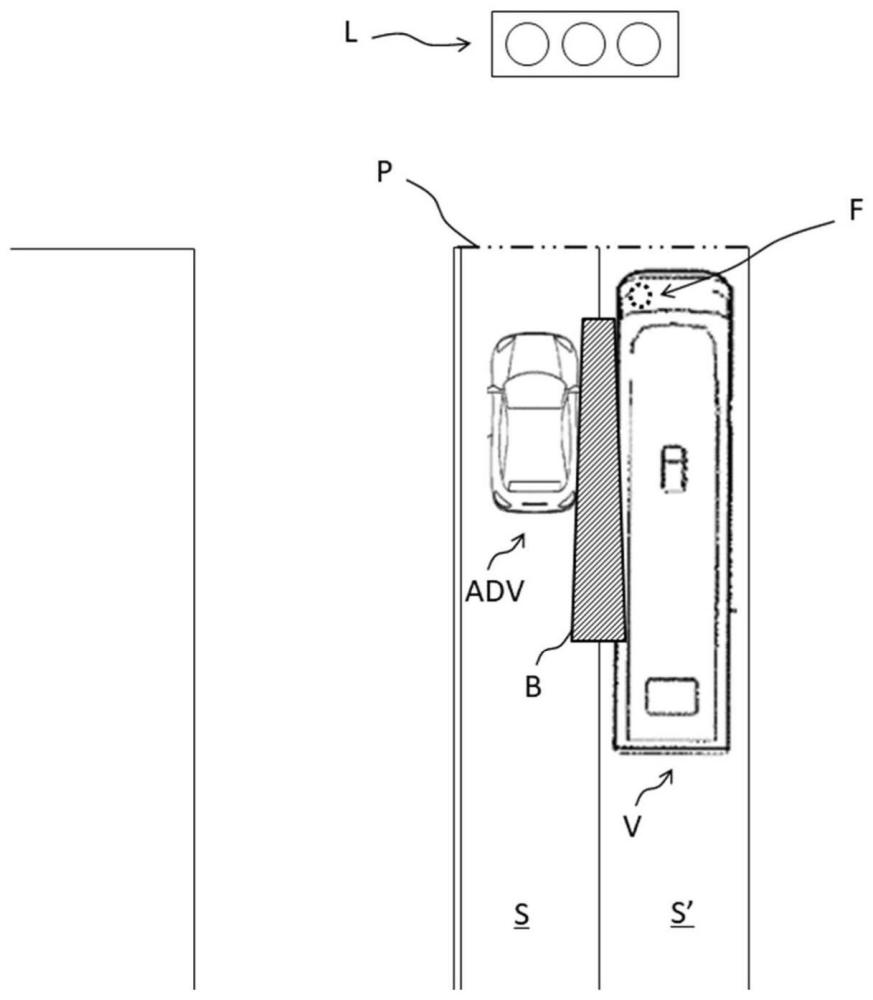
5、根据本发明的一个可选实施例,所述旁侧环境信息包括相邻车道上的大型车辆及其盲区范围和/或驾驶员的视线状态。
6、根据本发明的一个可选实施例,所述获取单元包括设于所述自动驾驶车辆的前向摄像头和/或侧向摄像头和/或v2x通信模块。
7、根据本发明的第二方面,提供了一种用于自动驾驶车辆在道路上停车等候的定位方法,其中,所述定位方法至少包括以下步骤:
8、s100:获取所述自动驾驶车辆在所述道路上的前方环境信息和相邻车道的旁侧环境信息;
9、s200:根据所述前方环境信息判断是否需要在前方停车等候;
10、s300:当判断结果为需要在前方停车等候时,根据所述前方环境信息确定所述自动驾驶车辆的停车地点;
11、s400:根据所述旁侧环境信息优化所述停车地点;
12、s500:控制所述自动驾驶车辆自动行驶至经优化的停车地点进行等候,
13、其中,所述定位方法特别是借助上述第一方面各实施例提供的定位系统实施。
14、根据本发明的一个可选实施例,所述定位方法还包括以下步骤:
15、s401:根据所述旁侧环境信息优化所述自动驾驶车辆应行驶至所述停车地点的行驶速度;
16、s501:控制所述自动驾驶车辆以经优化的行驶速度自动行驶至经优化的停车地点进行等候。
17、根据本发明的一个可选实施例,所述定位方法还包括以下步骤:
18、s210:根据所述前方环境信息判断所述道路前方是否存在交通灯;
19、s310:当判断结果为在所述道路前方存在交通灯时,确定所述交通灯的信号状态以及停车指示线的位置以确定所述停车地点。
20、根据本发明的一个可选实施例,所述定位方法还包括以下步骤:
21、s411:根据所述旁侧环境信息判断在相邻车道上是否存在大型车辆;
22、s412:当判断结果为在相邻车道上存在大型车辆时,获取所述大型车辆的盲区范围;
23、s413:根据所述大型车辆的盲区范围优化所述自动驾驶车辆的停车地点。
24、根据本发明的一个可选实施例,所述定位方法还包括以下步骤:
25、s421:获取所述大型车辆随后的行驶路线;
26、s422:判断所述自动驾驶车辆的停车地点与所述大型车辆随后的行驶路线是否存在发生碰撞的可能性;
27、s423:当判断结果为所述自动驾驶车辆的停车地点与所述大型车辆随后的行驶路线存在发生碰撞的可能性时,获取所述大型车辆的驾驶员的视线状态、特别是驾驶员的注视方向;
28、s424:判断所述大型车辆的驾驶员是否注意到所述自动驾驶车辆;
29、s425:当判断结果为所述大型车辆的驾驶员并未注意到所述自动驾驶车辆时,将所述自动驾驶车辆的停车地点优化为所述大型车辆的驾驶员可注意到的停车地点。
