列车筛选方法、筛选控制器及列车信号系统与流程
本发明涉及列车运行控制,尤其涉及一种列车筛选方法、筛选控制器及列车信号系统。
背景技术:
1、当前目标列车在升级为cbtc(communication based train control的简称,即基于通信的列车控制)模式前,列车信号系统中的区域控制器(zone controller,以下简称为zc)为了保证目标列车前后一定范围内没有存在未知风险列车,需要进行列车筛选。该未知风险列车是指在目标列车前后一定范围内隐藏位置或者没有汇报位置的列车,该未知风险列车的存在,会给目标列车的安全行驶带来安全风险。列车筛选是zc为列车计算移动授权的前提条件之一,需确保zc计算的特定范围内不存在未知风险列车,从而确保目标列车在cbtc模式下安全运行。
2、现有列车信号系统中,目标列车向zc汇报列车位置,zc根据列车位置确定其所在物理区段是否存在除本车以外是否还包含未知风险列车,并检查其前后物理区段的列车占用情况,以实现列车筛选功能。例如,zc在列车位置与其所在物理区段的计轴设备之间的距离小于预设阈值时,认定所在物理区段不存在除本车以外的未知风险列车;检查其前后物理区段的空闲时长,以确定其前后物理区段是否存在未知风险列车。这种列车筛选方法需要安装计轴设备,且需要控制目标列车的停车位置,使其与所在物理区段的计轴设备的距离小于预设阈值,才认定满足列车筛选条件,极大程度上限制列车筛选的灵活性和成功率,导致列车筛选成为制约目标列车升级为cbtc模式运行的难题。
技术实现思路
1、本发明实施例提供一种列车筛选方法、筛选控制器及列车信号系统,以解决现有依赖计轴设备进行列车筛选所存在的灵活性和成功率较低的问题。
2、本发明实施例提供一种列车筛选方法,包括:
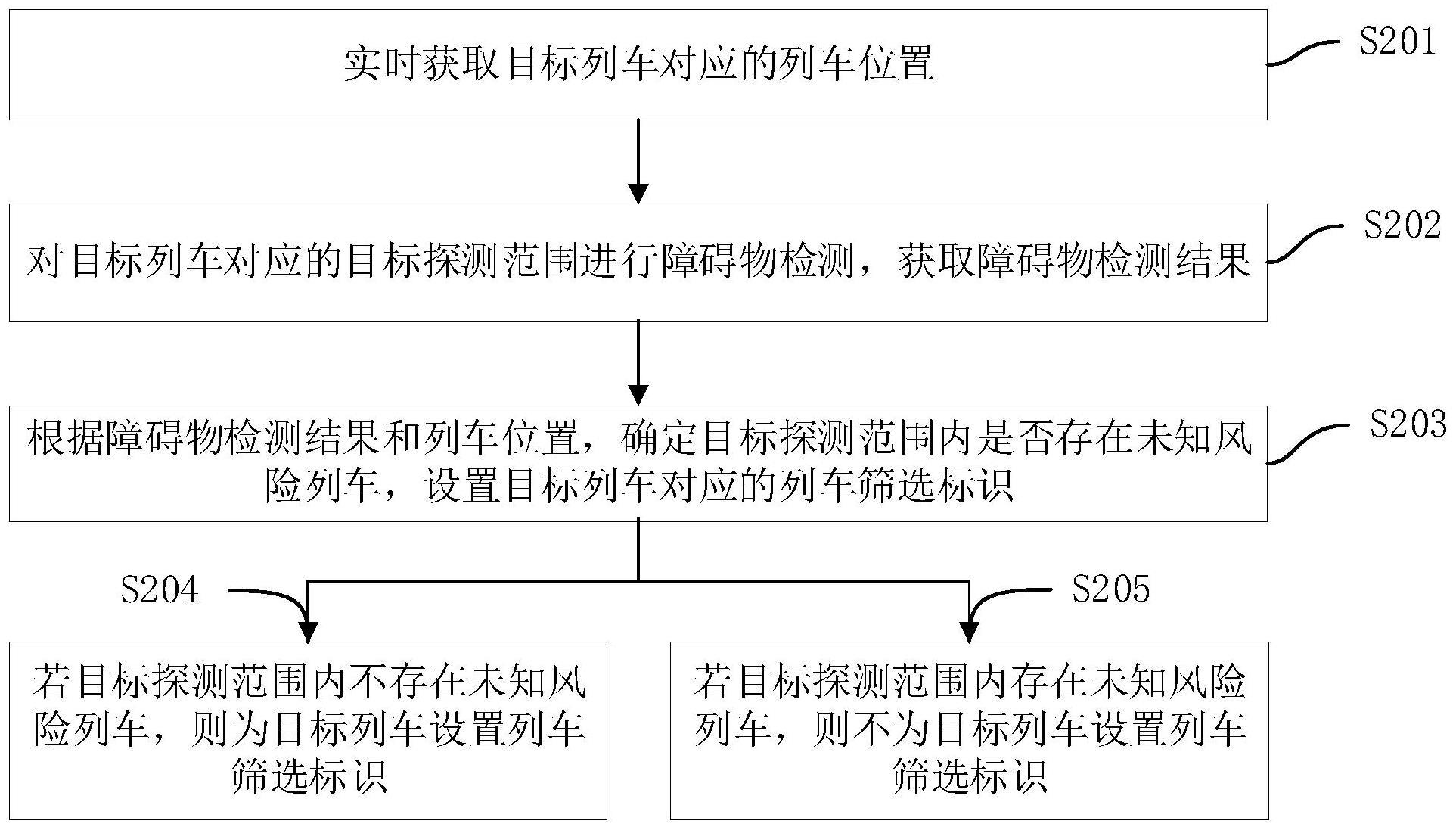
3、实时获取目标列车对应的列车位置;
4、对所述目标列车对应的目标探测范围进行障碍物检测,获取障碍物检测结果;
5、根据所述障碍物检测结果和所述列车位置,确定所述目标探测范围内是否存在未知风险列车;
6、若所述目标探测范围内不存在未知风险列车,则为所述目标列车设置列车筛选标识;
7、若所述目标探测范围内存在未知风险列车,则不为所述目标列车设置列车筛选标识。
8、优选地,所述对所述目标列车对应的目标探测范围进行障碍物检测,获取障碍物检测结果,包括:
9、对所述目标列车对应的目标探测范围进行障碍物检测;
10、若所述目标探测范围内不存在障碍物,则获取不存在障碍物的障碍物检测结果;
11、若所述目标探测范围内存在障碍物,则获取当前障碍物图像,将所述当前障碍物图像与已有列车图像进行相似度计算,获取图像相似度;
12、若所述图像相似度大于目标相似度,则获取存在障碍列车的障碍物检测结果;
13、若所述图像相似度不大于目标相似度,则获取存在非障碍列车的障碍物检测结果。
14、优选地,所述根据所述障碍物检测结果和所述列车位置,确定所述目标探测范围内是否存在未知风险列车,包括:
15、若所述障碍物检测结果为不存在障碍物,或者,所述障碍物检测结果为存在非障碍列车,则确定所述目标探测范围内不存在未知风险列车;
16、若所述障碍物检测结果为存在障碍列车,则获取所述障碍列车和所述目标列车之间的车间距离,根据所述车间距离和所述列车位置,确定所述目标探测范围内是否存在未知风险列车。
