一种铁路桥梁检测车的制作方法
1.本发明涉及铁路工程车辆技术领域,具体涉及一种铁路桥梁检车。
背景技术:
2.目前,铁路桥梁病害采用脚手架、望远镜、无人机、检查轨道车等设备进行检查作业。以上作业方式中,望远镜及无人机主要用于桥梁表面的病害的检查,检出效率低下、作业覆盖范围有限,且无人机操作性要求很高;脚手架主要用于搭载人员进行较低桥梁的表面病害检查及记录,安全防护较差,作业风险高;检查车主要用于搭载人员下探到桥梁下方进行桥梁的表面病害检查及记录,也可进行微小病害的维修保养,但该方式在每跨间作业存在绕杆缺陷,即作业装置遇到立柱后需要回收作业装置后再移动车辆进行下一跨间的检查作业,因此作业效率低,安全风险较高。
3.依据铁路桥梁维护管理文件要求,桥梁的维护遵循“检、修分离”的原则,检查的效率及安全防护问题是当务之急,修理主要是基于检查后的频发或重大问题实施作业。因此,为了实现桥梁检查,需研制一种智能化桥梁检测设备。
技术实现要素:
4.本发明要解决的技术问题是提供一种铁路桥梁检测车,能提升桥梁检测的智能化水平,降低桥梁检测作业强度,提升检测作业范围及作业效率。
5.为了解决上述问题,本发明的技术方案如下:
6.一种铁路桥梁检测车,包括车架、设于所述车架两端的前车体和后车体、设于所述车架下方的动力转向架、无动力转向架、空气系统、动力传动系统、燃油系统和液压系统、设于所述车架上并位于所述前车体和后车体之间的作业装置、设于作业装置用于检测桥梁病害的检测装置、设于所述车架上的交流电气系统和直流电气系统、及控制系统;
7.所述作业装置包括固定于车架的整体回转机构、设于所述整体回转机构的升降机构、设于所述升降机构的横向伸缩机构、与所述横向伸缩机构连接的多节作业臂、用于驱动每节作业臂回转的多个回转马达;
8.所述横向伸缩机构为三组,分别包括用于带动所述作业臂伸出或回缩的伸缩杆、用于驱动所述伸缩杆动作的动力装置;
9.所述回转马达、伸缩机构分别与所述控制系统电连接,所述控制系统根据工作环境信息控制所述横向伸缩机构的伸缩长度,且当监测其中一组伸缩杆靠近障碍时,所述控制系统控制对应的伸缩杆回缩,同时控制其他两组横向伸缩机构锁定,使所述作业装置实现绕杆作业;且所述控制系统根据工作环境信息控制所述回转马达带动对应的作业臂展开或收拢;
10.所述检测装置设于所述作业臂,其包括数据采集系统和数据处理系统,所述数据采集系统采集检测桥梁数据并将数据发送至所述数据处理系统,所述数据处理系统对接收的数据信息进行分析,获得桥梁存在病害及位置信息。
11.进一步地,所述数据处理系统采用基于影像的密集三维重建模型、基于激光数据的三维重建模型或基于设计图纸的三维模型进行数据分析。
12.进一步地,所述伸缩杆为电推杆,所述动力装置为电驱动装置。
13.进一步地,所述伸缩杆为液压油缸,所述动力装置为液压驱动装置。
14.进一步地,所述检测装置用于检测桥梁表面、桥梁螺栓松动、以及梁体、支座防尘座、垫石、步行板的裂缝等病害。
15.进一步地,所述检测装置为视觉检测装置。
16.进一步地,所述动力传动系统包括柴油机、变速箱、传动轴及车轴齿轮箱,所述柴油机的飞轮端直连变速箱,所述变速箱输出端通过传动轴与车轴齿轮箱连接;柴油机自由端通过传动轴连接分动箱,分动箱的输出端连接液压泵及空压机。
17.进一步地,所述直流电气系统用于控制车辆动力传动系统的启停及运转,控制车辆运行速度为0-120km/h,并控制车辆定位停车的精度为
±
300mm。
18.进一步地,所述控制系统能够根据作业工况判断反馈给直流电气系统指令,控制车辆的启动、运行速度及停车。
19.进一步地,还包括设于所述前车体或后车体顶部的隧道检测装置安装接口。
20.进一步地,所述作业臂采用合金桁架结构。
21.与现有技术相比,本发明提供的铁路桥梁检测车,有益效果在于:
22.一、本发明提供的铁路桥梁检测车,在车架上安装可回转的作业装置,并根据工作环境控制每节作业臂的回转角度,使位于作业臂的检测装置能够全面检测桥梁表面、桥梁螺栓松动、以及梁体、支座防尘座、垫石、步行板的裂缝等病害,从而提升桥梁检测的智能化水平,降低桥梁检测作业强度,提升检测作业范围及作业效率。
23.二、本发明采用三组横向伸缩机构带动作业臂伸出或回缩,且当监测其中一组伸缩杆靠近障碍时,控制系统控制对应的伸缩杆回缩,同时控制其他两组横向伸缩机构锁定,使作业装置实现绕杆作业,提升了作业效率和安全保障。
24.三、本发明采用基于视觉的检测方式,可根据作业状态实时运行完成检测作业、数据存储及处理;数据处理系统采用基于影像的密集三维重建模型、基于激光数据的三维重建模型或基于设计图纸的三维模型进行数据分析,可实现大数据平台管理,实现桥梁全寿命周期的科学管养。
