驱动轮抱死的路面状态识别方法、装置、控制器及车辆与流程
本发明涉及车辆控制,尤其涉及一种驱动轮抱死的路面状态识别方法、装置、控制器及车辆。
背景技术:
1、随着车辆在人们生活中的普及程度的提高,人们对车辆安全性能的要求也越来越高。
2、车辆的制动方式由原来的机械制动演变为电子制动,电控制动系统(electronically controlled brake system,ebs)搭载防抱死制动系统(antilock brakesystem,abs)、车身电子稳定控制系统(electronic stability controller,esc)和驱动防滑系统(acceleration slip regulation,asr)等制动功能,可以有效地提升车辆的制动性能,提高驾乘人员的安全性和舒适性。而这些制动系统的制动性能与路面识别的准确率有很大的关系。
3、然而,目前的路面识别的准确率较低,导致车辆的制动性能下降,降低了车辆的安全性。
技术实现思路
1、本发明实施例提供了一种驱动轮抱死的路面状态识别方法、装置、控制器及车辆,以解决目前路面识别的准确率较低的问题。
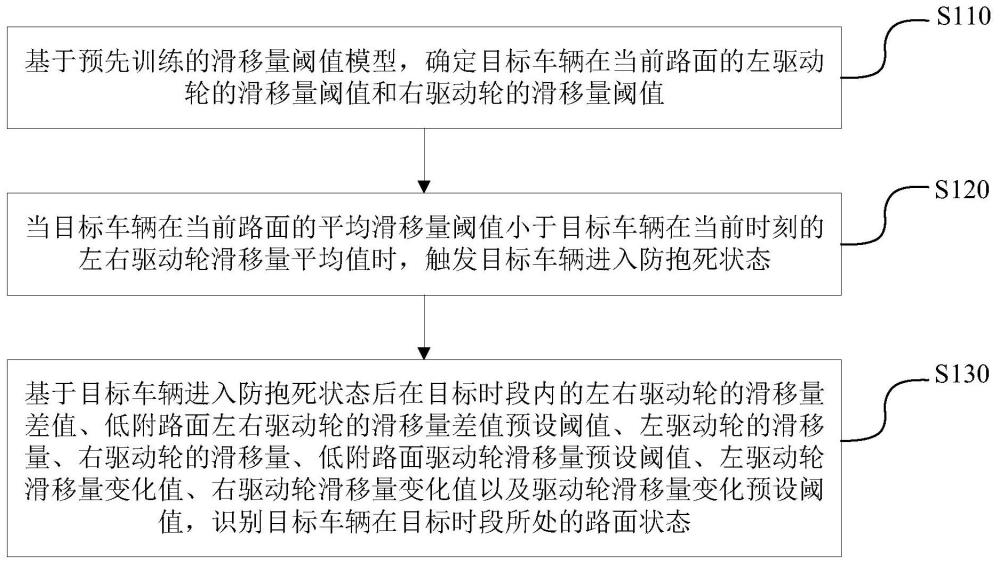
2、第一方面,本发明实施例提供了一种驱动轮抱死的路面状态识别方法,包括:基于预先训练的滑移量阈值模型,确定目标车辆在当前路面的左驱动轮的滑移量阈值和右驱动轮的滑移量阈值;
3、当目标车辆在当前路面的平均滑移量阈值小于目标车辆在当前时刻的左右驱动轮滑移量平均值时,触发目标车辆进入防抱死状态;其中,左右驱动轮滑移量平均值为目标车辆在当前时刻的左驱动轮的滑移量和右驱动轮的滑移量的平均值,当前路面的平均滑移量阈值为目标车辆在当前路面的左驱动轮的滑移量阈值和右驱动轮的滑移量阈值的平均值;
4、基于目标车辆进入防抱死状态后在目标时段内的左右驱动轮的滑移量差值、低附路面左右驱动轮的滑移量差值预设阈值、左驱动轮的滑移量、右驱动轮的滑移量以及低附路面驱动轮滑移量预设阈值,识别目标车辆在目标时段所处的路面状态。
5、在一种可能的实现方式中,基于预先训练的滑移量阈值模型,确定目标车辆在当前路面的左驱动轮的滑移量阈值和右驱动轮的滑移量阈值,包括:
6、获取目标车辆在当前时刻的车速、左驱动轮的轮速和右驱动轮的轮速;
7、基于目标车辆在当前时刻的车速和左驱动轮的轮速,确定目标车辆在当前时刻的左驱动轮的滑移率;
8、基于目标车辆在当前时刻的车速和右驱动轮的轮速,确定目标车辆在当前时刻的右驱动轮的滑移率;
9、基于目标车辆在当前路面的地面制动力,确定目标车辆在当前路面的制动力系数;
10、将目标车辆在当前路面的制动力系数和当前时刻的左驱动轮的滑移率输入至滑移量阈值模型中,得到目标车辆在当前路面的左驱动轮的滑移量阈值;
11、将目标车辆在当前路面的制动力系数和当前时刻的右驱动轮的滑移率输入至滑移量阈值模型中,得到目标车辆在当前路面的右驱动轮的滑移量阈值。
