车辆控制方法、装置、车载设备、车辆及存储介质与流程
本公开涉及汽车,具体而言,涉及一种车辆控制方法、装置、车载设备、车辆及存储介质。
背景技术:
1、在汽车的自动驾驶或者辅助驾驶场景下,会实时检测汽车附近存在的障碍物,并根据障碍物的位置、移动的速度、方向等控制汽车进行避让。其中,横向辅助控制作为当前汽车常用的一种避障功能,不仅能辅助驾驶员沿着车道行驶,更需要具有一定的针对障碍物、路沿等进行横向避让的功能,以降低横向的碰撞风险,给驾驶员以及乘客更好的驾乘体验。当前的横向避障方法通常是考虑对与障碍物的可能发生碰撞的时间以及可能碰撞的区域,并基于该时间和区域进行行驶路线的规划,这种避障方式存在乘坐体验较差的问题。
技术实现思路
1、本公开实施例至少提供一种车辆控制方法,包括:
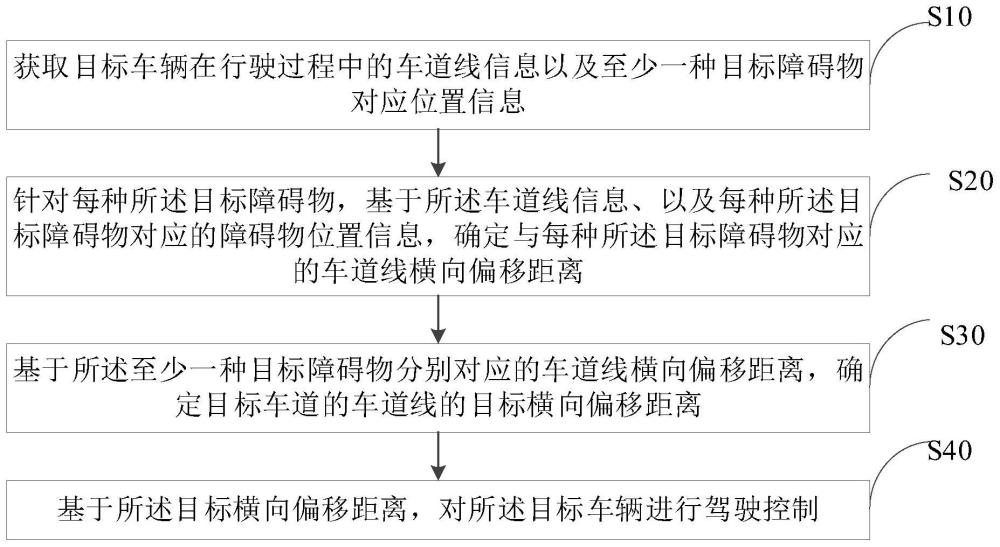
2、获取目标车辆在目标车道行驶过程中的车道线信息以及至少一种目标障碍物对应障碍物位置信息;
3、针对每种所述目标障碍物,基于所述车道线信息、以及每种所述目标障碍物对应的障碍物位置信息,确定与每种所述目标障碍物对应的车道线横向偏移距离;
4、基于所述至少一种目标障碍物分别对应的车道线横向偏移距离,确定目标车道的车道线的目标横向偏移距离;
5、基于所述目标横向偏移距离,对所述目标车辆进行驾驶控制。
6、这样,为不同类型的障碍物,确定自车道左右车道线向避让方向偏离的距离,并根据该距离,控制车辆驾驶,从而能够在保证安全的基础上,保证车辆和障碍物之间能够存在足够的现实距离,减少乘客感知的危险驾驶的体验感,提升乘客乘坐体验。
7、一种可能的实施方式中,所述基于所述车道线信息、以及每种所述目标障碍物对应的障碍物位置信息,确定与每种所述障碍物对应的车道线横向偏移距离,包括:
8、响应于所述目标障碍物属于第一类别,基于所述车道线信息、以及所述目标障碍物对应的障碍物位置信息,确定靠近所述目标障碍物车道线和所述目标障碍物的第一横向距离;
9、基于所述第一横向距离,确定与所述目标障碍物对应的车道线横向偏移距离。
10、一种可能的实施方式中,所述基于所述车道线信息、以及每种所述目标障碍物对应的障碍物位置信息,确定与每种所述障碍物对应的车道线横向偏移距离,还包括:
11、响应于所述目标障碍物属于第二类别,基于所述目标障碍物对应的障碍物位置信息,确定所述目标车辆和所述目标障碍物的第二横向距离;
12、基于所述第二横向距离,确定与所述目标障碍物对应的车道线横向偏移距离。
13、一种可能的实施方式中,所述基于横向距离,确定与所述目标障碍物对应的车道线横向偏移距离,包括:
14、基于所述横向距离,从多个横向距离区间中,确定所述横向距离所属的目标横向距离区间;
15、基于所述目标横向距离区间对应的偏移距离,确定与所述目标障碍物对应的车道线横向偏移距离;
16、其中,所述横向距离包括:第一横向距离或者第二横向距离。
17、一种可能的实施方式中,所述方法还包括:
18、基于所述车道线信息,确定所述目标车道宽度;
19、基于所述目标车道宽度、和/或所述目标车辆的车辆宽度,确定所述横向距离区间、以及与每个所述横向距离区间对应的偏移距离。
20、一种可能的实施方式中,所述基于所述车道线信息、以及每种所述目标障碍物对应的障碍物位置信息,确定与每种所述目标障碍物对应的车道线横向偏移距离,包括:
21、基于所述车道线信息,确定所述车道线和所述目标车辆的第三横向距离;
22、以及根据所述障碍物位置信息,确定所述目标车辆和所述目标障碍物的第四横向距离;
23、基于所述第三横向距离和所述第四横向距离,确定与所述目标障碍物对应的车道线横向偏移距离。
24、一种可能的实施方式中,所述基于所述至少一种目标障碍物分别对应的车道线横向偏移距离,确定目标车道的车道线的目标横向偏移距离,包括:
25、将所述至少一种目标障碍物分别对应的车道线横向偏移距离进行叠加处理,得到目标车道的车道线的目标横向偏移距离。
26、一种可能的实施方式中,所述基于所述目标横向偏移距离,对所述目标车辆进行驾驶控制,包括:
27、基于所述车道线信息、和所述目标横向偏移距离,确定经过偏移后的目标车道线信息;
28、基于所述目标车道线信息,确定中心线信息;
29、控制所述目标车辆沿所述中心线信息所描述的中心线行驶。
30、第二方面,本公开实施例还提供一种车辆控制装置,所述装置包括:
31、获取模块,用于获取目标车辆在目标车道行驶过程中的车道线信息以及至少一种目标障碍物对应障碍物位置信息;
