一种用于多种工程车辆自动调平和收回的控制系统的制作方法
本发明涉及车辆调平和收回控制,尤其涉及一种用于多种工程车辆自动调平和收回的控制系统。
背景技术:
1、调平需求广泛存在于多种场景,如高空作业车、履带蜘蛛车、随车吊、起重机、混凝土泵车、钻机、应急方舱等工程车辆及其他特种装备。
2、目前人工调平仍大量存在各个厂商和企业的产品中,其操作方法是手动控制每条单独支腿的伸缩开关,达到抬升和下放车辆装备的目的,在操作中以肉眼观察水平仪的显示角度,来判断装备是否调整到水平状态。人工调平操作具有较大随机性,有调平效果不一、操作复杂、花费时间长等特点,容易对作业过程造成安全隐患。
3、除人工调平之外,电控调平也已出现在多种工程车辆中。现有的大多采用整车控制集成调平,是指将调平功能集成在整车控制中的方式。这种调平专门针对某一种车辆型号开发,适用范围窄、针对性强、耦合度高,维护困难,不利于后续开发。
4、因此,有必要设计一种新的调平方案,将调平控制从整车控制中分离出来,降低耦合度,并能适用于多种常见车辆或设备,实现通用化调平控制。
技术实现思路
1、本发明要解决的技术问题是提供一种用于多种工程车辆自动调平和收回的控制系统。
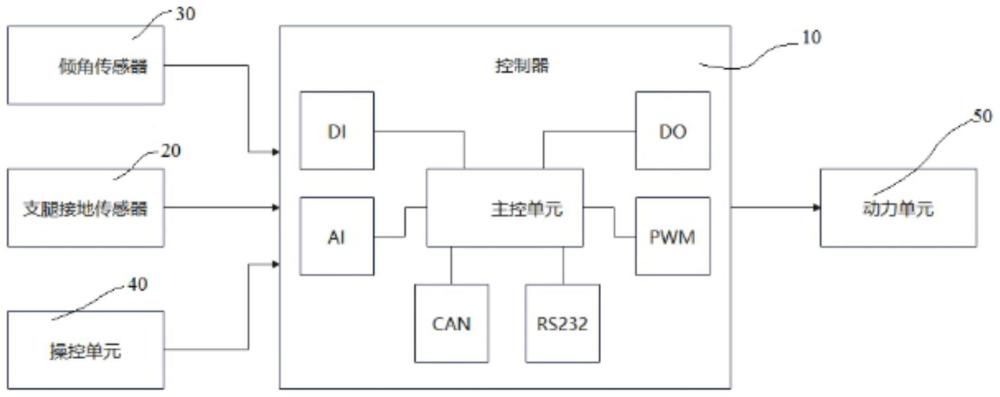
2、为解决上述技术问题,本发明的目的是通过以下技术方案实现的:提供一种用于多种工程车辆自动调平和收回的控制系统,包括:控制器、支腿接地传感器、倾角传感器、操控单元以及动力单元;所述支腿接地传感器、所述倾角传感器、所述操控单元以及所述动力单元分别与所述控制器连接;所述控制器,用于分析所述支腿接地传感器和倾角传感器采集的数据、获取所述操控单元输入的指令,根据当前倾角、接地状态和指令计算出当前应进行的动作,输出对应的信号到所述动力单元,控制支腿进行动作。
3、其进一步技术方案为:所述控制器包括主控单元、di数字输入模块、ai模拟输入模块以及do数字输出模块、pwm脉宽调制输出模块、can总线模块、rs232串口线路模块;所述倾角传感器根据实际装配的传感器输出类型连接所述ai模拟输入模块或所述can总线模块;所述支腿接地传感器根据实际装配的传感器输出类型连接所述di数字输入模块或所述ai模拟输入模块;所述操控单元根据实际电气控制方式连接所述di数字输入模块或所述ai输入模块或所述can总线模块;所述动力单元根据实际采用的动力系统控制结构连接所述pwm脉宽调制输出模块或do数字输出模块或can总线模块。
4、其进一步技术方案为:所述主控单元,用于预设多种输入接口方案及通信协议,根据多种不同车型的控制要求,配置参数采用合适的输入接口方案或通信协议,满足不同车型条件下不同所述支腿接地传感器、不同所述操控单元的通讯方式及不同所述倾角传感器的对接需求。
5、其进一步技术方案为:所述主控单元用于预设多种动作控制方案及独立动作阶段,根据多种不同车型的控制要求,配置参数采用动作控制方案,或独立动作阶段组合获得完整的自动动作过程,以满足不同车型基于安全性需求的自动控制动作差异。
6、其进一步技术方案为:所述主控单元,用于预设多种输出接口方案及通信协议,根据多种不同车型的控制要求,配置参数采用合适的输出接口方案及通信协议,以满足不同车型因实际采用动力系统不同导致的控制器输出控制差异。