12、在一种可能的实现方式中,基于目标车辆进入防抱死状态后在目标时段内的左右驱动轮的滑移量差值、低附路面左右驱动轮的滑移量差值预设阈值、左驱动轮的滑移量、右驱动轮的滑移量以及低附路面驱动轮滑移量预设阈值,识别目标车辆在目标时段所处的路面状态,包括:
13、当目标车辆在目标时刻的左右驱动轮的滑移量差值大于低附路面左右驱动轮的滑移量差值预设阈值,且目标时刻的左驱动轮的滑移量和目标时刻的右驱动轮的滑移量均大于低附路面驱动轮滑移量预设阈值时,则确定目标车辆在目标时刻的路面为低附路面;当在目标时段内确定为低附路面的次数大于或者等于低附路面次数阈值时,则确定目标车辆在目标时段所处的路面状态为均一低附路面;其中,目标时刻为目标时段内的任意一个时刻。
14、在一种可能的实现方式中,基于目标车辆进入防抱死状态后在目标时段内的左右驱动轮的滑移量差值、低附路面左右驱动轮的滑移量差值预设阈值、左驱动轮的滑移量、右驱动轮的滑移量以及低附路面驱动轮滑移量预设阈值,识别目标车辆在目标时段所处的路面状态,还包括:
15、当目标车辆在目标时段内的左驱动轮的滑移量变化值大于驱动轮滑移量变化预设阈值,或当目标时段内的左右驱动轮的滑移量差值之和大于左右驱动轮滑移量差值累加阈值时,则确定目标车辆在目标时段所处的路面状态为左边低附对开路面;或
16、当目标时段内的右驱动轮的滑移量变化值大于驱动轮滑移量变化预设阈值,或当目标时段内的左右驱动轮的滑移量差值之和小于左右驱动轮滑移量差值累加阈值时,则确定目标车辆在目标时段所处的路面状态为右边低附对开路面;其中,目标时刻为目标时段内的任意一个时刻。
17、在一种可能的实现方式中,左右驱动轮的滑移量差值为左驱动轮的滑移量减去右驱动轮的滑移量;
18、左驱动轮在目标时刻的滑移量等于目标车辆的两个非驱动轮在目标时刻的平均轮速与左驱动轮在目标时刻的轮速的差值;
19、右驱动轮在目标时刻的滑移量等于目标车辆的两个非驱动轮在目标时刻的平均轮速与右驱动轮在目标时刻的轮速的差值。
20、在一种可能的实现方式中,识别目标车辆在目标时段所处的路面状态后,还包括:
21、基于目标车辆在目标时段所处的路面状态、目标车辆在目标时刻的左驱动轮的减速度、右驱动轮的减速度、车轮预设减速度阈值和车轮预设加速度阈值,对目标车辆的左驱动轮和右驱动轮的制动气压进行调节;其中,路面状态在一段时间内保持不变。
22、在一种可能的实现方式中,对目标车辆的左驱动轮和右驱动轮的制动气压进行调节,包括:
23、若确定目标车辆在目标时段所处的路面状态为均一低附路面,则重复执行第一制动气压调节过程;其中,第一制动气压调节过程包括当左驱动轮和右驱动轮的减速度等于车轮预设减速度阈值时,控制左驱动轮和右驱动轮开始减压,当左驱动轮和右驱动轮的减速度等于车轮预设加速度阈值时,控制左驱动轮和右驱动轮开始保压,当左驱动轮和右驱动轮的减速度小于车轮预设加速度阈值时,控制左驱动轮和右驱动轮开始增压;