17、优选地,所述根据所述障碍物检测结果和所述列车位置,确定所述目标探测范围内是否存在未知风险列车,包括:
18、根据所述车间距离和所述列车位置,确定所述障碍列车对应的列车类型;
19、若所述障碍列车对应的列车类型为自动列车,则确定所述目标探测范围内不存在未知风险列车;
20、若所述障碍列车对应的列车类型为非装备列车,则确定所述目标探测范围内存在未知风险列车。
21、优选地,所述根据所述车间距离和所述列车位置,确定所述障碍列车对应的列车类型,包括:
22、根据当前时刻对应的车间距离和当前时刻对应的列车位置,确定障碍列车对应的障碍物实测位置;
23、根据上一时刻对应的车间距离和上一时刻对应的列车位置,确定障碍列车对应的障碍物参考位置;
24、根据所述障碍物实测位置和所述障碍物参考位置,确定所述障碍列车对应的列车类型。
25、优选地,所述根据当前时刻对应的车间距离和当前时刻对应的列车位置,确定障碍列车对应的障碍物实测位置,包括:
26、采用车前探测范围对应的实测位置计算公式为pb=pa1+l1,对当前时刻对应的车间距离和当前时刻对应的列车位置进行处理,获取障碍列车对应的障碍物实测位置;
27、或者,
28、采用车后探测范围对应的实测位置计算公式pb=pa1-l1,对当前时刻对应的车间距离和当前时刻对应的列车位置进行处理,获取障碍列车对应的障碍物实测位置;
29、其中,pb为障碍物实测位置,pa1为当前时刻对应的列车位置,l1为当前时刻对应的车间距离。
30、优选地,所述根据上一时刻对应的车间距离和上一时刻对应的列车位置,确定障碍列车对应的障碍物参考位置,包括:
31、采用车前探测范围对应的参考位置计算公式pc=pa0+l0+vut*tdc,对上一时刻对应的车间距离和上一时刻对应的列车位置进行处理,获取障碍列车对应的障碍物参考位置;
32、或者,
33、采用车后探测范围对应的参考位置计算公式pc=pa0-l0+vut*tdc,对上一时刻对应的车间距离和上一时刻对应的列车位置进行处理,获取障碍列车对应的障碍物参考位置;
34、其中,pc为障碍物参考位置,pa0为上一时刻对应的列车位置,l0为上一时刻对应的车间距离,vut为非装备列车的最高车速,tdc为当前通信延时。
35、优选地,所述根据所述障碍物参考位置和所述障碍物实测位置,确定所述障碍列车对应的列车类型,包括:
36、若所述障碍物实测位置大于所述障碍物参考位置,则确定所述障碍列车对应的列车类型为自动列车;
37、若所述障碍物实测位置不大于所述障碍物参考位置,则确定所述障碍列车对应的列车类型为非装备列车。
38、本发明实施例提供一种筛选控制器,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述列车筛选方法。
39、本发明实施例提供一种列车信号系统,包括上述筛选控制器,所述筛选控制器为区域控制器或者车载控制器。
40、上述列车筛选方法、筛选控制器及列车信号系统,利用障碍物检测结果和列车位置,判定目标探测范围内是否存在未知风险列车,进而设置所述目标列车对应的列车筛选标识,其列车筛选过程无需额外设置计轴设备,有助于减少列车筛选的成本;且列车筛选过程也无需控制目标列车在特定位置停车,不会对目标列车对应的前后物理区段有限制,有助于提高列车筛选的灵活性和成功率。
- 还没有人留言评论。精彩留言会获得点赞!