7、其进一步技术方案为:所述主控单元,采用了统一的姿态参数,根据所述多种输入接口方案得到的数据分别按照各自的接口方案计算出统一格式的姿态参数,并根据所述姿态参数计算动作,其中,统一的姿态参数包括各支腿接地状态参数、车体倾角参数、支腿压力参数、支腿承受重量参数、支腿全伸状态参数、支腿全缩状态参数、接地支腿数量参数、全支腿接地状态参数、水平判定状态参数、双轴高低姿态判定状态参数、双轴倾斜姿态判定状态参数。
8、其进一步技术方案为:所述主控单元包括一键调平模块,所述一键调平模块,用于对一键调平的所有可能进行的自动动作进行了分解,划分为若干个独立的组合动作,每一个独立的组合动作为一个动作阶段,其中,每个动作阶段均包含阶段超时处理、阶段内各支腿正常动作、阶段异常或执行条件不足时的处理以及阶段结束处理,根据车辆或设备的具体需要,通过pc调试终端启用和排列若干个动作阶段,组合出完整的一键调平过程,在操作过程中,所述一键调平模块根据用户对所述操控单元的操作生成一键调平驱动信号,并结合车辆类型,驱动所述动作单元按照配置的方案和实时姿态进行一键调平,直到根据配置的方案确定动作完成后结束或者因松开按钮或出现急停信号或出现干涉或出现危险动作倾向结束。
9、其进一步技术方案为:所述主控单元包括一键收腿模块,所述一键收腿模块,用于对一键收腿的所有可能进行的自动动作进行了分解,划分为若干个独立的组合动作,每一个独立的组合动作为一个动作阶段,其中,每个动作阶段包含阶段超时处理、阶段内各支腿正常动作、阶段异常或执行条件不足时的处理以及阶段结束处理,根据车辆或设备的具体需要,通过pc调试终端启用和排列若干个动作阶段,组合出完整的一键收腿过程,在操作过程中,所述一键收腿模块根据用户对所述操控单元的操作生成一键收腿驱动信号,并结合车辆类型,驱动所述动作单元按照配置的方案和实时姿态进行一键收腿,直到相应方案确定收腿结束或者因松开按钮或出现急停信号或出现干涉或出现危险动作倾向结束。
10、其进一步技术方案为:所述主控单元包括一键撑腿模块,所述一键撑腿模块,用于对一键撑腿的所有可能进行的自动动作进行了分解,划分为若干个独立的组合动作,每一个独立的组合动作为一个动作阶段,每个动作阶段均包含阶段超时处理、阶段内各支腿正常动作、阶段异常或执行条件不足时的处理以及阶段结束处理,根据车辆或设备的具体需要,通过pc调试终端启用和排列若干个动作阶段,组合出完整的一键撑腿过程,在操作过程中,所述一键撑腿模块根据用户对所述操控单元的操作生成一键撑腿驱动信号,配置一个伸出扩张腿的时间,并结合车辆类型,驱动所述动作单元按照配置的方案和实时姿态进行一键撑腿,直到相应方案确定撑腿结束或者因松开按钮或出现急停信号或出现干涉或出现危险动作倾向结束。
11、其进一步技术方案为:所述主控单元还包括动作速度控制模块,所述动作速度控制模块,用于根据倾角传感器的数值实时计算动作支腿的速度,并控制每段支腿在一键调平、一键收腿和一键撑腿中的速度
12、本发明与现有技术相比的有益效果是:本发明通过所述多种预设输入接口方案及通信协议,满足了多种常见车辆设备类型条件下的调平操控要求,在所述主控单元中根据所述输入接口及通讯协议的配置计算整理出统一格式的姿态数据和指令数据,再由分裂组合式的动作控制算法根据当前姿态和指令数据计算当前应采取的行为动作,满足了多种常见车辆设备类型条件下的不同动作要求,最后通过所述多种输出接口方案及通信协议将计算的动作输出,满足了多种常见车辆设备类型条件下的不同动力控制系统的控制要求,实现独立调平控制,并提供对多种动力方案和多种控制需求的适应性,满足快速适配多种车型的目的。
13、下面结合附图和具体实施例对本发明作进一步描述。
- 还没有人留言评论。精彩留言会获得点赞!