30、根据本发明的一个可选实施例,所述定位方法还包括以下步骤:
31、s431:获取所述自动驾驶车辆在道路上的停车排序位置;
32、s432:获取所述大型车辆在相邻车道上的停车排序位置;
33、s433:判断所述自动驾驶车辆在道路上的停车排序位置和所述大型车辆在相邻车道上的停车排序位置是否均为首位。
34、根据本发明的第三方面,提供了一种计算机程序产品,包括计算机程序指令,其中,所述计算机程序指令被处理器执行时实施上述第二方面各实施例提供的定位方法。
35、根据本发明的第四方面,提供了一种自动驾驶车辆,包括上述第一方面各实施例提供的定位系统和/或上述第三方面各实施例提供的计算机程序产品。
36、通过本发明的实施例,在提高自动驾驶车辆停车安全性和效率的同时,也使自动驾驶车辆能够更好地适应复杂多变的城市交通环境。
技术特征:
1.一种用于自动驾驶车辆(adv)在道路(s)上停车等候的定位系统(1000),其中,所述定位系统(1000)至少包括:
2.根据权利要求1所述的定位系统(1000),其中,
3.一种用于自动驾驶车辆(adv)在道路(s)上停车等候的定位方法(2000),其中,
4.根据权利要求3所述的定位方法(2000),其中,
5.根据权利要求3或4所述的定位方法(2000),其中,
6.根据权利要求3至5中任一项所述的定位方法(2000),其中,
7.根据权利要求3至6中任一项所述的定位方法(2000),其中,
8.根据权利要求7所述的定位方法(2000),其中,
9.一种计算机程序产品,包括计算机程序指令,其中,所述计算机程序指令被处理器执行时实施根据权利要求3至8中任一项所述的定位方法(2000)。
10.一种自动驾驶车辆(adv),包括根据权利要求1或2所述的定位系统(1000)和/或根据权利要求9所述的计算机程序产品。
技术总结
本发明涉及自动驾驶技术领域,具体涉及一种用于自动驾驶车辆在道路上停车等候的定位系统,包括:获取自动驾驶车辆在道路上的前方环境信息和相邻车道的旁侧环境信息的获取单元、根据前方环境信息判断是否需要在前方停车等候的判断单元、根据前方环境信息确定自动驾驶车辆的停车地点的确定单元、根据旁侧环境信息优化停车地点的优化单元以及控制自动驾驶车辆自动行驶至经优化的停车地点进行等候的控制单元。还涉及一种用于自动驾驶车辆在道路上停车等候的定位方法和一种计算机程序产品以及一种相应的自动驾驶车辆。通过本发明的实施例,在提高自动驾驶车辆停车安全性和效率的同时,也使自动驾驶车辆能够更好地适应复杂多变的城市交通环境。
技术研发人员:李和安
受保护的技术使用者:梅赛德斯-奔驰集团股份公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!