25.四、本发明的铁路桥梁检测车,作业装置设置于车辆前车体和后车体之间,为车辆双向行驶提供了良好的瞭望条件;作业装置自带回转机构,可实现桥梁双侧病害的检测。
26.五、本发明的铁路桥梁检测车,作业臂采用合金桁架结构,更加轻量化,且检测作业时作业臂不易受风力的影响,提升了检测作业时的稳定性。
27.六、本发明的铁路桥梁检测车,作业装置控制系统能够根据作业工况判断反馈给车辆直流电气系统指令,控制车辆的启动、运行速度及停车。
28.七、本发明的铁路桥梁检测车,在前车体或后车体的骨架中预留隧道检测装置安装接口,可以拓展实现铁路桥梁、隧道检测一体化。
附图说明
29.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使
用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施案例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
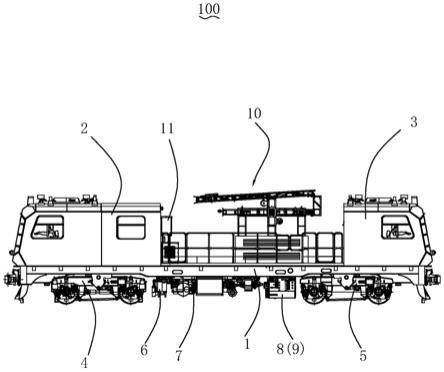
30.图1是本发明提供的铁路桥梁检测车的结构示意图;
31.图2是图1所示的铁路桥梁检测车的另一角度的结构示意图;
32.图3是图1所示的铁路桥梁检测车中作业装置的结构示意图;
33.图4是图3所示作业装置的另一角度的结构示意图;
34.图5是图3所示作业装置的再一角度的结构示意图。
具体实施方式
35.为了使本技术领域的人员更好地理解本发明实施例中的技术方案,并使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式作进一步的说明。
36.在此需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。此外,下面所描述的本发明各个实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
37.请结合参阅图1和图2,其中图1是本发明提供的铁路桥梁检测车的结构示意图;图2是图1所示的铁路桥梁检测车的另一角度的结构示意图。本发明提供的铁路桥梁检测车100包括车架1、设于车架1两端的前车体2和后车体3、设于车架下方的动力转向架4、无动力转向架5、空气系统6、动力传动系统7、燃油系统8和液压系统9、设于车架上的作业装置10、交流电气系统11和直流电气系统12、设于作业装置的检测装置13(未图示)、以及控制系统14。
38.前车体2和后车体3分布于车架1的两端,使检测车辆可以双向行驶。并在,在前车体2和后车体3内设置卧铺、司机台、柜体、座椅等车内设置。
39.动力转向架4和无动力转向架5分别对应于前车体2和后车体3设置,其结构可参考现有技术。
40.动力传动系统7包括柴油机、变速箱、传动轴及车轴齿轮箱,其中柴油机的飞轮端直连变速箱,变速箱输出端通过传动轴与车轴齿轮箱连接,柴油机自由端通过传动轴连接分动箱,分动箱的输出端连接液压系统9的液压泵和空气系统6的空压机;燃油系统8为动力传动系统7的柴油机提供动力油。
41.请结合参阅图3、图4和图5,其中图3是图1所示的铁路桥梁检测车中作业装置的结构示意图;图4是图3所示作业装置的另一角度的结构示意图;图5是图3所示作业装置的再一角度的结构示意图。作业装置10包括固定于车架1的整体回转机构105、设于整体回转机构105的升降机构101、设于升降机构101的横向伸缩机构103、与横向伸缩机构103连接的作业臂102、用于驱动每节作业臂102回转的多个回转马达104。
42.其中,作业装置自带整体回转机构105,可以将作业臂进行
±
180度转向,以实现桥梁双侧病害的检测。升降机构101可带动横向伸缩机构103、作业臂102进行升降,使作业臂到达合适的作业高度。
43.作业臂102为多节作业臂,与横向伸缩机构103连接,由横向伸缩机构103带动其整
体推出或回缩。回转马达104用于驱动相应的作业臂回转,使作业臂展开或收拢,使作业臂能够满足不同桥梁的检测。
44.横向伸缩机构103设于升降机构101顶端,且与作业臂102连接,带动作业臂在水平方向位移,用于在水平方向调整作业臂的位置。本实施例中,横向伸缩机构103为三组,分别包括用于带动作业臂伸出或回缩的伸缩杆1031、用于驱动伸缩杆1031动作的动力装置1032。