24、若确定目标车辆在目标时段所处的路面状态为右边低附对开路面,则重复执行第二制动气压调节过程;其中,第二制动气压调节过程包括当右驱动轮的减速度等于减速度阈值时,控制右驱动轮开始减压左驱动轮开始保压,当右驱动轮的减速度等于加速度阈值时,控制右驱动轮开始保压左驱动轮开始减压,当右驱动轮的减速度小于加速度阈值时,控制右驱动轮和左驱动轮同时增压;
25、若确定目标车辆在目标时段所处的路面状态为左边低附对开路面,则重复执行第三制动气压调节过程;其中,第三制动气压调节过程包括当左驱动轮的减速度等于减速度阈值时,控制左驱动轮开始减压右驱动轮开始保压,当左驱动轮的减速度等于加速度阈值时,控制左驱动轮开始保压右驱动轮开始减压,当左驱动轮的减速度小于加速度阈值时,控制左驱动轮和右驱动轮同时增压。
26、第二方面,本发明实施例提供了一种驱动轮抱死的路面状态识别装置,包括:
27、确定模块,用于基于预先训练的滑移量阈值模型,确定目标车辆在当前路面的左驱动轮的滑移量阈值和右驱动轮的滑移量阈值;
28、触发模块,用于当目标车辆在当前路面的平均滑移量阈值小于目标车辆在当前时刻的左右驱动轮滑移量平均值时,触发目标车辆进入防抱死状态;其中,左右驱动轮滑移量平均值为目标车辆在当前时刻的左驱动轮的滑移量和右驱动轮的滑移量的平均值,当前路面的平均滑移量阈值为目标车辆在当前路面的左驱动轮的滑移量阈值和右驱动轮的滑移量阈值的平均值;
29、识别模块,用于基于目标车辆进入防抱死状态后在目标时段内的左右驱动轮的滑移量差值、低附路面左右驱动轮的滑移量差值预设阈值、左驱动轮的滑移量、右驱动轮的滑移量以及低附路面驱动轮滑移量预设阈值,识别目标车辆在目标时段所处的路面状态。
30、第三方面,本发明实施例提供了一种控制器,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上第一方面或第一方面的任一种可能的实现方式所述方法的步骤。
31、第四方面,本发明实施例提供了一种车辆,包括第三方面的控制器。
32、本发明提供的驱动轮抱死的路面状态识别方法、装置、控制器及车辆,首先,基于预先训练的滑移量阈值模型,确定目标车辆在当前路面的左驱动轮的滑移量阈值和右驱动轮的滑移量阈值。然后,当目标车辆在当前路面的平均滑移量阈值小于目标车辆在当前时刻的左右驱动轮滑移量平均值时,触发目标车辆进入防抱死状态。最后,基于目标车辆进入防抱死状态后在目标时段内的左右驱动轮的滑移量差值、低附路面左右驱动轮的滑移量差值预设阈值、左驱动轮的滑移量、右驱动轮的滑移量、低附路面驱动轮滑移量预设阈值、左驱动轮滑移量变化值、右驱动轮滑移量变化值以及驱动轮滑移量变化预设阈值,识别目标车辆在目标时段所处的路面状态。本发明通过滑移量阈值模型可以准确地确定目标车辆在当前路面的左驱动轮的滑移量阈值和右驱动轮的滑移量阈值,然后,基于当前路面的平均滑移量阈值和左右驱动轮滑移量平均值确定车辆是否进入防抱死状态。当确定车辆进入防抱死状态时,则基于车辆的左驱动轮的滑移量、右驱动轮的滑移量、低附路面左右驱动轮的滑移量差值预设阈值、低附路面驱动轮滑移量预设阈值,准确地识别车辆所处的路面状态。
- 还没有人留言评论。精彩留言会获得点赞!