32、第一确定模块,用于针对每种所述目标障碍物,基于所述车道线信息、以及每种所述目标障碍物对应的障碍物位置信息,确定与每种所述目标障碍物对应的车道线横向偏移距离;
33、第二确定模块,用于基于所述至少一种目标障碍物分别对应的车道线横向偏移距离,确定所述目标车辆在所述目标车道上的目标横向偏移距离;
34、控制模块,用于基于所述目标横向偏移距离,对所述目标车辆进行驾驶控制。
35、一种可能的实施方式中,所述第一确定模块,在基于所述车道线信息、以及每种所述目标障碍物对应的障碍物位置信息,确定与每种所述障碍物对应的车道线横向偏移距离时,用于:
36、响应于所述目标障碍物属于第一类别,基于所述车道线信息、以及所述目标障碍物对应的障碍物位置信息,确定靠近所述目标障碍物车道线和所述目标障碍物的第一横向距离;
37、基于所述第一横向距离,确定与所述目标障碍物对应的车道线横向偏移距离。
38、一种可能的实施方式中,所述第一确定模块,在基于所述车道线信息、以及每种所述目标障碍物对应的障碍物位置信息,确定与每种所述障碍物对应的车道线横向偏移距离时,还用于:
39、响应于所述目标障碍物属于第二类别,基于所述目标障碍物对应的障碍物位置信息,确定所述目标车辆和所述目标障碍物的第二横向距离;
40、基于所述第二横向距离,确定与所述目标障碍物对应的车道线横向偏移距离。
41、一种可能的实施方式中,所述第一确定模块,在基于横向距离,确定与所述目标障碍物对应的车道线横向偏移距离时,用于:
42、基于所述横向距离,从多个横向距离区间中,确定所述横向距离所属的目标横向距离区间;
43、基于所述目标横向距离区间对应的偏移距离,确定与所述目标障碍物对应的车道线横向偏移距离;
44、其中,所述横向距离包括:第一横向距离或者第二横向距离。
45、一种可能的实施方式中,所述第一确定模块,还用于:
46、基于所述车道线信息,确定所述目标车道宽度;
47、基于所述目标车道宽度、和/或所述目标车辆的车辆宽度,确定所述横向距离区间、以及与每个所述横向距离区间对应的偏移距离。
48、一种可能的实施方式中,所述第一确定模块,在基于所述车道线信息、以及每种所述目标障碍物对应的障碍物位置信息,确定与每种所述目标障碍物对应的车道线横向偏移距离时,用于:
49、基于所述车道线信息,确定所述车道线和所述目标车辆的第三横向距离;
50、以及根据所述障碍物位置信息,确定所述目标车辆和所述目标障碍物的第四横向距离;
51、基于所述第三横向距离和所述第四横向距离,确定与所述目标障碍物对应的车道线横向偏移距离。
52、一种可能的实施方式中,所述第二确定模块,在基于所述至少一种目标障碍物分别对应的车道线横向偏移距离,确定目标车道的车道线的目标横向偏移距离,包括:
53、将所述至少一种目标障碍物分别对应的车道线横向偏移距离进行叠加处理,得到目标车道的车道线的目标横向偏移距离。
54、一种可能的实施方式中,所述控制模块,在基于所述目标横向偏移距离,对所述目标车辆进行驾驶控制时,用于:
55、基于所述车道线信息、和所述目标横向偏移距离,确定经过偏移后的目标车道线信息;
56、基于所述目标车道线信息,确定中心线信息;
57、控制所述目标车辆沿所述中心线信息所描述的中心线行驶。
58、第三方面,本公开可选实现方式还提供一种车载设备,包括上述第二方面、或第二方面中任一种可能的车辆控制装置。
59、第四方面,本公开可选实现方式还提供一种车辆,包括上述第二方面、或第二方面中任一种可能的车辆控制装置,或者包括上述第三方面所述的车载设备。
60、第五方面,本公开可选实现方式还提供一种计算机设备,处理器、存储器,所述存储器存储有所述处理器可执行的机器可读指令,所述处理器用于执行所述存储器中存储的机器可读指令,所述机器可读指令被所述处理器执行时,所述机器可读指令被所述处理器执行时执行上述第一方面,或第一方面中任一种可能的实施方式中的步骤。
61、第六方面,本公开可选实现方式还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被运行时执行上述第一方面,或第一方面中任一种可能的实施方式中的步骤。
62、关于上述车辆控制装置、车载设备、车辆计算机设备、及计算机可读存储介质的效果描述参见上述车辆控制方法的说明,这里不再赘述。
63、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,而非限制本公开的技术方案。
64、为使本公开的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!