45.本实施例中,伸缩杆1031可以为电推杆,对应地,动力装置1032为电驱动装置;除此之外,伸缩杆1031还可以为伸缩油缸,对应地,动力装置1032为液压驱动装置。除了以上两种结构外,横向伸缩机构还可以为其他能够实现的结构,如翻转结构等。
46.作业装置10的工作由控制系统14控制,控制系统14的控制指令,以工作环境数据为依据进行动作。具体的,控制系统14可监测伸缩机构的工作环境、作业臂的工作环境(如桥梁的宽度、深度、立柱的位置,声屏障的高度等),优选地,控制系统14的监测装置为视觉监测装置等。工作中,控制系统14根据工作环境信息控制横向伸缩机构103的伸缩长度,且当监测其中一组伸缩杆靠近障碍时,控制系统14控制对应的伸缩杆回缩,同时控制其他两组横向伸缩机构锁定,使所述作业装置实现绕杆作业,提升了检测效率和作业安全保障;且控制系统14根据工作环境信息控制所述回转马达带动对应的作业臂展开或收拢,如根据桥梁宽度、深度控制多节作业臂的工作状态。
47.需要说明的是,本发明中升降机构101的升降也可以根据控制系统14监测的工作环境数据自动动作,在此不做详细阐述。
48.本实施例中,作业臂采用合金桁架结构,具有轻量化的设计特点,在检测作业时,作业臂不易受风力影响,提升了检测作业的稳定性。作业装置设于前车体和后车体之间,为车辆双向行驶提供了良好的瞭望条件。
49.交流电气系统11和直流电气系统12用于为检测车上的检测装置13、控制系统14、操作系统等设备提供电源。其中,直流电气系统12用于控制车辆动力传动系统7的启停及运转,控制车辆运行速度为0-120km/h,并控制车辆定位停车的精度为
±
300mm。同时,所述控制系统14能够根据作业工况判断反馈给直流电气系统12指令,控制车辆的启动、运行速度及停车。
50.检测装置13设于作业臂102,其数量可以为多个,用于检测桥梁表面、桥梁螺栓松动、以及梁体、支座防尘座、垫石、步行板的裂缝等病害。本实施例中,检测装置为视觉检测装置,可根据作业状态实时运行完成检测作业、数据存储及处理。具体的,检测装置13包括数据采集系统(未图示)和数据处理系统(未图示),数据采集系统设于所述作业臂,用于采集检测桥梁数据并将数据发送至数据处理系统,数据处理系统对接收的数据信息进行分析,获得桥梁存在病害及位置信息。
51.本实施例中,数据处理系统采用基于影像的密集三维重建模型、基于激光数据的三维重建模型或基于设计图纸的三维模型进行数据分析,可实现大数据平台管理,实现桥梁全寿命周期的科学管养。
52.本发明中,还可在前车体或后车体的顶部设置隧道检测装置安装接口,用于拓展对隧道进行检测,实现铁路桥梁、隧道检测一体化。
53.与现有技术相比,本发明提供的铁路桥梁检测车,有益效果在于:
54.一、本发明提供的铁路桥梁检测车,在车架上安装可回转的作业装置,并根据工作环境控制每节作业臂的回转角度,使位于作业臂的检测装置能够全面检测桥梁表面、桥梁螺栓松动、以及梁体、支座防尘座、垫石、步行板的裂缝等病害,从而提升桥梁检测的智能化水平,降低桥梁检测作业强度,提升检测作业范围及作业效率。
55.二、本发明采用三组横向伸缩机构带动作业臂伸出或回缩,且当监测其中一组伸缩杆靠近障碍时,控制系统控制对应的伸缩杆回缩,同时控制其他两组横向伸缩机构锁定,使作业装置实现绕杆作业,提升了作业效率和安全保障。
56.三、本发明采用基于视觉的检测方式,可根据作业状态实时运行完成检测作业、数据存储及处理;数据处理系统采用基于影像的密集三维重建模型、基于激光数据的三维重建模型或基于设计图纸的三维模型进行数据分析,可实现大数据平台管理,实现桥梁全寿命周期的科学管养。
57.四、本发明的铁路桥梁检测车,作业装置设置于车辆前车体和后车体之间,为车辆双向行驶提供了良好的瞭望条件;作业装置自带回转机构,可实现桥梁双侧病害的检测。
58.五、本发明的铁路桥梁检测车,作业臂采用合金桁架结构,更加轻量化,且检测作业时作业臂不易受风力的影响,提升了检测作业时的稳定性。
59.六、本发明的铁路桥梁检测车,作业装置控制系统能够根据作业工况判断反馈给车辆直流电气系统指令,控制车辆的启动、运行速度及停车。
60.七、本发明的铁路桥梁检测车,在前车体或后车体的骨架中预留隧道检测装置安装接口,可以拓展实现铁路桥梁、隧道检测一体化。
61.以上结合附图对本发明的实施方式作出详细说明,但本发明不局限于所描述的实施方式。对本领域的技术人员而言,在不脱离本发明的原理和精神的情况下对这些实施例进行的多种变化、修改、替换和变型均仍落入在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1